本文主要是介绍ardupilot开发 --- 串韭菜篇解惑篇,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
几个疑问和个人理解
FLIGHT MODE ?
sub mode ?
costomer mode ?
联系?区别?
下面这个 _mode 是?
// call the correct auto controllerswitch (_mode) {case SubMode::TAKEOFF:takeoff_run();break;case SubMode::WP:case SubMode::CIRCLE_MOVE_TO_EDGE:wp_run();break;
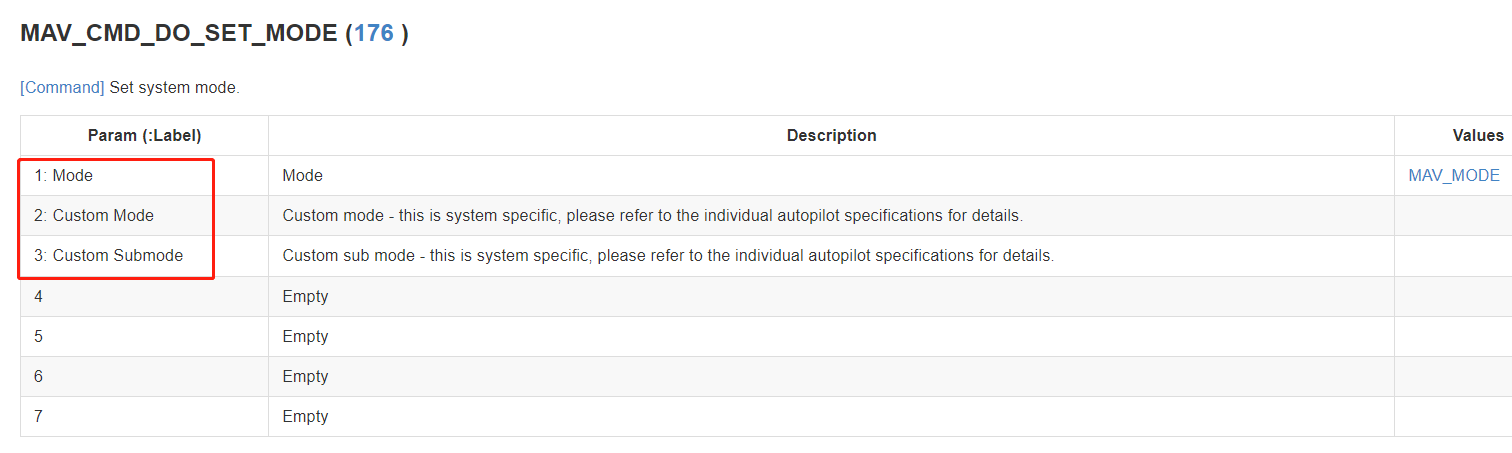
mavlink 中的 mode ?ardupilot 中的 mode ?两个是不一样的!
mavlink 中的 mode:
枚举值:https://ardupilot.org/copter/docs/parameters.html#fltmode1
各模式概述:https://ardupilot.org/copter/docs/flight-modes.html#flight-modes
ardupilot 中的 mode 和 sub mode :
mode:
<enum name="COPTER_MODE"><description>A mapping of copter flight modes for custom_mode field of heartbeat.</description><entry value="0" name="COPTER_MODE_STABILIZE"/><entry value="1" name="COPTER_MODE_ACRO"/><entry value="2" name="COPTER_MODE_ALT_HOLD"/><entry value="3" name="COPTER_MODE_AUTO"/><entry value="4" name="COPTER_MODE_GUIDED"/><entry value="5" name="COPTER_MODE_LOITER"/><entry value="6" name="COPTER_MODE_RTL"/><entry value="7" name="COPTER_MODE_CIRCLE"/><entry value="9" name="COPTER_MODE_LAND"/><entry value="11" name="COPTER_MODE_DRIFT"/><entry value="13" name="COPTER_MODE_SPORT"/><entry value="14" name="COPTER_MODE_FLIP"/><entry value="15" name="COPTER_MODE_AUTOTUNE"/><entry value="16" name="COPTER_MODE_POSHOLD"/><entry value="17" name="COPTER_MODE_BRAKE"/><entry value="18" name="COPTER_MODE_THROW"/><entry value="19" name="COPTER_MODE_AVOID_ADSB"/><entry value="20" name="COPTER_MODE_GUIDED_NOGPS"/><entry value="21" name="COPTER_MODE_SMART_RTL"/><entry value="22" name="COPTER_MODE_FLOWHOLD"/><entry value="23" name="COPTER_MODE_FOLLOW"/><entry value="24" name="COPTER_MODE_ZIGZAG"/><entry value="25" name="COPTER_MODE_SYSTEMID"/><entry value="26" name="COPTER_MODE_AUTOROTATE"/><entry value="27" name="COPTER_MODE_AUTO_RTL"/></enum>
sub mode :
<enum name="SUB_MODE"><description>A mapping of sub flight modes for custom_mode field of heartbeat.</description><entry value="0" name="SUB_MODE_STABILIZE"/><entry value="1" name="SUB_MODE_ACRO"/><entry value="2" name="SUB_MODE_ALT_HOLD"/><entry value="3" name="SUB_MODE_AUTO"/><entry value="4" name="SUB_MODE_GUIDED"/><entry value="7" name="SUB_MODE_CIRCLE"/><entry value="9" name="SUB_MODE_SURFACE"/><entry value="16" name="SUB_MODE_POSHOLD"/><entry value="19" name="SUB_MODE_MANUAL"/></enum>
???
 # 飞控中的position target的含义
# 飞控中的position target的含义
原文:Set the vehicle’s target position (as an offset in NED from the EKF origin)
position target是基于NED坐标系的,也就是地固坐标系,又称local坐标系,坐标系的原点是 EKF origin,解锁电机并获得清晰GPS信息的位置点;
这篇关于ardupilot开发 --- 串韭菜篇解惑篇的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








