本文主要是介绍交叉编译tslib,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
交叉编译tslib
环境:
ubuntu16.04(虚拟机)
tslib 版本:1.4.0
交叉编译器:gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf
目标架构:ARM 野火imx6ull pro开发板
tslib的下载
tslib的下载地址 https://github.com/Microsoft/tslib
下载tslib到如下目录:

在编译前安装一些需要依赖的库
apt-get install autoconf automake libtool pkg-config m4

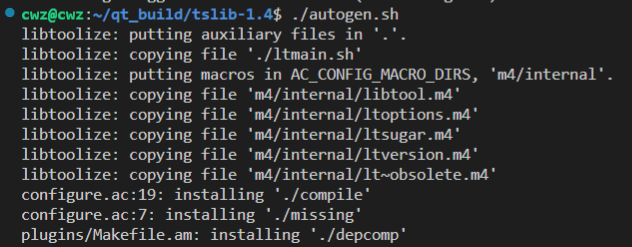
执行augtogen.sh脚本

sudo ./autogen.sh
输出信息如下:
配置编译器
这里交叉编译器使用了绝对路径,不使用绝对路径,第一次没有使用绝对路径,导致后面make install的时候出错了。所以,我使用绝对路径,这里是否使用绝对路径和交叉编译器的版本根据自己实际情况来。
./configure CC=/home/cwz/toolchain/gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc CXX=/home/cwz/toolchain/gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-g++ --host=arm-linux-gnueabihf --prefix=/opt/tslib1.4 ac_cv_func_malloc_0_nonnull=yes

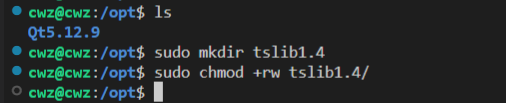
执行上面的命令前需要在/opt下创建tslib1.4目录,后面编译好的tslib文件会放到这里,创建目录如下图所示:
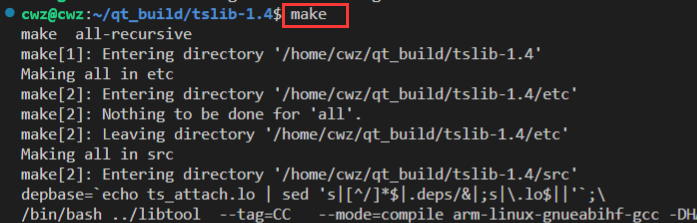
编译
这里直接输入make命令编译就可以了。
make
安装
输入下面命令就能安装了。
make install
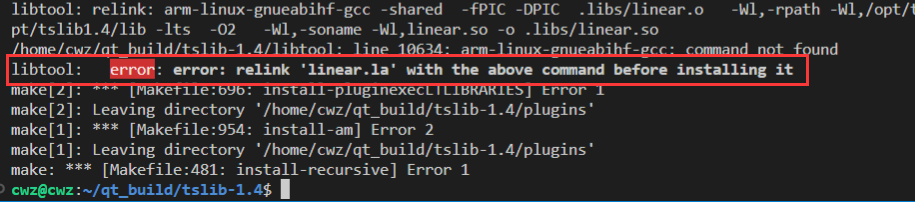
这里出现下面的错误,是由于没找到交叉编译器,导致没有生成需要的库,所以,上面配置编译编译器./configure那里使用绝对路径避免了下面问题。
修改配置文件
修改这个配置文件 /opt/tslib1.4/etc/ts.conf为后面编译qt做准备。
将这行内容注释取消。

到此就完成了tslib的交叉编译。
这篇关于交叉编译tslib的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








