本文主要是介绍智能反射面论文1,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
来源:https://ieeexplore.ieee.org/document/9367569
D. Dampahalage, K. B. Shashika Manosha, N. Rajatheva and M. Latva-aho, “Intelligent Reflecting Surface Aided Vehicular Communications,” 2020 IEEE Globecom Workshops (GC Wkshps, Taipei, Taiwan, 2020, pp. 1-6, doi: 10.1109/GCWkshps50303.2020.9367569.
RIS辅助车辆通信
摘要
考虑上行链路中利用IRS的可实现速率最大化问题,在IRS信道估计方面有很多挑战,本文提出两种方案减少IRS的信道估计开销,一种方法是使用反射元件的分组,另一种是根据设备的位置进行无源波束成形。数值模拟,RIS可以给现有通信带来明显改善,此外,使用基于光线追踪的模拟来验证使用IRS的好处。
introduction
大多关于IRS的理论工作都假定,在发射器到IRS和IRS到接收器的信道中,IRS有完美的CSI,由于IRS由无源元件组成,信道估计具有挑战性。【5】提出两种可用信道估计方案:作者认为IRS除了无源元件外还有一些有源元件,这些有源元件可以用来测量信道。第一种方法:用压缩感知技术,从稀疏的测量中构建完整的CSI。第二种方法:深度学习模型训练与入射信号互动。
为实现智能交通系统(ITS)的概念,已对车辆通信网络进行了广泛的研究【8】,各种车辆应用都考虑在内,包括面向安全、舒适和娱乐的应用【9】,这些应用给现有的通信和网络技术带来巨大的挑战。数据密集型传感器的引入,如激光成像检测和测距,导致车辆通信网络必须支持Gb/s的数据速率【9】.如此高的数据速率需要大的系统带宽,这就促使人们利用毫米波进行车辆通信,该频段具有较大的带宽。【9】.但毫米波有较高的路径损耗。因此降低了传输范围。【10】提出了IRS克服这些挑战。
IRS在信道估计方面带来的新挑战,在车辆网络的高移动性方面也是如此。估计每个反射路径的信道系数需要很大的开销。
本文在毫米波车辆通信系统中使用IRS,尽管【13,14】中已经考虑了IRS辅助系统的速率最大化问题。就作者所知,这是第一个考虑车辆通信问题的工作。本文使用基于逐次细化的算法【7】优化IRS相移。提出两种IRS相位优化方案,以减少信道估计的开销,并促进大型反射元件的分组。另一种方法是利用其位置的无源波束成形。数值模拟,使用IRS,可实现速率显著提高,此外,作者用商业射线追踪工具Wireless InSite【15】评估了系统在移动性下的性能。
system model and problem formulation
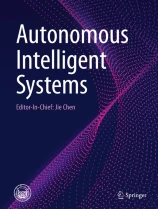
考虑一个M根天线的BS和单根天线的车辆组成车辆网络,关注上行链路,一个具有N个反射元件的IRS用来协助通信。Hr属于C(MN)表示IRS和BS之间的信道,hv属于C(N1 )表示车辆和IRS之间的信道,hd属于C(M*1)表示车辆和BS之间的信道。考虑相移是L个离散level,为简单起见,假设这些相移取通过均匀量化间隔【0,2pi)获得的值之一,因为,每个反射元件出的离散相移几何由下式给出:

设IRS第i个反射元件的相移为 θi 属于 F。定义IRS的反射矩阵为Θ
设 x 为车辆传输的信息承载符号,在BS处接收的信号为


是基站天线的复加性高斯白噪声,BS应用线性波束成形向量w来解码x,即
为简单起见,假设在BS处最大比合并MRC波束形成,
对于P的发射功率,SNR可以被写成:

使用(4)中的SNR表达式,可实现速率表示为:
从(5)可以看出,可实现的速率取决于IRS的反射矩阵,因此适当调整反射矩阵可实现更高速率,这称为被动波束形成或相位优化,考虑IRS相位优化问题,通过选择最优的离散相移来最大化可达速率:
alcorithm development
由于离散相移,(6)中的优化问题是非凸的,如果硬解,有N^L中可能性,对于大型反射阵列 是不可行的,通过扩展信道增益表达式,提出基于连续细化算法【7】。定义

信道增益由下式给出:

我们关注单个反射元件,vn考虑所有其他反射元件(vi , i 不等于n)是固定的,可以将信道增益写为:

Aij和bi分别表示A和b的各个元素。
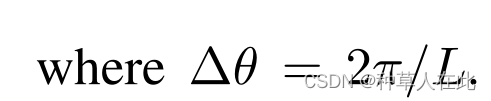
基于(8)中的信道增益表达式,可以通过匹配反射阵列相移vn和kn的相位来最大化信道增益。对于离散相移,可以如算法1【7】中所给出的逐次精化算法,ε 是收敛的停止阈值。
为了执行被动波束形成,需要估计所有涉及的所有信道,除了车辆和BS之间的直接信道外,IRS的大量反射元件给信道估计带来极大挑战,接下来,提出两种可以遵循以减少信道估计开销的相位优化方案。
A. 基于分组的IRS相位优化
将反射阵列划分为子组,并按子组执行相位优化,子组中的所有元素被视为单个元素。因此,只需要估计每组的信道,而不是所有反射元素的信道。此外,还可以运行考虑子组的阶段优化算法,而不需要遍历所有单独的元素。
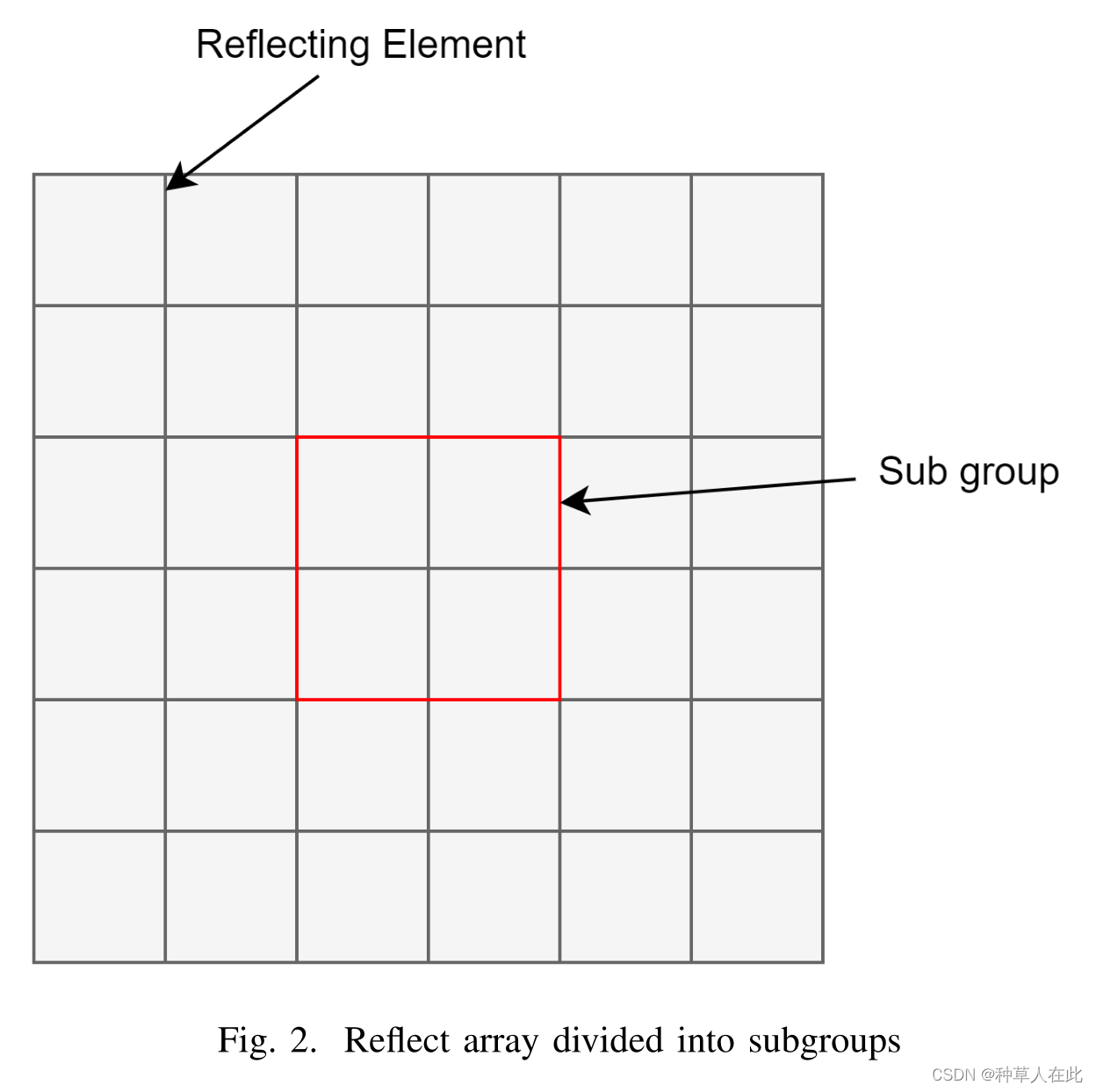
例如,图2显示66反射阵列,被分为22大小的亚群,每个子群被认为是单一的反射元件,因此,有效地实现3*3反射阵的被动波束形成。这降低了信道估计开销,降低了逐次求精算法的复杂度,在找到相移之后,将该组中所有反射器的相移值设置为该子组的相移值。
B. 基于位置的无源波束形成
IRS中的一个反射元件捕获输入信号,并将其向各个方向重新散射【16】,有效路径损耗是通过IRS的单个链路的路径损耗的乘积。因此IRS辅助系统可以在车辆到BS的链路较弱而通过IRS的链路具有较强的LOS的情况下获得好处。由于在这种情况下,视距链路是突出的,因此可以基于设备的位置进行被动波束形成。网络将跟踪设备的位置以及出发和到达的角度。然后,在天线尺寸已知的情况下,可以重建信道矩阵。
假设BS和IRS处是平面阵列,BS和IRS之间的LOS信道可以表示为: 其中 d 表示BS和IRS之间的距离。
其中 d 表示BS和IRS之间的距离。
是BS考虑方位角和仰角到达角的阵列响应。
为所考虑的方位角和仰角出发角下IRS的阵列响应。相似的,hv,los和hd,los可类似定义,该系统根据估计的站线信道进行被动波束形成。在这里,我们只需要估计整个反射阵列的到达和离开角度,然后基于天下尺寸的先验知识重构信道矩阵,这比估计单个反射元素的信道开销更少。
numerical results
首先给出了静态条件下的随机模拟结果,随后,提出了基于光线跟踪的模拟结果,使用InSite【15】,也考虑了移动性,载频24.2Ghz
A. 随机模拟
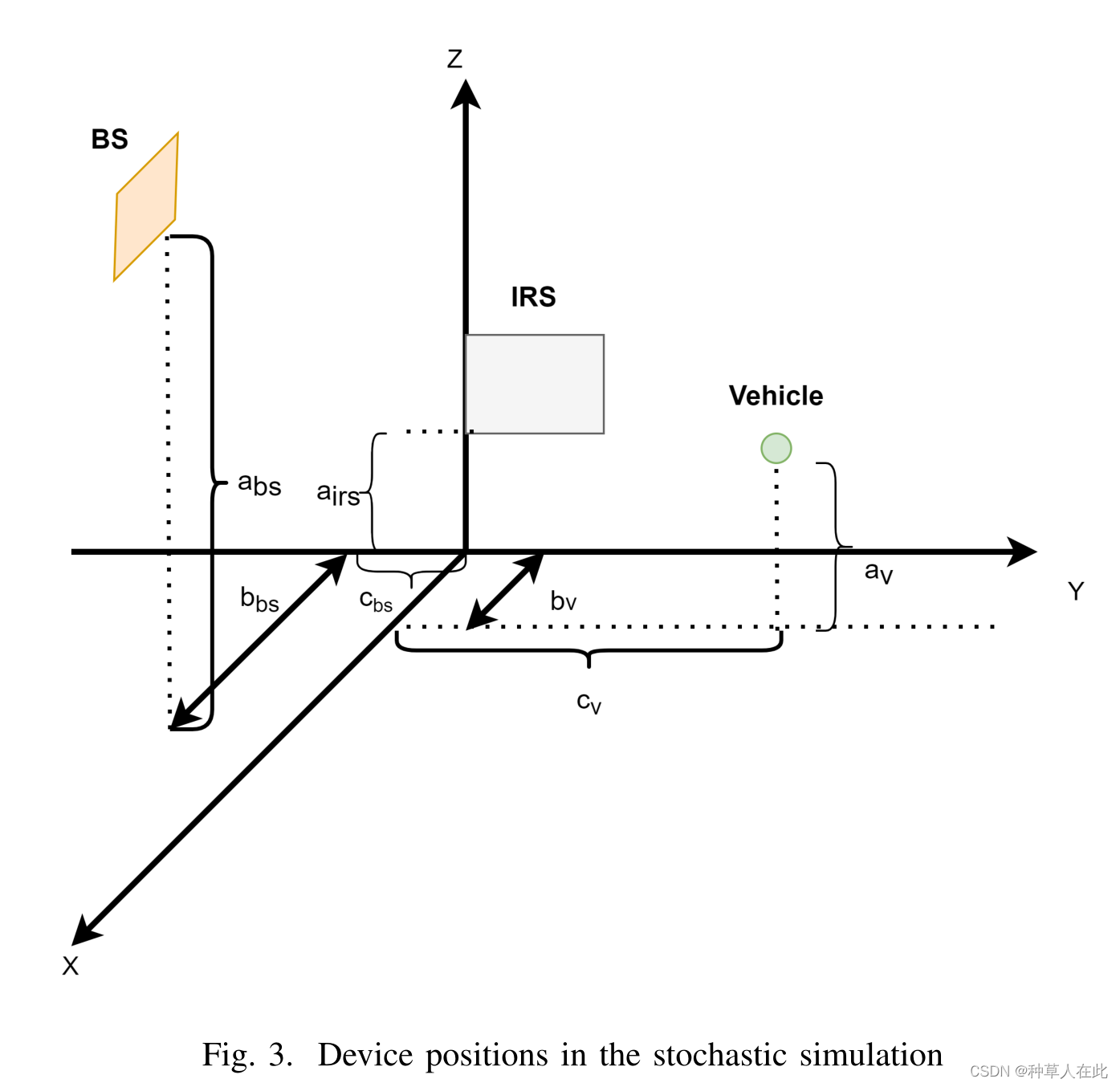
BS为一个42均匀平面阵列UPA天线面板,IRS是一个1616反射元件的平面反射阵列,车辆有一个单天线,IRS放置在Y-Z平面上,高度为1m,BS被放置在X-Z平面,高度2m ,bbs = 20m,cbs = 10m ,车载天线放置高度av = 1m,bv = 1.5m ,cv是距离原点。所有涉及的信道都采用一个莱斯衰落信道模型,路径损耗模型采用3Gpp路径损耗模型【17】,βr=2 IRS-BS链路,βv = 1 车到IRS链路,βd = ∞ 表示直接链路。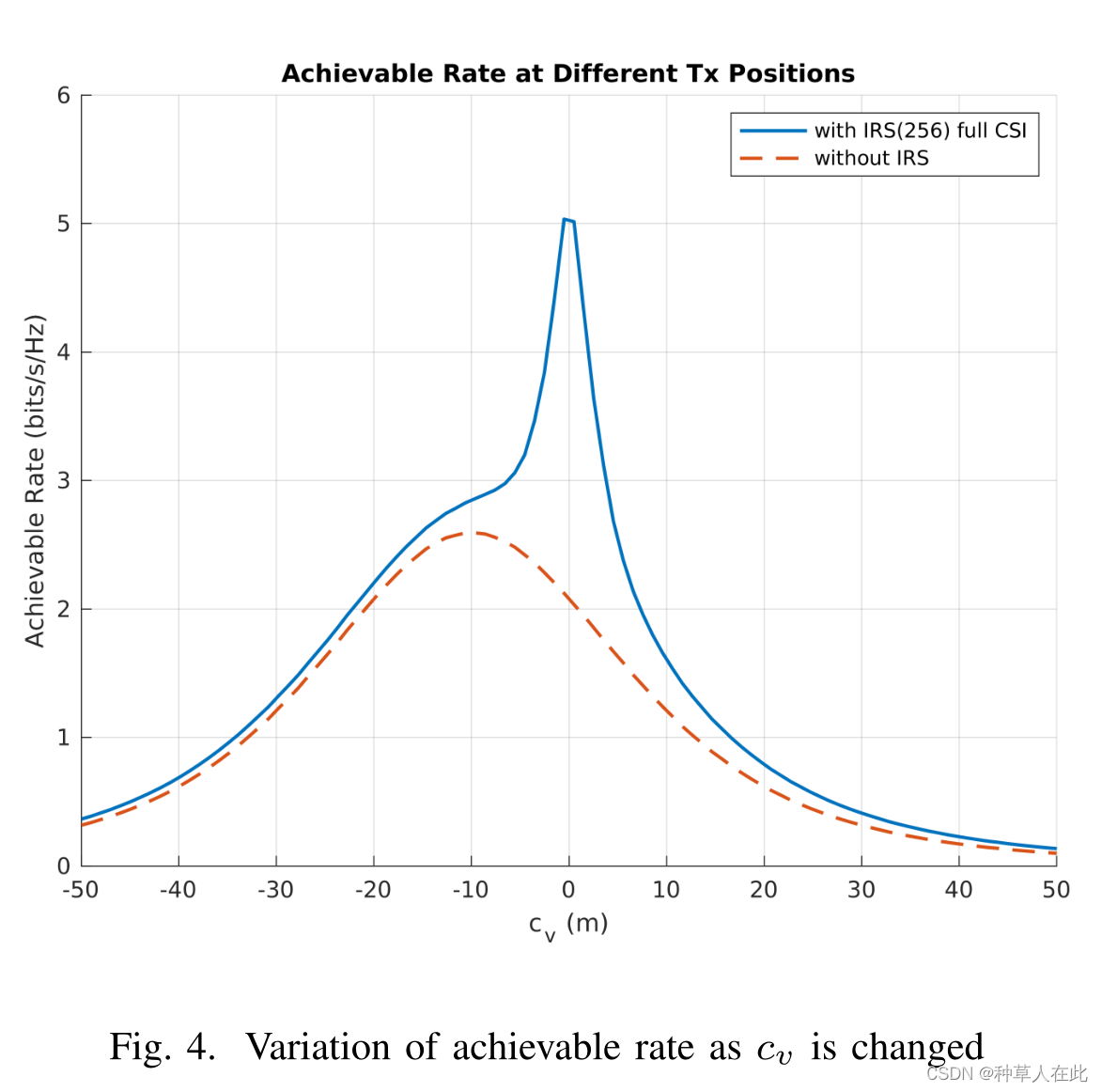
图4显示当我们改变cv来改变车辆的位置时,可达速率的变化情况,当车辆接近IRS时,IRS给出了一个显著的增长率,在最近点cv= 0处速率最高,当车辆离IRS越远时,增益就下降了。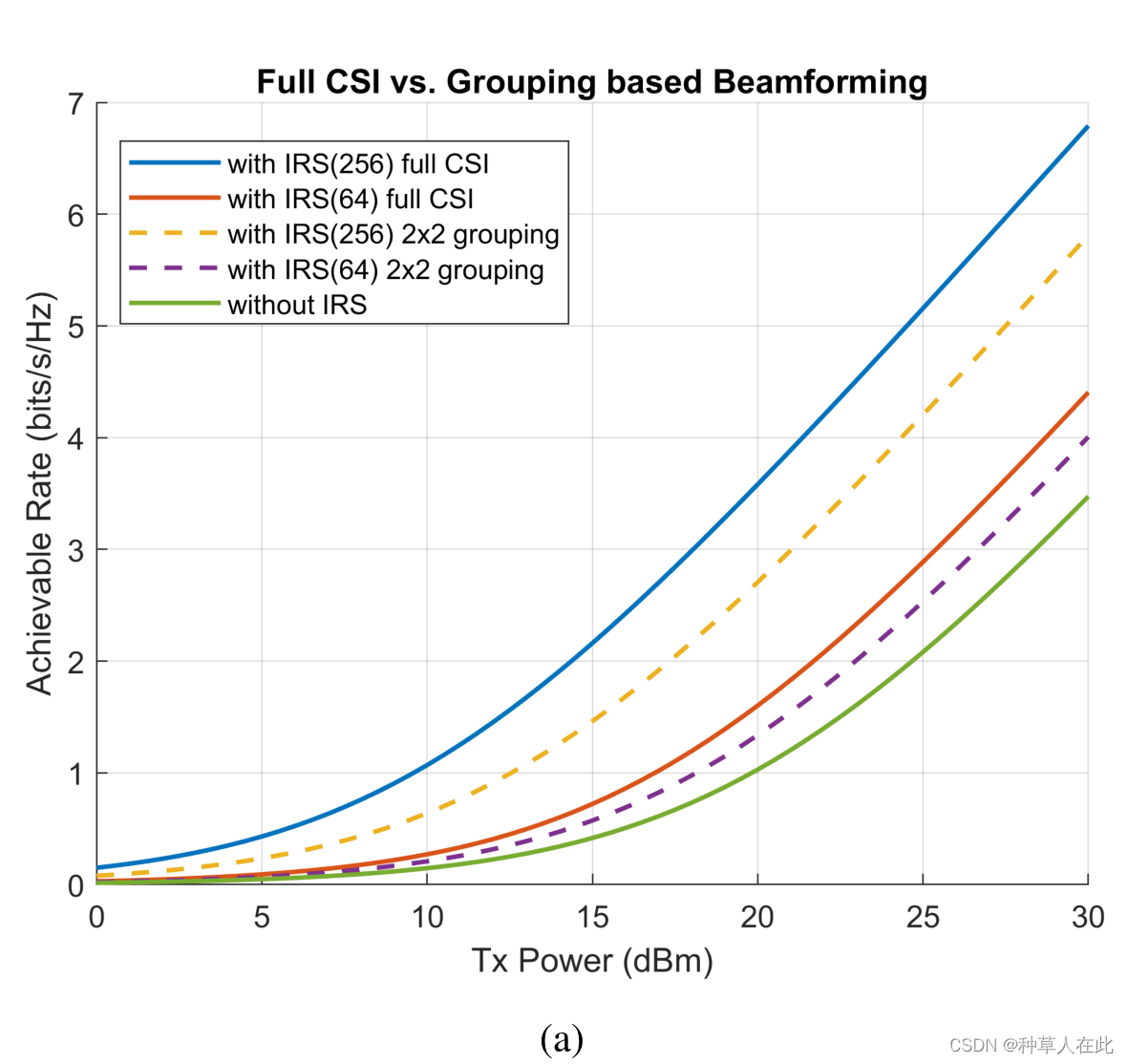
将车辆位置固定在距离IRS最近的点,即cv=0,比较了反射阵列尺寸为1616和88时,在改变发射功率的情况下所能达到的速率,图5(a)比较了基于子组的相位优化,当使用分组时,性能有所下降,然而,与没有IRS的系统相比,性能有所提高。当1616反射阵列与22分组使用时,它在无源波束成形方面有效充当了88面板,它比使用全CSI的88反射阵列具有更好的性能。因此,分组为利用大反射阵列具有更好的性能。因此,分组为利用大反射阵列提供了一种可行的方法,减少了信道估计的开销。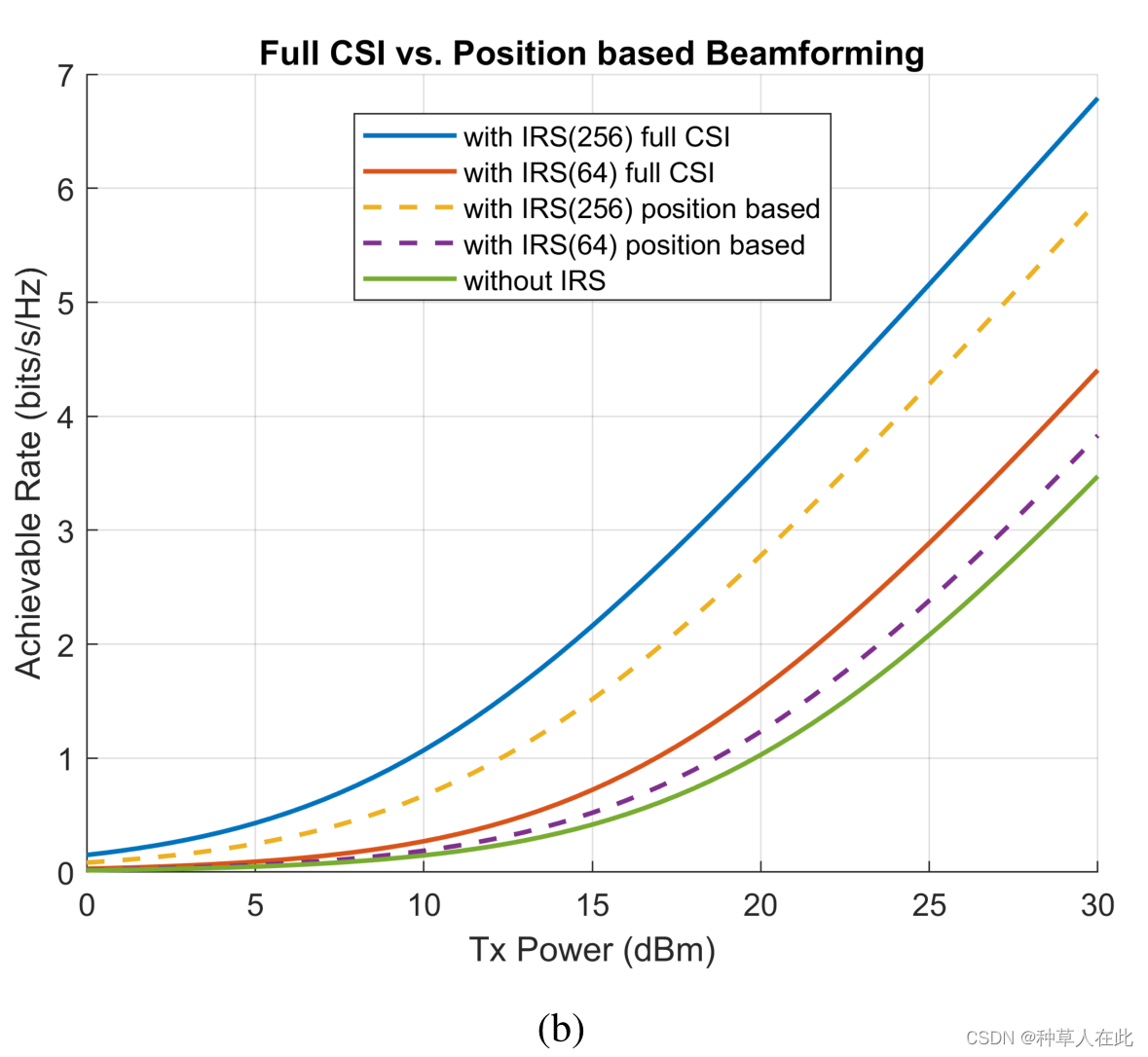
图5(b)比较了基于位置的相位优化,与完全CSI可用时相比,此方案的性能也有所降低,与没有IRS的系统相比,它可以显著提高1616反射阵列的速率,然而88反射阵列的速率与没有IRS的速率曲线非常接近,这表明基于位置的波束形成更适合大型反射阵列。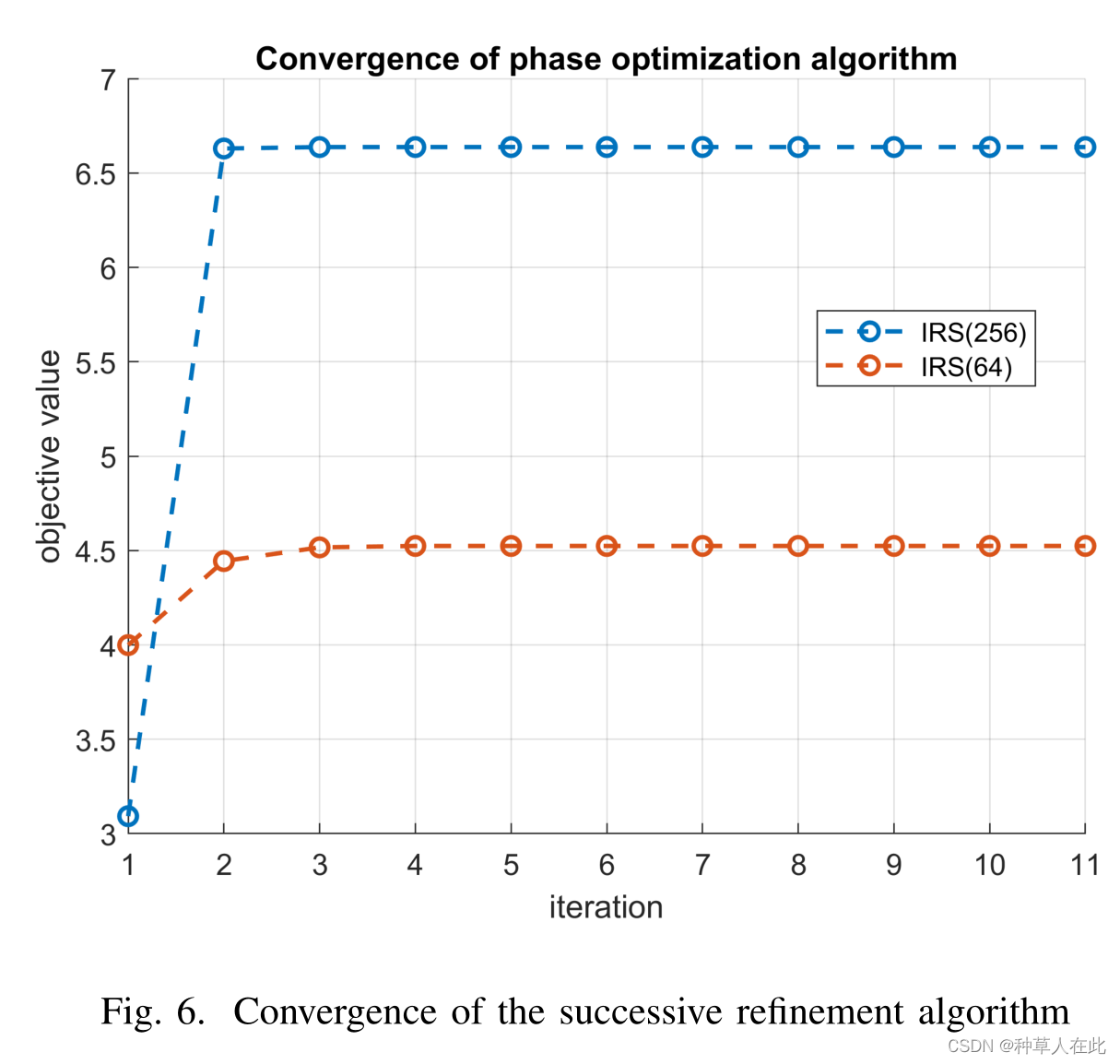
逐次求精算法的收敛性如图6所示,该算法对于88和1616反射阵列都收敛得很快,在这里,已经将相移得初始值设置为0(θi=0,i = 1,2,。。。N)
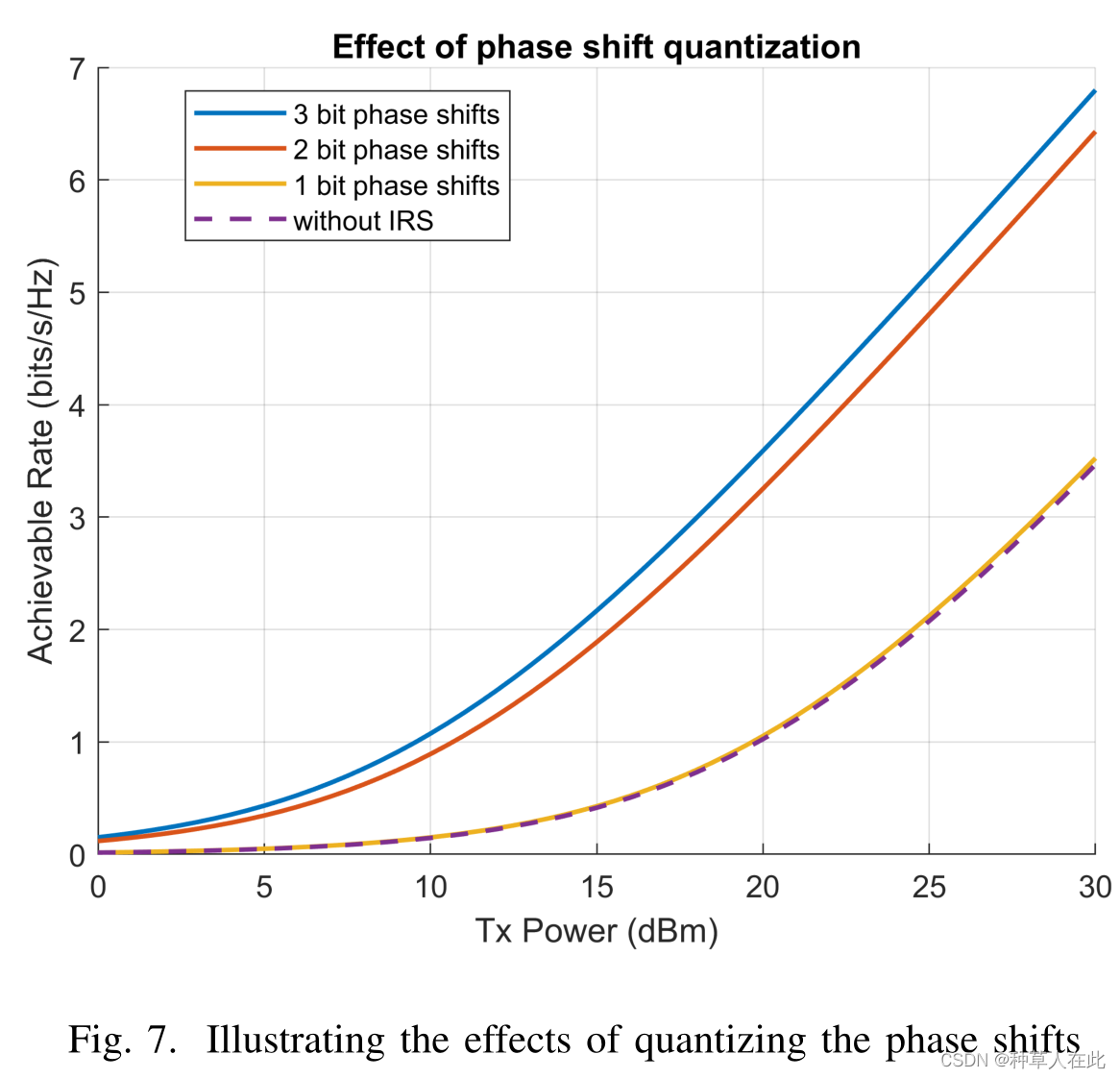
图7说明离散化相移得效果,在没有IRS得情况下,1bit相移几乎没有比现有通信带来任何好处,当将离散相移电平增加到2bit时,性能显著提高,当进一步将量化bit数增加到3时,性能增益并不是那么显著。我们可以得出结论,即使是2位相移的反射阵列也足以改善现有的通信,这是有益的,因为IRS得实际实现只能支持有限数量得相移电平。
B. 基于光线追踪的模拟
上一节的随机模拟提供了IRS辅助系统的一些见解,它们依赖于简化的假设,也没有考虑流动性,我们需要一个更复杂的模拟来详细模拟机动性和环境条件,射线追踪被认为是估计毫米波车载网络复杂传播特性的可靠方法。IRS辅助系统在Remcom Wireless InSite【15】中建模,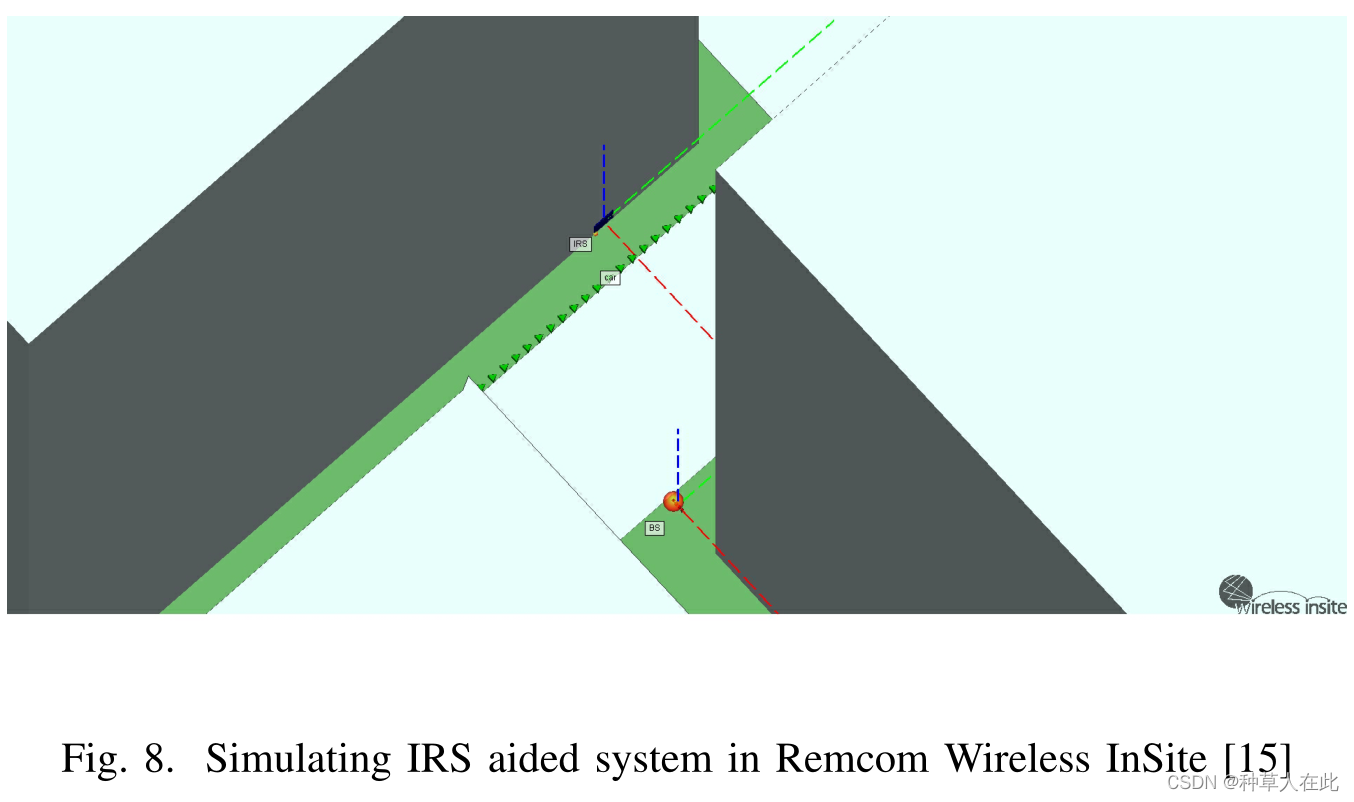
如图8所示,IRS被建模为贴片天线的矩形阵列,在车辆中定义发射机的路线,平均速度为10m/s,该系统正在模拟一个有建筑物和道路的环境,BS位于道路的一侧,车在路的另一边行驶,IRS被放置在更靠近路径的地方,为简单起见,不考虑车辆交通,利用光线跟踪仿真得到了信道矩阵,并进行了相位优化,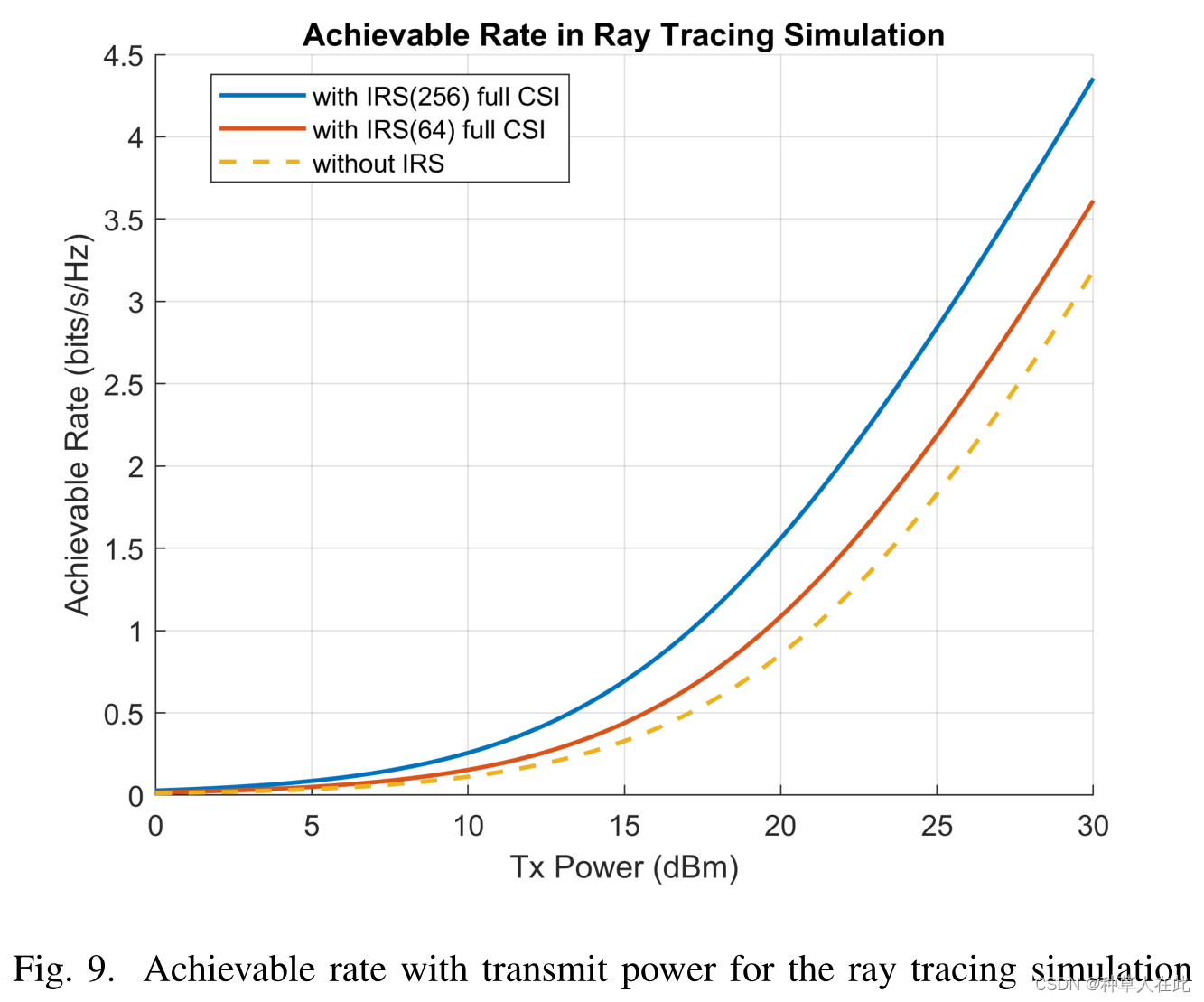
图9为反映88和1616阵列尺寸的可达速率图,我们考虑车辆距离IRS最近的点,并计算了改变发射功率时的速率,1616反射阵列的速率显著增加,88反射阵列近比没有IRS的现有通信提供了轻微的改进,这表明。需要较大的反射阵列来显著提高系统性能。
conclusion
基于光线追踪的模拟用于验证在车辆网络中使用IRS的好处,提出两种被动波束形成方案来降低信道估计开销,通过基于随机信道模型的数值模拟比较了这些方法的性能,结果表明,这些方案提供了现有通信的显著改进,它们提供了利用大型反射阵列的实用方法。
这篇关于智能反射面论文1的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!