本文主要是介绍YUV图像格式详解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.概述
YUV是一种图像颜色编码方式。
相对于常见且直观的RGB颜色编码,YUV的产生自有其意义,它基于人眼对亮度比色彩的敏感度更高的特点,使用Y、U、V三个分量来表示颜色,并通过降低U、V分量的采样率,尽可能保证图像质量的情况下,做到如下3点:
- 占用更低的存储空间
- 数据传输效率更高
- 兼容黑白与彩色显示
具体是怎么做到的,后文中会一一讲解,在此之前,先简单过一下图像基础知识
2.像素
想要深入了解YUV格式,必须得从Bit、Byte级别“看穿看透”它
Bit:位 —— 计算机硬件系统能识别的最基础单位
Byte:字节 —— 计算机文件系统能识别的最基础单位
像素:Pixel —— 显示图像的最基础单位
显示器上的一个像素点对应图像里的一个像素,不管哪种显示器,最终都是以像素为最小单位进行图像呈现。
- 早期CRT显示器通过显像管中电子枪喷射电子流到屏幕实现。
- 现在的LCD显示器通过电压改变液晶分子排列实现。
- LED和OLED显示器则是通过点阵式发光二极管实现。
不论技术怎么革新,有两点是始终不变的:
- 显示的基础单元是像素
- 每个像素的色彩由红、绿、蓝三原色混合实现
三原色是什么?显示器像素点的颜色数据是怎么排列存储的?
带着问题先了解下RGB,为YUV的了解做个铺垫
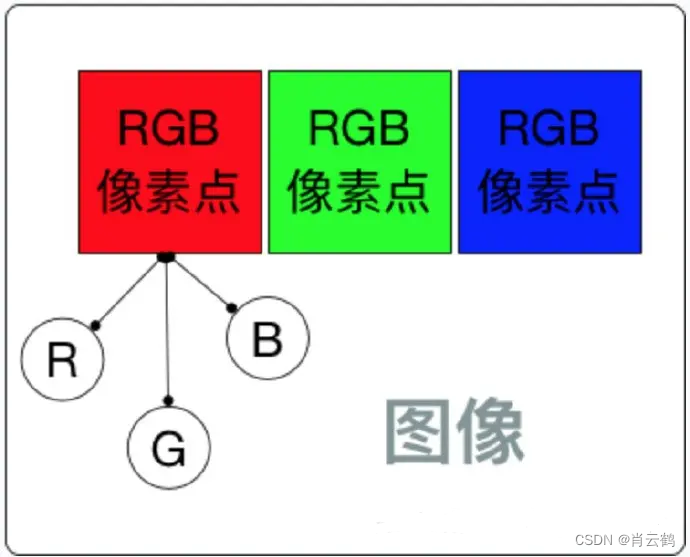
3.RGB
RGB:用R、G、B三个分量来表示像素点颜色
- R:红(Red)
- G:绿(Green)
- B:蓝(Blue)
这三种颜色就称为三原色,它们以不同比例混合能生成其他任意颜色
RGB表示一帧图像:
- 每个像素点背后都包含一组R、G、B分量,像素点的颜色就是它们的混合
- R、G、B每个分量分别占1个byte,也就是8个bit (也有其他精度,本博文不作研究)
一张分辨率 1280 * 720 的RGB图片,占用 1280 * 720 * 3 / 1024 / 1024 = 2.63MB 空间。
4.YUV表示图像
YUV:用Y、U、V三个分量来表示像素颜色
- Y 表示亮度(Luminance、缩写Luma),即为灰度值
- U 和 V 表示色度(Chrominance、缩写Chroma),即为色调和饱和度
YUV表示一帧图像:
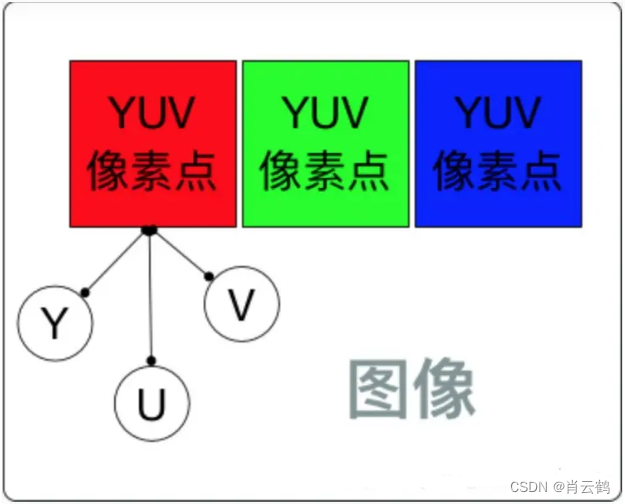
默认Y、U、V每个分量占用存储空间1个byte(也有其他精度,本博文不作研究)
一张分辨率为 1280 * 720 的YUV图片,采用上图里每个像素都包含一组Y、U、V分量的情况下,还是会占用 "1280 * 720 * 3 / 1024 / 1024 = 2.63 MB" 空间。
问题来了,这不是跟RGB占用的空间一样吗?并没有什么优化啊!
前文概述中提到过,YUV是通过降低U、V分量的采样率来实现它占用空间小和传输效率高的优势。
也就是图像每个像素的Y分量都被完整采样全部保存,但是U、V分量只做部分采样,让多个像素按照一些规则共用U、V分量。
5.YUV类别
根据U、V分量的采样率不同,也就是多个像素共用U、V分量的规则不同,YUV有如下几个常见类别:
- 4:4:4 一个像素一组Y、U、V
- 4:4:0 垂直方向两个像素共用一组U、V
- 4:2:2 水平方向两个像素共用一组U、V
- 4:2:0 水平垂直四个像素共用一组U、V
- 4:1:1 水平方向四个像素共用一组U、V
(1).YUV444:
每个像素都包含一组完整的Y、U、V分量
YUV444 每个像素占用的存储空间,也就是像素深度(piex_depth)为:3 * 8bit = 24bits
一帧 YUV444 图像占用的空间就是:w * h * 3byte

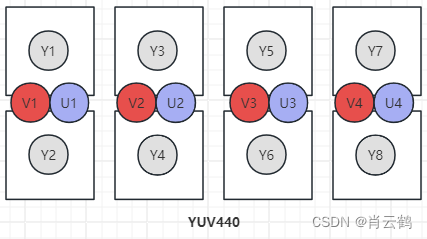
(2).YUV440:
垂直方向两个相邻的像素共用一组U、V
YUV440的像素深度(piexl_depth):(1 * 8bit) + (0.5 *8bit) + (0.5 *8bit) = 16bits
一帧 YUV444 图像占用的空间就是:w * h * 2byte
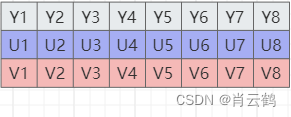
(3).YUV422:
水平方向两个相邻的像素共用一组U、V
YUV422 的像素深度(piexl_depth):(1 * 8bit) + (0.5 *8bit) + (0.5 *8bit) = 16bits
一帧 YUV444 图像占用的空间就是:w * h * 2byte

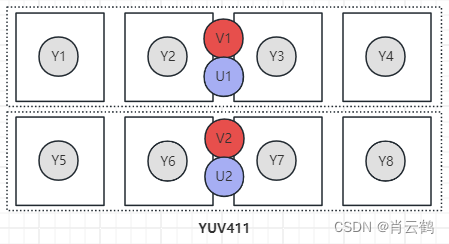
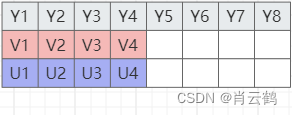
(4).YUV411:
水平方向两个相邻的像素共用一组U、V
YUV411 的像素深度(piexl_depth):(1 * 8bit) + 2*(0.25 *8bit) = 12bits
一帧 YUV444 图像占用的空间就是:w * h * 1.5byte
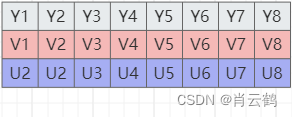
(5).YUV420:
水平垂直方向四个相邻的像素共用一组U、V
YUV420的像素深度(piexl_depth):(1 * 8bit) + 2*(0.25 *8bit) = 12bits
一帧YUV444图像占用的空间就是:w * h * 1.5byte
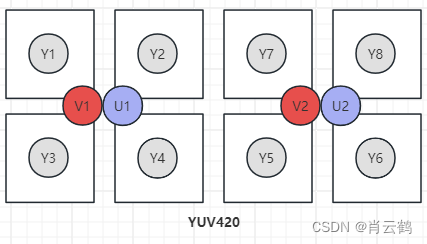
注意:
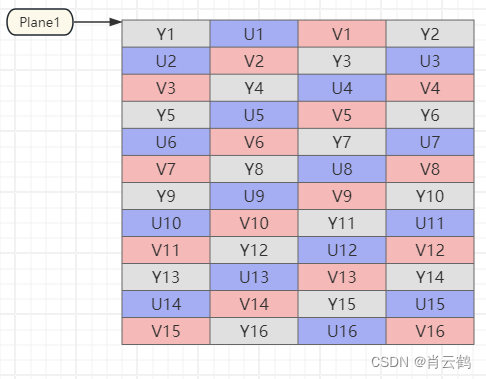
YUV420 因为是 2x2 矩阵平面的4个像素共用一组U、V
所以它的像素排列顺序在内存空间中有其特定规律,按"Z"字型排列

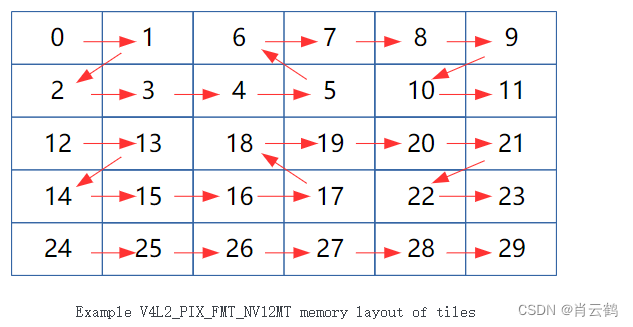
参考链接:2.7.1.2. Planar YUV formats — The Linux Kernel documentation
(6).综述
如上所述,根据U、V分量不同的采样规则,YUV可以分为多个类别
以上列举的是较为常见的几种,还有其他YUV类别,有兴趣可自行研究
每一类YUV又可以根据Y、U、V三个分量数据的存储排列方式不同细分出不同格式
6.YUV数据存储模式
(1).三种存储模式
- planar平面模式:先连续存储所有像素点的 Y 分量,
再连续存 U 分量,
然后连续存 V 分量 - Semi-Planar半平面模式:先连续存储所有像素点的 Y 分量,
再交替存储U、V分量 - packed 打包模式:连续交替存储每个像素点的 Y、U、V 分量
注:在YUV422中,有时候会看到还有一种 Interleaved 模式,它其实就是 Packed,
只不过YUV422格式中有人觉得用 Interleaved 这个词更形象一些,
所以在YUV422中有时会用 Interleaved 代替 Packed 表述。
(2).三种存储模式图示:
以一张全采样 4x4=16 个像素的 YUV444 格式图像为例,
它在三种模式下各分量在内存空间的排列如下:
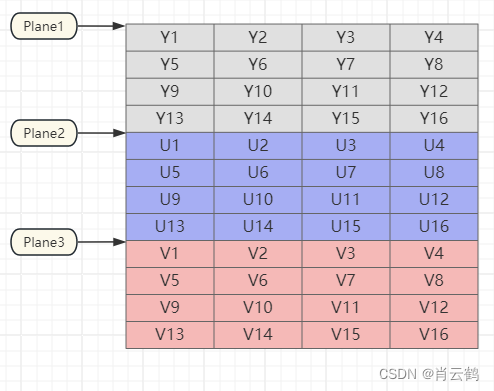
Planar:3个矩阵平面分别存储Y、U、V分量数据
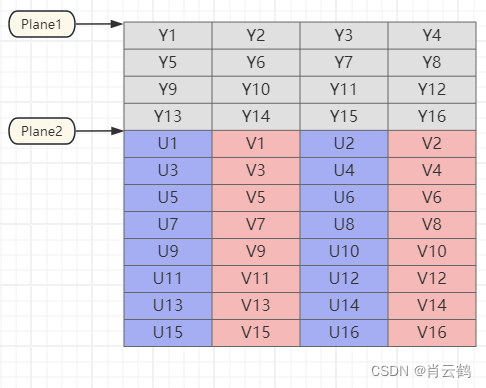
Semi-Planar:Semi即为"一半",一个矩阵平面存Y,存U、V只用Planar的一半一个矩阵平面
Packed:Y、U、V三个分量交替存一个矩阵平面
当然,即便是YUV444全采样类别,三种模式下Y、U、V分量的存储排列也不仅仅只有上述三种,还可以排列出很多花样,产生多种格式,这一点在后面的章节会详细讲到。
(3) Y、U、V分量对应Byte[ ]数组示例
如果要对图像做一些操作,比如图像格式转换,任意区域裁剪,色值修改,像素插值等,就需要在图像最基础单元byte层面,将图像数据从内存中读出解析到byte[ ]数组来操作。
不同模式解析出来的byte[ ]数组个数是不一样的
- Planar: 3个byte[ ],分别对应Y、U、V 分量数据
- Semi-Planar:2个byte[ ],分别对应 Y 和 (U、V)
- Packed: 1个byte[ ],对应(Y、U、V)
Android Camera2中有个很形象的示例:
onImageAvailable(ImageReader reader) 回调获取到的Image图像就是YUV420 planar格式,Image有3个分别包含ByteBuffer的Plane,每个Plane的ByteBuffer解析成byte[ ]后,就会有如下对应关系:
@Override
public void onImageAvailable(ImageReader reader) {Image image = reader.acquireNextImage();ByteBuffer bufferY = image.getPlanes()[0].getBuffer();ByteBuffer bufferU = image.getPlanes()[1].getBuffer();ByteBuffer bufferV = image.getPlanes()[2].getBuffer();byte[] bytesY = new byte[bufferY.capacity()];byte[] bytesU = new byte[bufferU.capacity()];byte[] bytesV = new byte[bufferV.capacity()];bufferY.get(bytesY);bufferU.get(bytesU);bufferV.get(bytesV);image.close();
}
YUV420 planar:
byetdata[0] —— Y分量, Y1, Y2, Y3, Y4, Y5, Y6, Y7, Y8…, Y16, …
byetdata[1] —— U分量, U1, U2, U3, U4……
byetdata[2] —— V分量, V1, V2, V3, V4 ……
假设一下,
如果拿到的不是planar而是YUV420 semi-planar 或 YUV444 packed
图像数据解析成byte[ ]后的对应关系:
YUV420 semi-planar:
byetdata[0] —— Y分量, Y1, Y2, Y3, Y4, Y5, Y6, Y7, Y8……
byetdata[1] —— U、V分量, U1, V1, U2, V2……
byetdata[2] 没有
YUV444 packed:
byetdata[0] ——-Y、U、V分量, Y1, U1, V1, Y2, U2, V2, Y3, U3, V3……
byetdata[1] 和byetdata[2] 没有
这么看可能不是太直观,下面就用图示看看不同格式的YUV,它的三个分量是怎么排列存储的
7.YUV格式详细注解
一帧宽:w,高:h 的YUV图像,
以8个像素为例,一些常见YUV格式分量的存储排列如下:
7.1 YUV420
(1).YUV420 Plannar:I420
YUV分量分别存放,先是 w * h 个的 Y,后面跟 w * h * 0.25 个 U, 最后是 w * h * 0.25 个 V
每个像素占用空间(像素深度):1.5byte
总大小为: w * h * 1.5

(2).YUV420 Plannar:YV12
YUV 分量分别存放,先是 w * h 个 Y,后面跟 w * h * 0.25 个 V, 最后是 w * h * 0.25 个 U
每个像素占用空间(像素深度):1.5byte
总大小为: w * h * 1.5

(3).YUV420 Semi-Planar:NV12
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 U 开始
每个像素占用空间(像素深度):1.5byte
总大小为: w * h * 1.5
(4).YUV420 Semi-Planar:NV21
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 V开始
每个像素占用空间(像素深度):1.5byte
总大小为:w * h * 1.5
7.2 YUV422
(1).YUV422 Plannar:I422
YUV 分量分别存放,先是 w * h 个 Y,后面跟 w * h * 0.5 个 U, 最后是 w * h * 0.5 个 V
每个像素占用空间(像素深度):2byte
总大小为: w * h * 2
(2).YUV422 Plannar:YV16
UV 分量分别存放,先是 w * h 个 Y,后面跟 w * h * 0.5 个 V, 最后是 w * h * 0.5 个 U
每个像素占用空间(像素深度):2byte
总大小为: w * h * 2
(3).YUV422 Semi-Planar:NV61
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 V 开始
每个像素占用空间(像素深度):2byte
总大小为:w * h * 2

(4).YUV422 Semi-Planar:NV16
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 U 开始
每个像素占用空间(像素深度):2byte
总大小为:w * h * 2

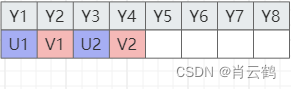
(4).YUV422Packed (Interleaved):YUVY
Interleaved 即是 Packed ,在 Packed 内部,YUV 的排列顺序是 Y U V Y,两个 Y 共用一组 UV
每个像素占用空间(像素深度):2byte
总大小为:w * h * 2

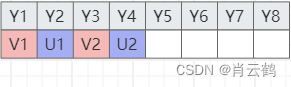
(6).YUV422Packed (Interleaved):UYVY
YUV 的排列顺序是 UYVY,两个 Y 共用一组 UV
每个像素占用空间(像素深度):2byte
总大小为:w * h * 2

7.3 YUV444
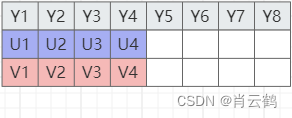
(1).YUV444 Plannar:I444
YUV 分量分别存放,先是 w * h 个 Y,后面跟 w * h 个 U, 最后是 w * h 个 V
每个像素占用空间(像素深度):3byte
总大小为: w * h * 3
(2).YUV444 Plannar:YV24
YUV 分量分别存放,先是 w * h 个 Y,后面跟 w * h 个 V, 最后是 w * h 个 U
每个像素占用空间(像素深度):3byte
总大小为:w * h * 3
(3).YUV444 Semi-Planar:NV24
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 U 开始。
每个像素占用空间(像素深度):3byte
总大小为:w * h * 3

(4).YUV444 Semi-Planar:NV42
Y 分量单独存放,UV 分量交错存放,UV 在排列的时候,从 V 开始。
每个像素占用空间(像素深度):3byte
总大小为:w * h * 3

8.YUV格式详图
下图即为YUV常见格式详细图示,方便后续查阅
最后一列仍是以8个像素点为例,简略地表示每个格式Y、U、V分量的存储排列

9.结束语
关于YUV格式就先讲解这么多。
在此篇博文撰写过程中,也参考了多篇官方和非官方的资料文档。
非官方的博文资料有的会出现一些纰漏,比如某种格式NV24,是UV交替还是VU交替,有的个人文档里就表述错了,遇到这种问题就需要参考官方资料进行比对。
感谢这些官方机构和个人博主们。
参考链接如下:
官方参考链接:
2. Image Formats — The Linux Kernel documentation
2.10. YUV Formats — The Linux Kernel documentation
2.7.1.2. Planar YUV formats — The Linux Kernel documentation
YUV - VideoLAN Wiki
Video Rendering with 8-Bit YUV Formats | Microsoft Learn
个人博客参考连接:
YUV 格式详解,只看这一篇就够了(转) - 知乎
YUV图像的常见格式(图示)_yuv图片-CSDN博客
YUV格式到底是什么?-CSDN博客
【精选】YUV格式详解【全】_编码笔记的博客-CSDN博客
音视频基础之YUV格式-CSDN博客
【精选】安卓camera2 API获取YUV420_888格式详解_yuv_420_888-CSDN博客
这篇关于YUV图像格式详解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





