本文主要是介绍noise1:A Universal Noise Removal Algorithm With an Impulse Detector,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.该篇论文介绍了一个脉冲噪声检测和降噪方法。
1)引入一种局部图像统计方法来识别被随机脉冲噪声破坏的像素。通过统计相邻像素在强度上的差异来实现。
2)将脉冲像素检测方法 集成到 双边滤波中,得到的滤波器可以去除脉冲噪声和高斯噪声。
2.什么是脉冲噪声
脉冲噪声(impulse noise):是一定概率出现的噪声,对于一副图像,可能会有一定比例的像素出现脉冲噪声,因此脉冲噪声一般不是每个像素都有。
另外噪声像素 的 分布 一般是均匀分布,对于8bit图像可能是0-255中的任何值
其中有一种特殊情况,就是被噪声污染的点只可能是0,255,这种噪声又称椒盐噪声(salt-and-pepper noise)。

import numpy as npimport cv2
import matplotlib.pyplot as plt
def show_img4(im1, im2, im3, im4):plt.figure()plt.subplot(221)plt.imshow(im1)plt.subplot(222)plt.imshow(im2)plt.subplot(223)plt.imshow(im3)plt.subplot(224)plt.imshow(im4)plt.show()
def add_impulse_noise(im, p):im2 = im.copy()n = np.random.randint(0, 256, im.shape)sel = np.random.rand(*im.shape) < p # uniform distribution , [0,1)im2[sel] = n[sel]return im2def add_salt_and_pepper_noise(im, p):im2 = im.copy()n = np.random.randint(0, 2, im.shape)*255# print(n[:10,:10,0])sel = np.random.rand(*im.shape) < p # uniform distribution , [0,1)im2[sel] = n[sel]return im2
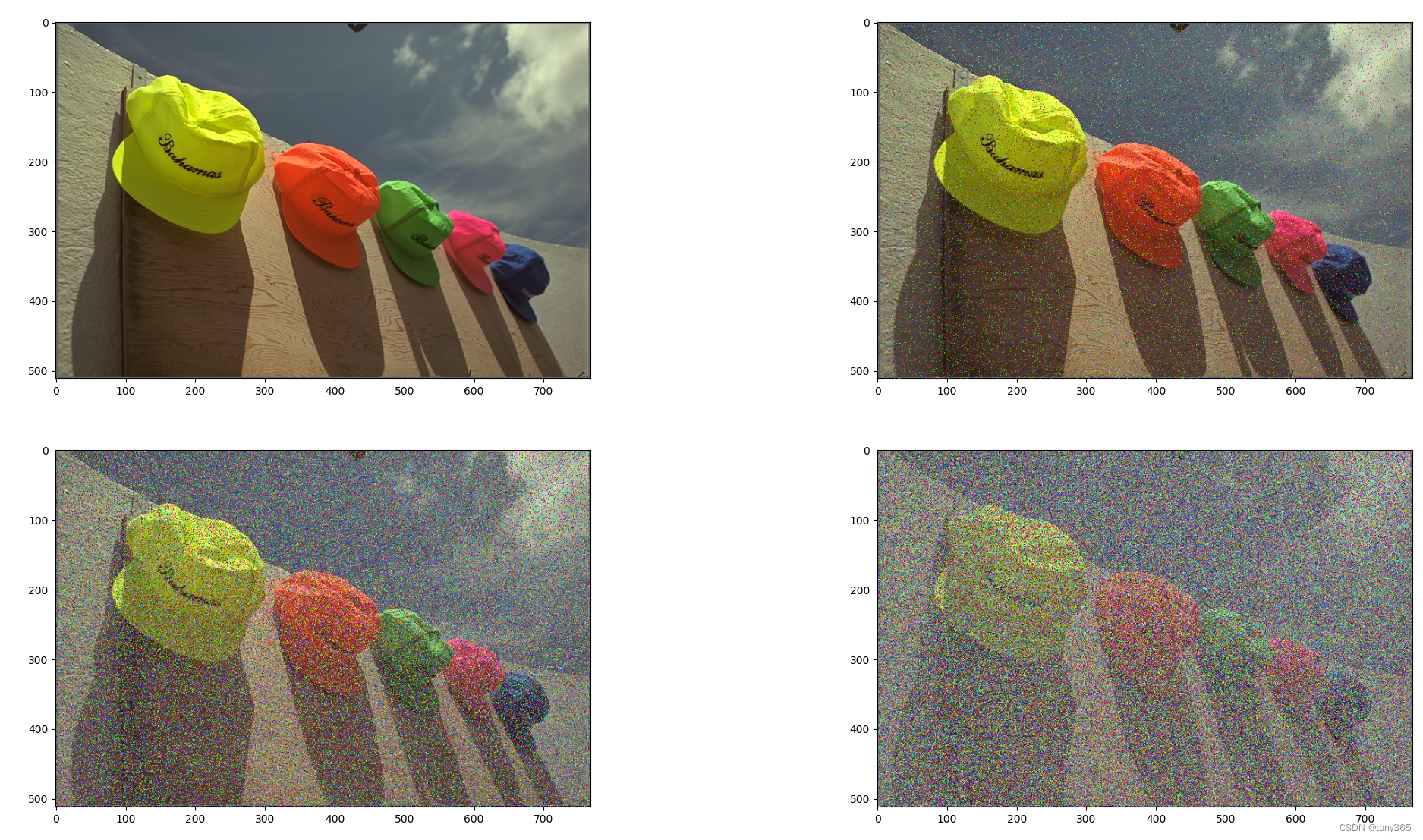
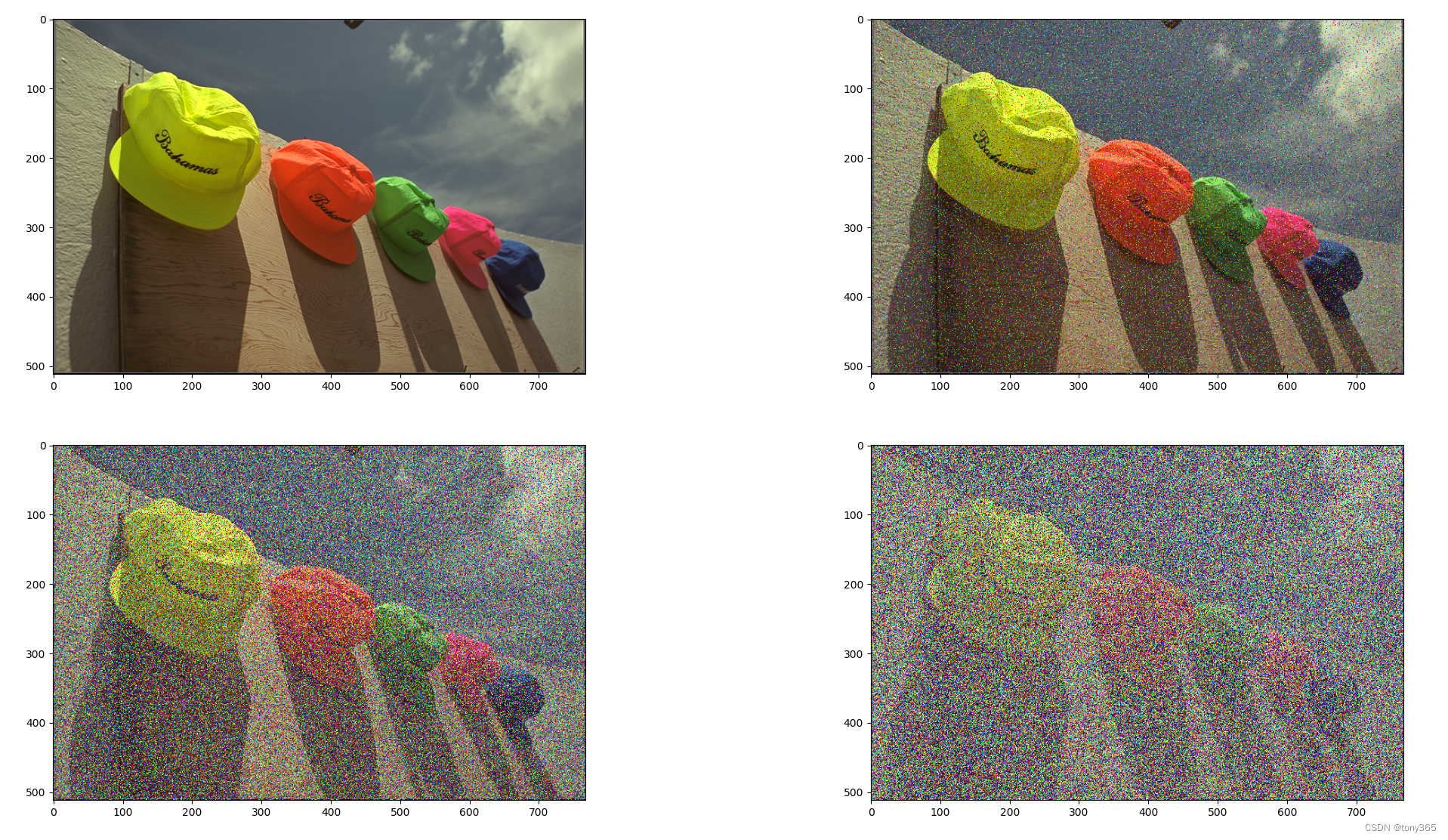
if __name__ == "__main__":file = r'G:\dataset\kodak\kodim03.png'im = cv2.imread(file)im = im[..., ::-1]im_impulse_noise = add_impulse_noise(im, 0.1)im_impulse_noise2 = add_impulse_noise(im, 0.4)im_impulse_noise3 = add_impulse_noise(im, 0.7)show_img4(im, im_impulse_noise, im_impulse_noise2, im_impulse_noise3)im_salt_and_pepper = add_salt_and_pepper_noise(im, 0.1)im_salt_and_pepper2 = add_salt_and_pepper_noise(im, 0.4)im_salt_and_pepper3 = add_salt_and_pepper_noise(im, 0.7)show_img4(im, im_salt_and_pepper, im_salt_and_pepper2, im_salt_and_pepper3)
添加脉冲噪声和椒盐后的结果图:
3.一般的脉冲噪声滤波算法分为检测和去除两个步骤,
大部分针对的是 椒盐噪声这种情况(文中称其离散的脉冲噪声,区别于 0-255均匀分布的脉冲噪声)。但是如果不是椒盐噪声则很难检测到,比如 只 偏离 一个比较小的值。
对此,作者引入一个策略来表示这个 像素是脉冲噪声的可能性(偏离度),可能性越大,越可能是脉冲噪声,因此可以把它当做脉冲噪声像素,提高过滤的强度,反之降低过滤的强度。
1)如何检测:
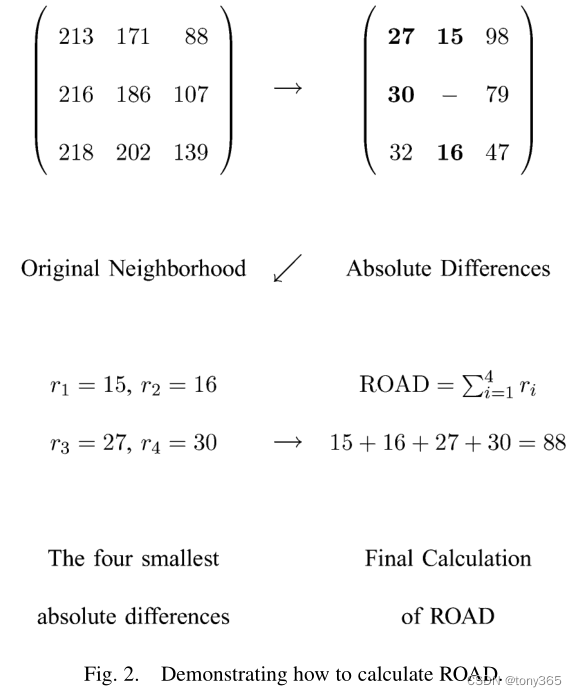
这里以3*3的邻域举例,公式中的m取 4,x是中心像素,y是邻域像素
a.计算和邻域的绝对差
b. 计算m个最小的 绝对差 的和,这样其实就是找到领域和 中心像素最近的几个像素的差的 和,这个和在一定程度上反映了 当前像素是离散点(outlier点,脉冲噪声点)的可能性。
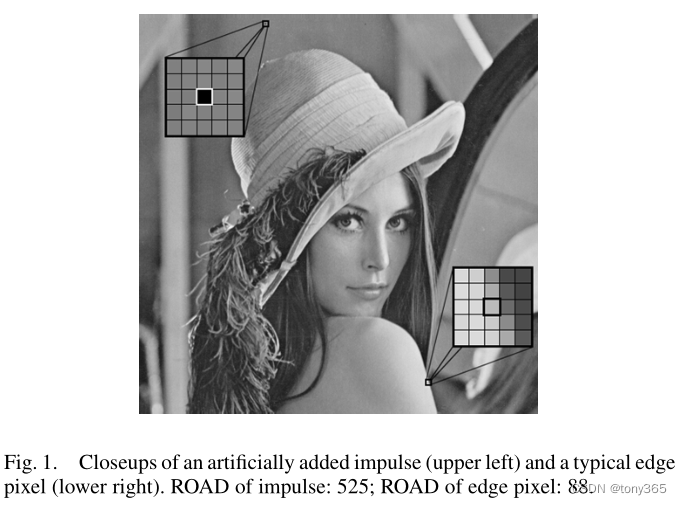
如下面图示意:
左上角是噪声点,比周围像素暗很多,因此得到的ROAD(m=4)也比较大为525
右下角非脉冲噪声点(或者噪声很小),ROAD(m=4)为88
c. 具体的ROAD计算流程就是上面所说的两个简单步骤
示意图如下:
2)如何过滤(自适应强度)
利用1)的方法检测像素点脉冲噪声的强度后,滤波强度也可以跟着变化,所以才是自适应的嘛。
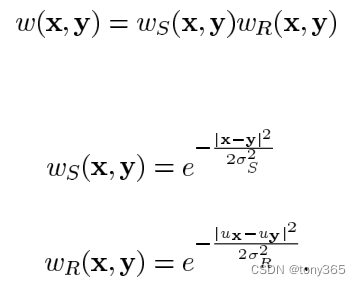
这里引入双边滤波
双边滤波是邻域滤波,邻域的weight 不仅由像素点距离决定,还受 像素值的差异影响,与中心像素差异小的weight大,反之weight小。
如下图,Ws是距离weight, Wr是 值weight
那么我们也可以定义一个脉冲噪声强度的weight.
x是脉冲噪声的可能性越大(偏离程度越大),WI 就越小,
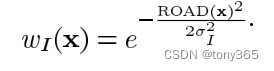
注意这里 WI的函数是评价邻域的像素点的脉冲噪声的。
如果是脉冲噪声,则赋予较小的weight,看下面公式,三者相乘就是该领域点的weight(先忽略 指数上标)

重点来了,WI 和 WR是互相矛盾的, 举例如果一个白色背景上有脉冲噪声暗点,WR会找到和他比较相近的暗点赋予高weight,WI 赋予其邻域暗点的则是低weight(因为邻域暗点的是脉冲噪声的可能性大)。
但是 WR项仍然可以保留,保留下来可以过滤那些 偏离较小的 像素点(非salt and pepper) ,这样我们可以通过 是脉冲噪声的可能性来控制 这两项的平衡。
当检测到是脉冲噪声时, WI 起更大作用,否则WR起更大作用。
这是通过J(x,y)项来实现的。
x,y只要有一个是脉冲噪声则J近似为1, WI起主要作用,赋予值差异大的邻域像素点较大的权重。
如果都不是脉冲噪声,近似为0, WR起主要作用,过滤轻度偏离的噪声点(脉冲噪声或者高斯噪声等噪声)

以上就是整个算法的原理了,双边滤波变成了三边滤波,保持原有的降噪(比如高斯)功能的同时具有了过滤脉冲噪声的功能
4. 参数如何选择
WS,WR,WI里面的sigma参数控制着形状,如何设置?
和噪声强度以及ROAD的强度是有关系的。
作者将
sigma_s对于高斯噪声设为 5,对于脉冲噪声设为 0.5
sigma_r设为 2倍的高斯噪声标准差(前提是你得首先估计出图像的噪声水平,这是另一个相关的算法领域了,文中用了一个比较早的方法)
sigma_i 设为40, 在[25,55]之间都基本满足。
sigma_J设为50, [30,80]之间也都OK
5. code和实验
上面左图为原图,有图 为添加 椒盐噪声20%和高斯噪声方差为10的混合噪声,
下面左图是双边滤波,右图是本人复现的代码降噪效果
可以看出还有个别 脉冲噪声没有被过滤掉

C-style的代码,运行时间可是真慢
def cal_road(im_gray, radiu=3):h, w = im_gray.shapeif radiu == 1:m = 5else:m = radiu * radiu // 3road = np.zeros(im_gray.shape, np.int32)for i in np.arange(radiu, h-radiu):for j in np.arange(radiu, w-radiu):c0 = im_gray[i, j]ro = []for ii in np.arange(-radiu, radiu+1):for jj in np.arange(-radiu, radiu+1):it = i + iijt = j + jjc1 = im_gray[it, jt]ro.append(abs(int(c1)-c0))ro = np.sort(np.array(ro))road[i, j] = int(np.sum(ro[:m]))# if i < 10 and j < 10:# print(m, ro, sum(ro[:m]), road[i, j])return roaddef trilateral_filter(im_gray, road, radiu=1, sigma_s=5, sigma_r=20, sigma_i=40, sigma_j=50):im2 = im_gray.copy()h, w = im2.shapefor i in np.arange(radiu, h-radiu):for j in np.arange(radiu, w-radiu):c0 = im2[i, j]sum_v = 0w_v = 0for ii in np.arange(-radiu, radiu+1):for jj in np.arange(-radiu, radiu+1):it = i + iijt = j + jjc1 = im2[it, jt]a = (it-i)*(it-i) + (jt-j)*(jt-j)b = (int(c1) - c0)*(int(c1)-c0)ws = np.exp(-a / 2 / (sigma_s * sigma_s))wr = np.exp(-b / 2 / (sigma_r * sigma_r))c = road[it, jt] * road[it, jt]d = (road[it, jt] + road[i, j])**2wi = np.exp(-c / 2 / (sigma_i * sigma_i))J = 1 - np.exp(-d/8/(sigma_j * sigma_j))weight = ws * (wr**(1-J)) * (wi**J)sum_v += weight * c1w_v += weightim2[i, j] = np.round(sum_v / w_v).astype(np.int32)# if i < 10 and j < 10:# print(i, j, sum_v, w_v, im2[i, j], im_gray[i, j])im2 = np.clip(im2, 0, 255).astype(np.uint8)return im2if __name__ == "__main__":file = r'G:\dataset\kodak\kodim03.png'im = cv2.imread(file)#im = cv2.resize(im, [200,200])im = im[..., ::-1]im_impulse_noise = add_impulse_noise(im, 0.2)im_impulse_noise2 = add_impulse_noise(im, 0.4)im_impulse_noise3 = add_impulse_noise(im, 0.7)#show_img4(im, im_impulse_noise, im_impulse_noise2, im_impulse_noise3)im_salt_and_pepper = add_salt_and_pepper_noise(im, 0.2)im_salt_and_pepper2 = add_salt_and_pepper_noise(im, 0.4)im_salt_and_pepper3 = add_salt_and_pepper_noise(im, 0.7)#show_img4(im, im_salt_and_pepper, im_salt_and_pepper2, im_salt_and_pepper3)im_mix_noise = add_gaussian_noise(im_salt_and_pepper, 10)r, g, b = cv2.split(im_mix_noise)radiu = 1road = cal_road(r, radiu)r_denoised = trilateral_filter(r, road, radiu,sigma_s=5, sigma_r=20, sigma_i=40, sigma_j=50)road = cal_road(g, radiu)g_denoised = trilateral_filter(g, road, radiu,sigma_s=5, sigma_r=20, sigma_i=40, sigma_j=50)road = cal_road(b, radiu)b_denoised = trilateral_filter(b, road, radiu,sigma_s=5, sigma_r=20, sigma_i=40, sigma_j=50)im_res = cv2.merge([r_denoised, g_denoised, b_denoised])im_bi = cv2.bilateralFilter(im_mix_noise, 3, 10, 5)show_img4(im, im_mix_noise, im_bi, im_res)
这篇关于noise1:A Universal Noise Removal Algorithm With an Impulse Detector的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



![[Algorithm][综合训练][栈和排序][加减]详细讲解](https://i-blog.csdnimg.cn/direct/7df413c28a644b6097dcfa5df3fb027c.png)
![[Algorithm][综合训练][四个选项][接雨水]详细讲解](https://i-blog.csdnimg.cn/direct/9e062d23fecc4cdc937d86b7f56aad5b.png)


