本文主要是介绍摄影入门 | 微单相机的常见参数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
微单相机Mirrorless Interchangeable-lens Camera(无反光镜的可换镜头相机),与传统单镜头反光相机(DSLR)相比,它没有光学反光镜和光学取景器。微单相机主要通过电子取景器(EVF)或后置LCD显示器进行取景。微单相机可以提供较大的传感器尺寸、更小巧轻便的机身和出色的图像质量。下面是一些微单相机的常见参数和特点:
目录
1.传感器尺寸
2.解析度
3.镜头系统
4.自动对焦系统
5.连拍速度
6.电子取景器(EVF)
7.触摸屏和倾斜LCD
8.视频功能
9.Wi-Fi和蓝牙连接
1.传感器尺寸
微单相机通常具有较大的传感器尺寸,包括全画幅(Full Frame)和APS-C两种常见规格。全画幅传感器尺寸与35mm胶片相同,提供更高的图像质量和更好的低光性能。APS-C传感器则较小,但仍提供良好的图像质量,并具有更小巧轻便的机身。
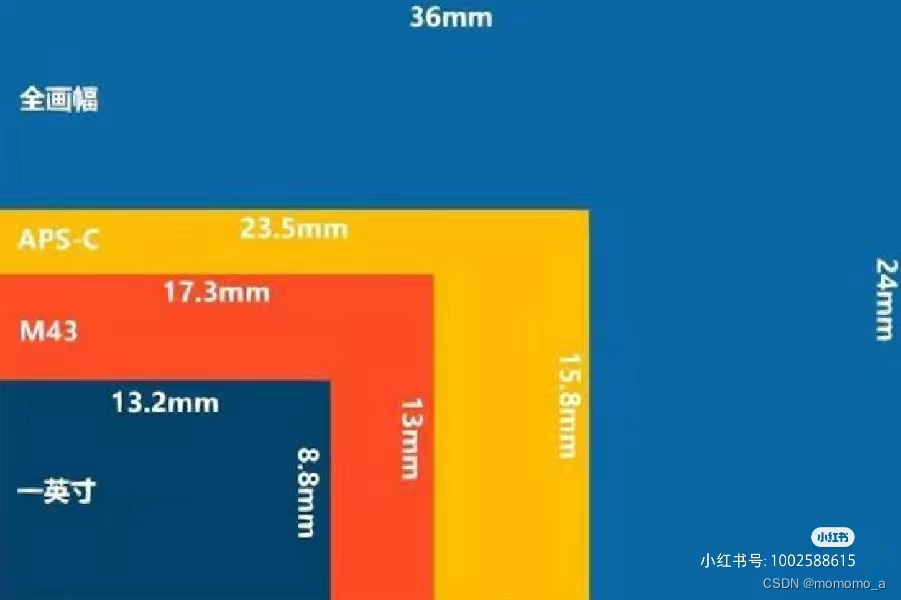
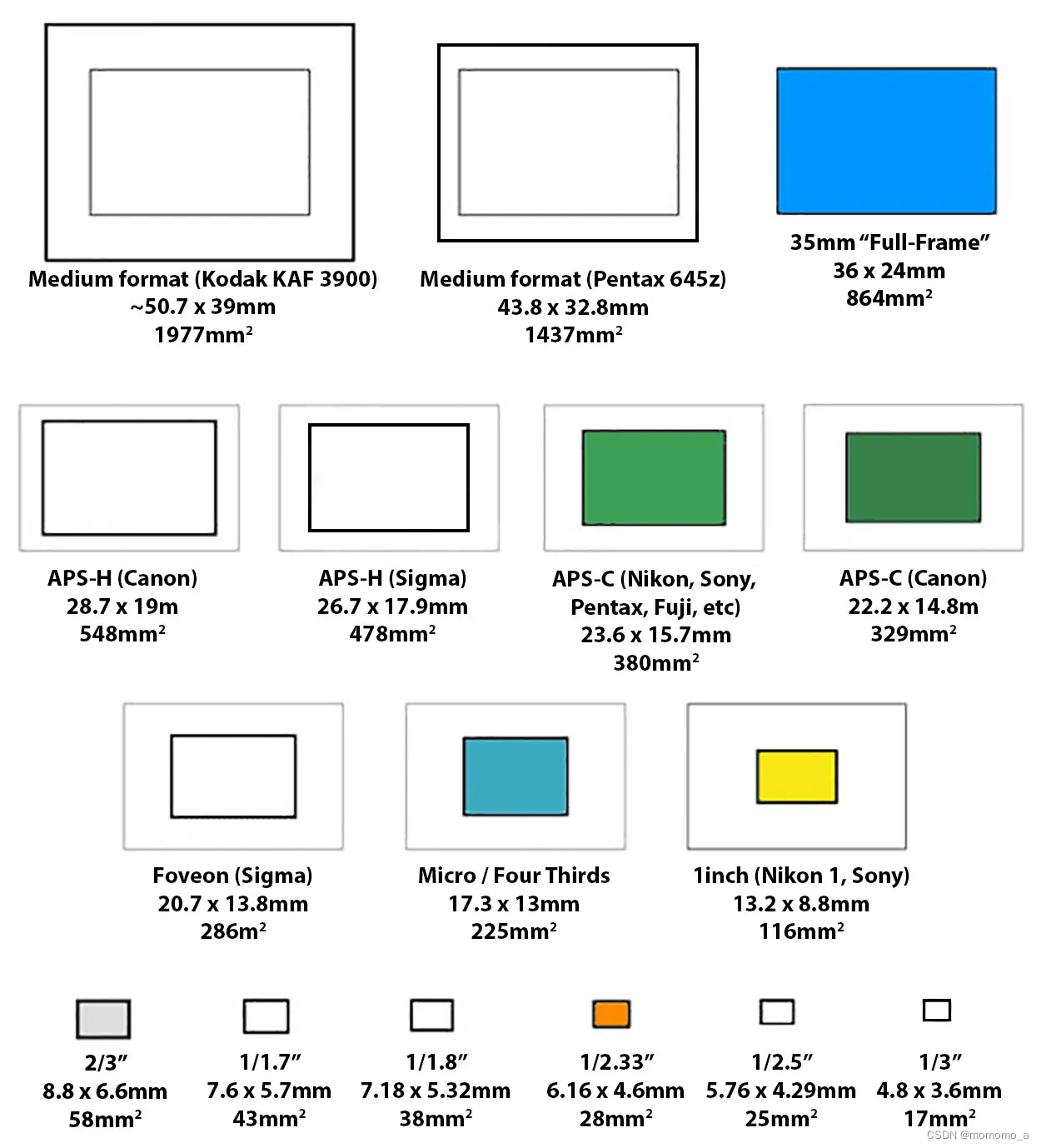
传感器的对角线长度即为实际成像圈的直径,有以下结论:
第一,对角线长度反比于等效焦距:
如m43画幅的对角线是全画幅的一半,对角线之比为1:2,则等效焦距为2:1。例如m43下的物理焦距50mm就等效全画幅下的物理焦距100mm。
第二,对角线长度正比于等效光圈,反比于f值:
如小米10Ultra的主摄靶面尺寸为1/1.32'',镜头的物理光圈为f/1.85。易得其主摄对角线长度约为(1/1.32)*16mm=12.1mm,相比于全画幅的43.3mm,对角线之比为0.28。可以得出小米10Ultra的等效全幅光圈为f/(1.85/0.28)=f/6.6。同样的,m43下的f/2.8即为全幅的f/5.6。
第三,对角线长度大致正比于图像信噪比:
传感器成像的噪点主要为散粒噪声,是由于量子涨落造成的光的物理性质。在同场景、同物理光圈、同样的观看大小下,传感器的对角线长度正比于散粒噪声的信噪比。比如全画幅的对角线是apsc的1.5倍,则信噪比大致为apsc的1.5倍,也就是一档光圈(1.4)左右。这也是apsc的高感比全幅差了一档左右的根本原因。
从上面这三个结论我们可以得出为何“底大一级压死人”:更大的等效光圈、更高的信噪比、裁切后可替代小底(虽然小底有长焦优势)。
2.解析度
微单相机通常具有较高的分辨率,以提供细节丰富的图像。常见的解析度包括2000万像素、3000万像素甚至更高。
3.镜头系统
微单相机使用可更换镜头系统,允许摄影师选择不同种类的镜头以适应各种摄影需求。微单相机通常使用镜头卡口系统,如索尼E卡口、富士X卡口、尼康Z卡口等,这些卡口系统有着丰富的镜头选择。
4.自动对焦系统
微单相机通常配备快速、准确的自动对焦系统,使用相位检测或混合对焦技术,以追踪运动主体并确保清晰焦点。
5.连拍速度
微单相机通常具有较快的连拍速度,可以拍摄多幅图像,适应快速运动的场景,有助于捕捉瞬间的动作。
6.电子取景器(EVF)
由于没有光学取景器,微单相机通常配置了电子取景器(EVF)。EVF可以显示实时的图像预览和设置信息,让摄影师能够更好地预览拍摄效果。
7.触摸屏和倾斜LCD显示屏
现在的微单相机通常配备触摸屏和倾斜式LCD显示屏,使拍摄变得更加便捷和多角度。
8.视频功能
许多微单相机具备优秀的视频功能,支持高清和4K视频录制,有时还具备高帧率和影片模拟的功能。
9.Wi-Fi和蓝牙连接
微单相机通常内置Wi-Fi和蓝牙功能,方便用户与智能手机或其他设备进行无线连接,实现图像传输、远程控制等功能。
这篇关于摄影入门 | 微单相机的常见参数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




