本文主要是介绍GAMP源码阅读(上)主要类型、后处理流程、RINEX文件读取,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
- 一、GAMP 简介
- 1、程序概述
- 2、工具箱介绍
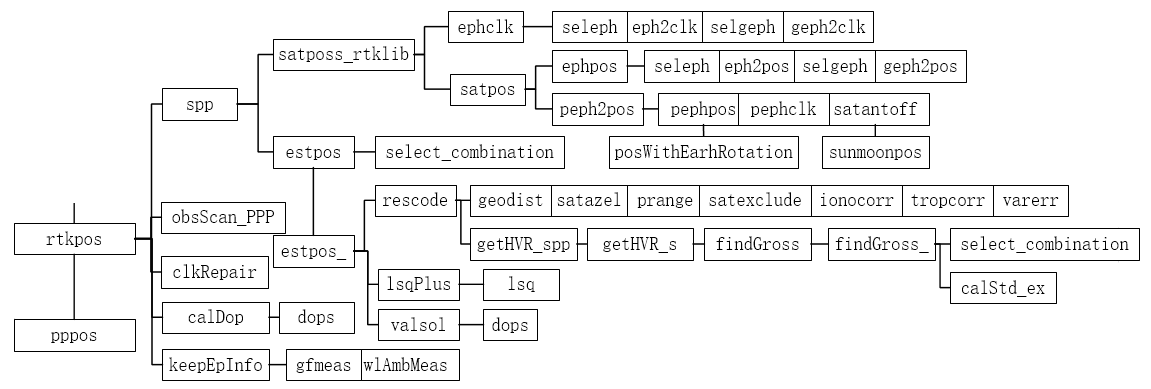
- 3、函数调用关系
- 4、程序执行流程
- 二、基础类型定义
- 1、宏定义
- 2、结构体定义
- 3、矩阵、向量、最小二乘、卡尔曼滤波
- 4、时间和字符串
- 5、坐标系统
- 6、卫星系统、观测值
- 7、配置选项
- 三、后处理
- 1、main()
- 2、proccfgfile():处理配置文件
- 3、procOneFile():处理单个观测值文件
- 4、gampPos():开始后处理
- 1. setcodepri():设置信号优先级。
- 2. outhead():输出结果文件头
- 5、excses():执行后处理解算
- 1. sampledetermine():确定采样间隔
- 2. calCsThres():计算 MF、GF 周跳检测阈值
- 6、procpos():进行定位解算
- 1. BDmultipathCorr():北斗伪距偏差改正
- 2. obsScan_SPP():筛选出能进行 SPP 解算的观测值
- 7、rtkpos():逐历元解算
- 1. clkRepair():钟跳修复
- 2. obsScan_PPP():筛选出能进行 PPP 解算的观测值
- 3. calDop():调用 dops() 计算各种 DOP 值
- 4. dops():计算各种 DOP 值
- 5. keepEpInfo():保存当前历元信息
- 6. gfmeas():计算 GF 几何无关组合观测值
- 7. wlAmbMeas():计算 WL 宽巷组合观测值
- 四、RINEX 文件读取
- 1、readobsnav():Rinex 文件读取主入口函数
- 2、readrnxfile():传入文件路径,读取起止时间内数据
- 4、readrnxfp():传入文件描述符,调用对应的读取函数
- 5、readrnxh():读取文件头
- 6、观测文件读取
- 1. decode_obsh():解析观测数据文件头
- 2. readrnxobs():读取o文件中全部观测值数据
- 3. readrnxobsb():读取一个观测历元的观测数据
- 4. decode_obsepoch():解码历元首行数据
- 5. decode_obsdata():读取一个历元内一颗卫星的观测值
- 7、星历文件读取
- 1. decode_navh()、decode_gnavh()、decode_hnavh()
- 2. readrnxnav():读取星历文件,添加到nav结构体中
- 3. readrnxnavb():读取一个历元的星历数据,添加到 eph 结构体中
- 8、钟差文件读取
一、GAMP 简介
1、程序概述
GAMP 全称 (GNSS Analysis software for Multi-constellation and multi-frequency Precise positioning),在 RTKLIB 的基础上,将一些多余的函数、代码简洁化,精简出后处理 PPP 部分,并对算法进行改进增强。简化后代码比 RTKLIB 原版还要简单,对初学者非常友好,在我接触过的导航定位开源程序中算是最简单的。使用也很方便,软件包里提供了 VS 工程,和组织好的配置文件、数据文件,简单改改文件路径就能算出结果。
2、工具箱介绍
-
MatPlot:
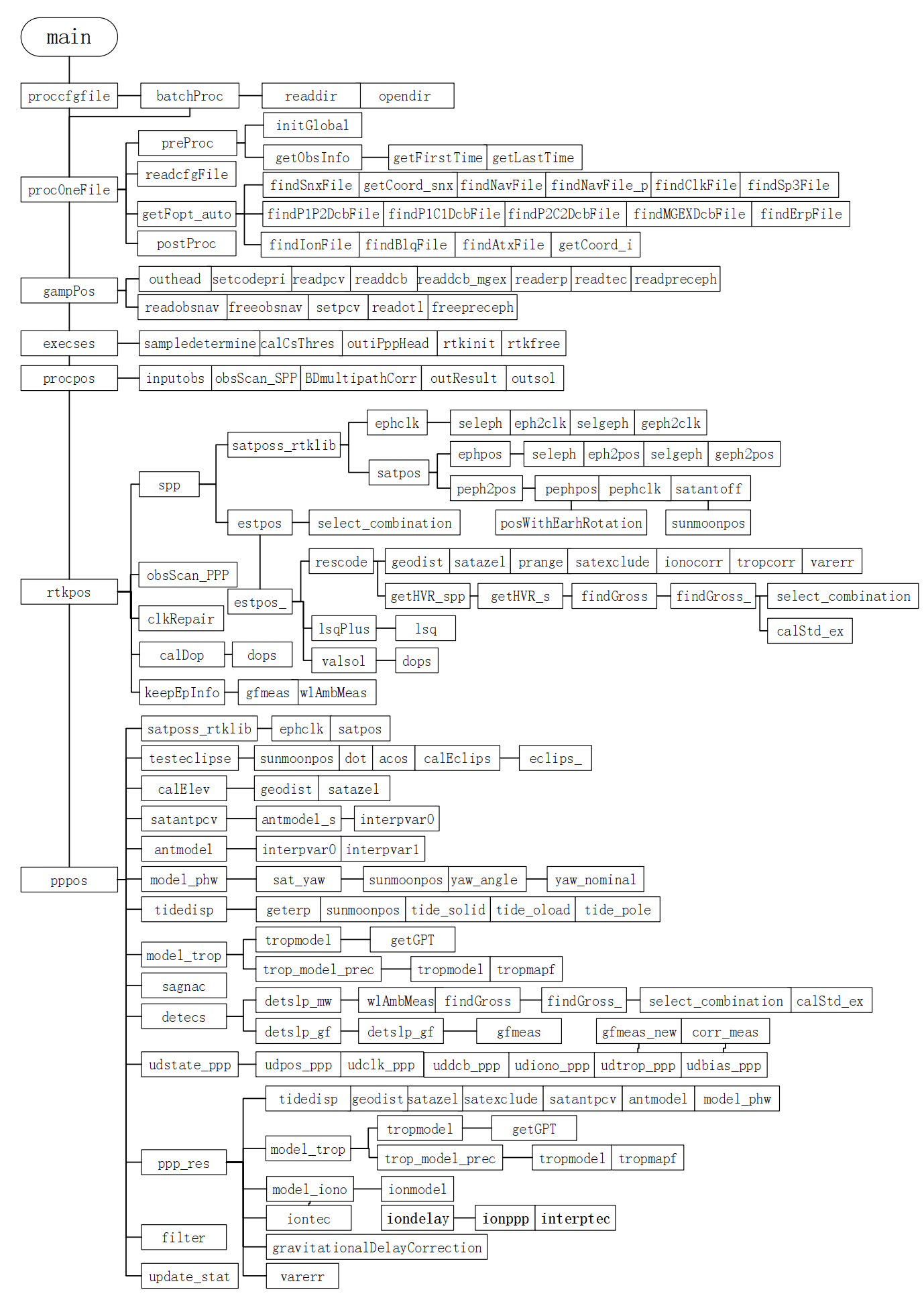
3、函数调用关系
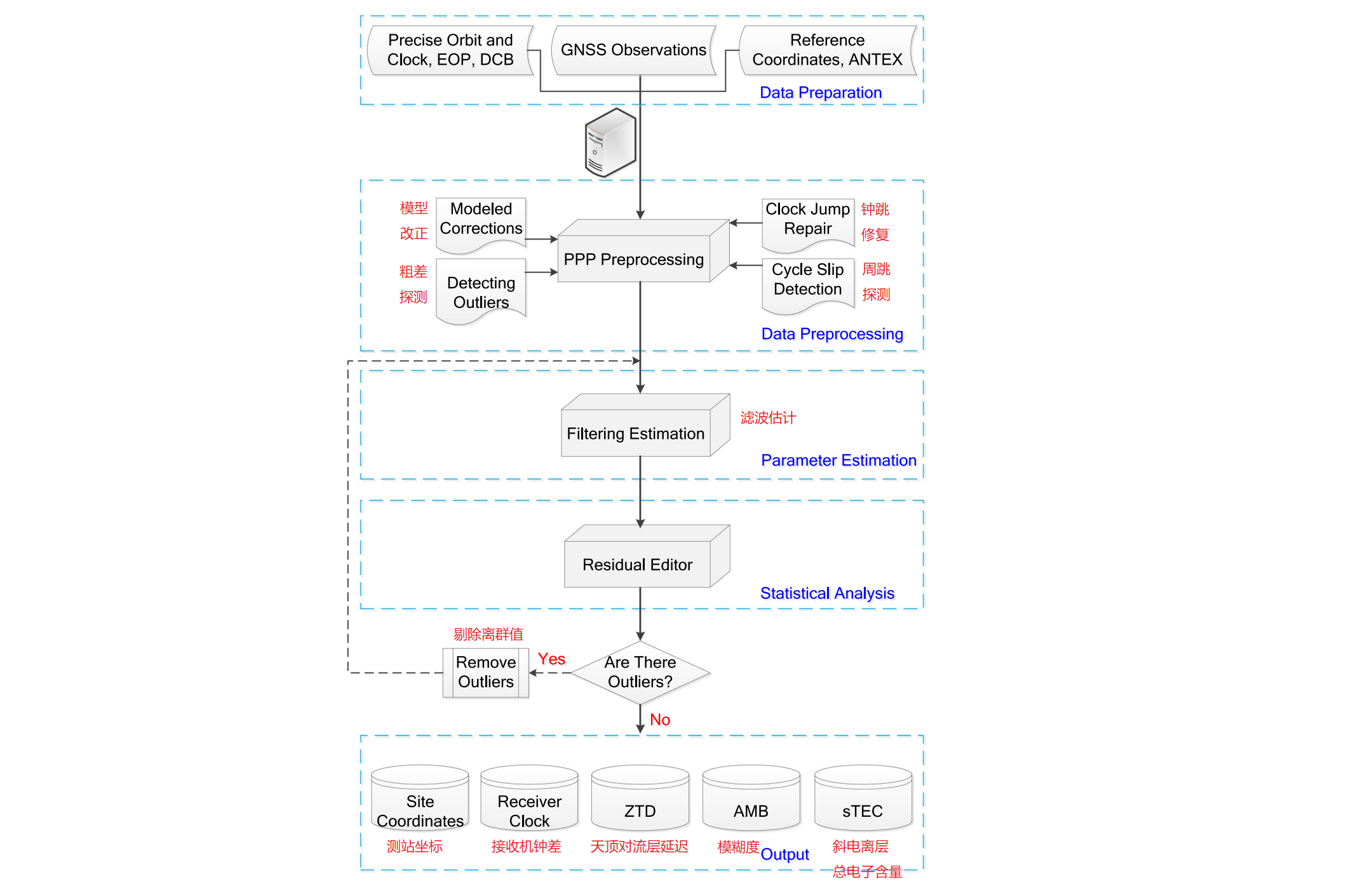
4、程序执行流程
二、基础类型定义
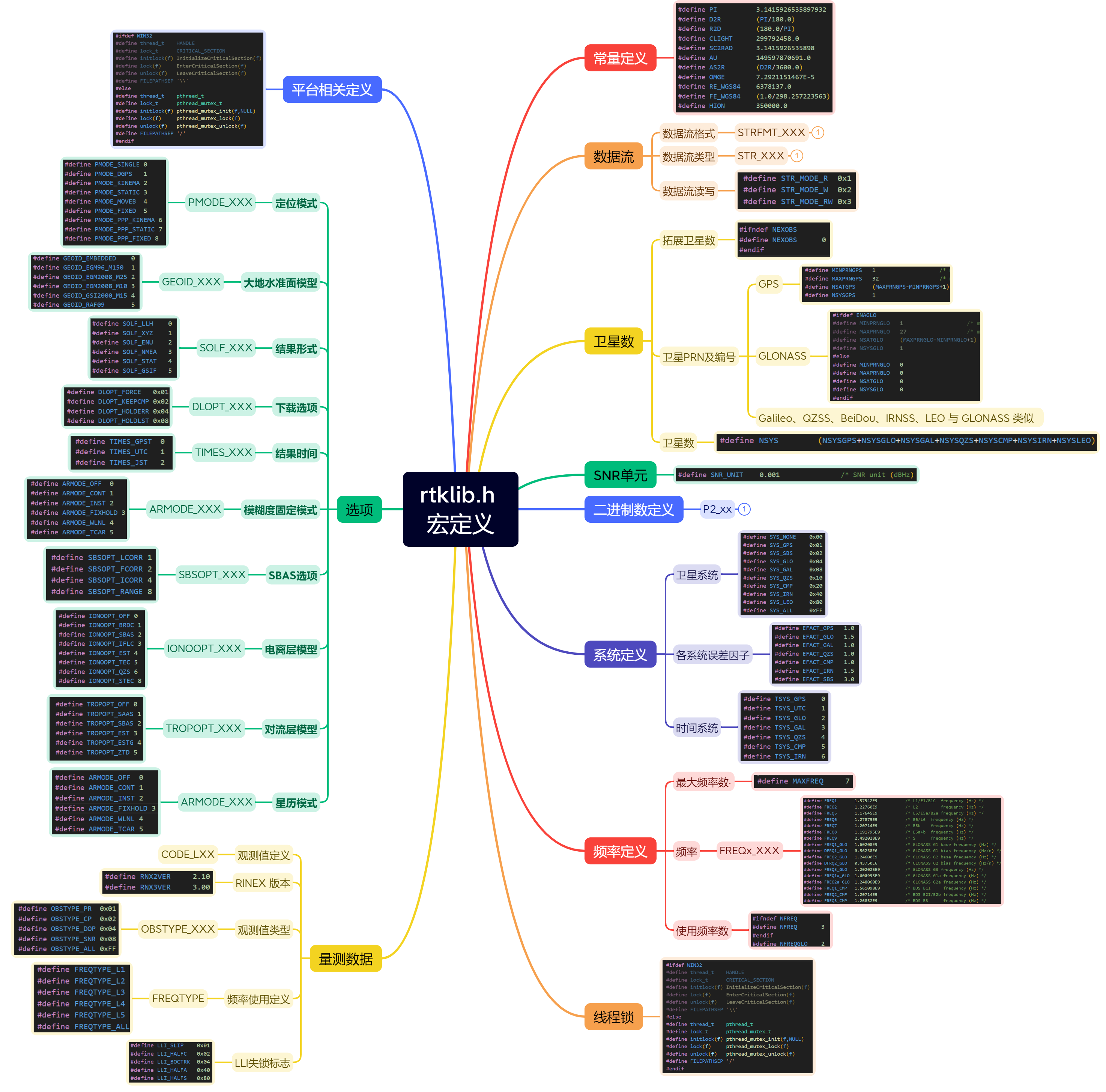
1、宏定义
大部分沿用 RTKLIB,做了少量拓展
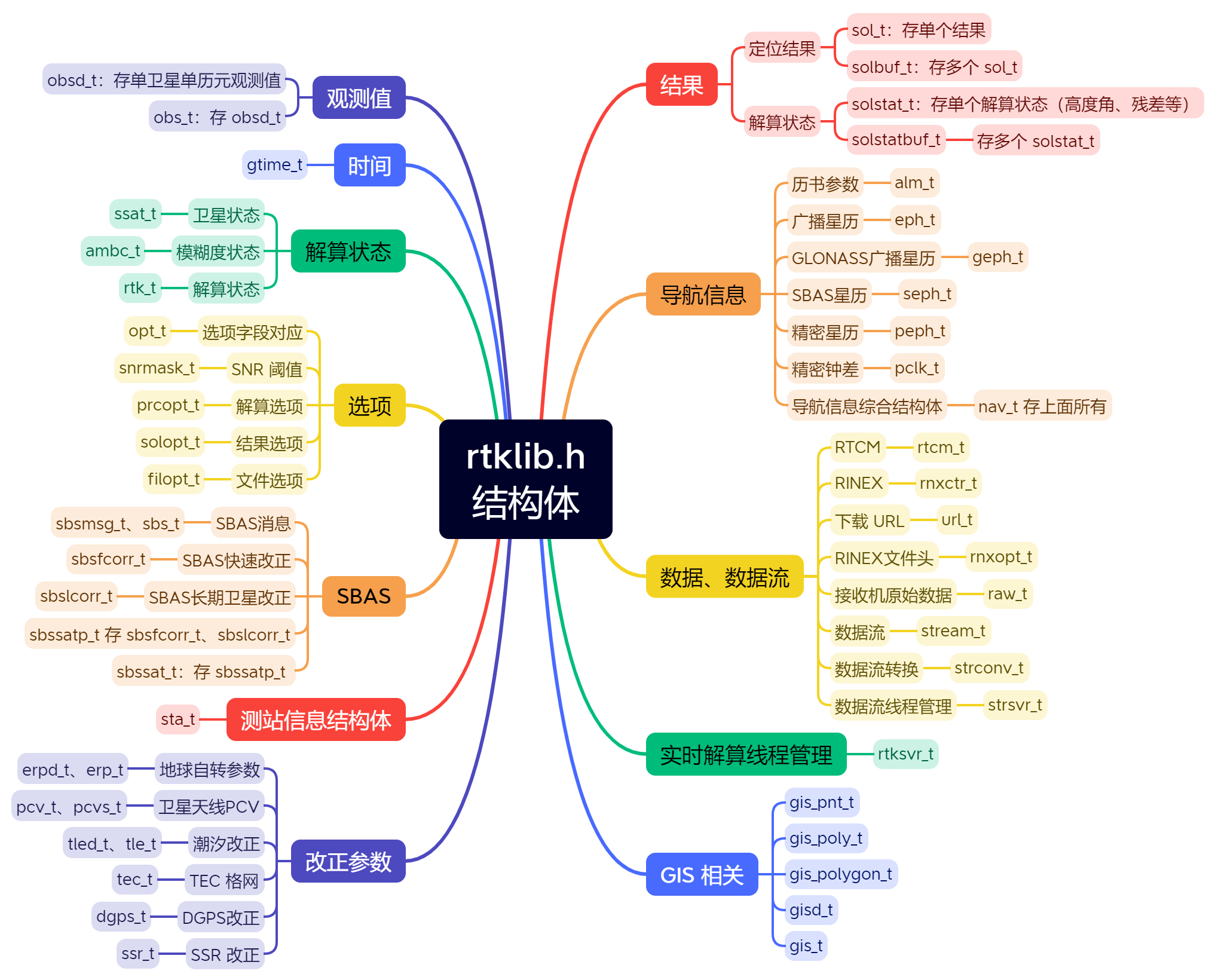
2、结构体定义
大部分沿用 RTKLIB,做了少量拓展
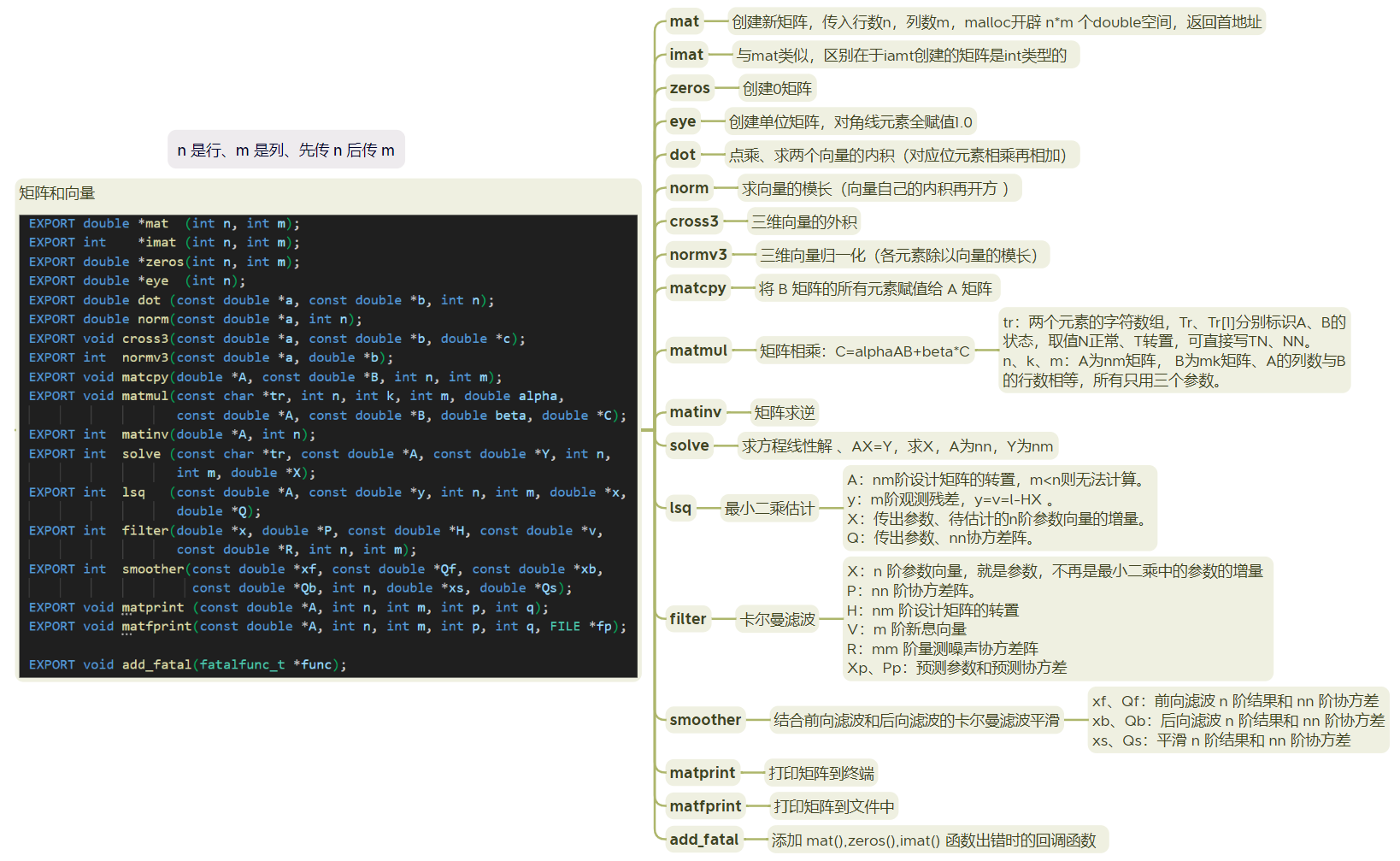
3、矩阵、向量、最小二乘、卡尔曼滤波
- GAMP 中用 double 类型一维数组表示矩阵,不能自动识别矩阵的行列数,每次传矩阵的时候都要传入行数 n、列数 m。
- 用矩阵的时候要先 malloc 开辟空间,用完记得 free 释放空间。
- 要能熟练计算矩阵加减乘除转置。
- 矩阵求逆用的 LU 分解法,时间复杂度 O 3 O^3 O3 ,对于大规模的矩阵,如果利用矩阵的稀疏性和对称性等特性,而且当使用不完全分解方法(例如,只计算到一定程度或使用截断技术)时,LU 分解的效率会更高。
matprint()很常用,调试的时候不好直接看的矩阵元素的值,得输出到终端或者文件再看。
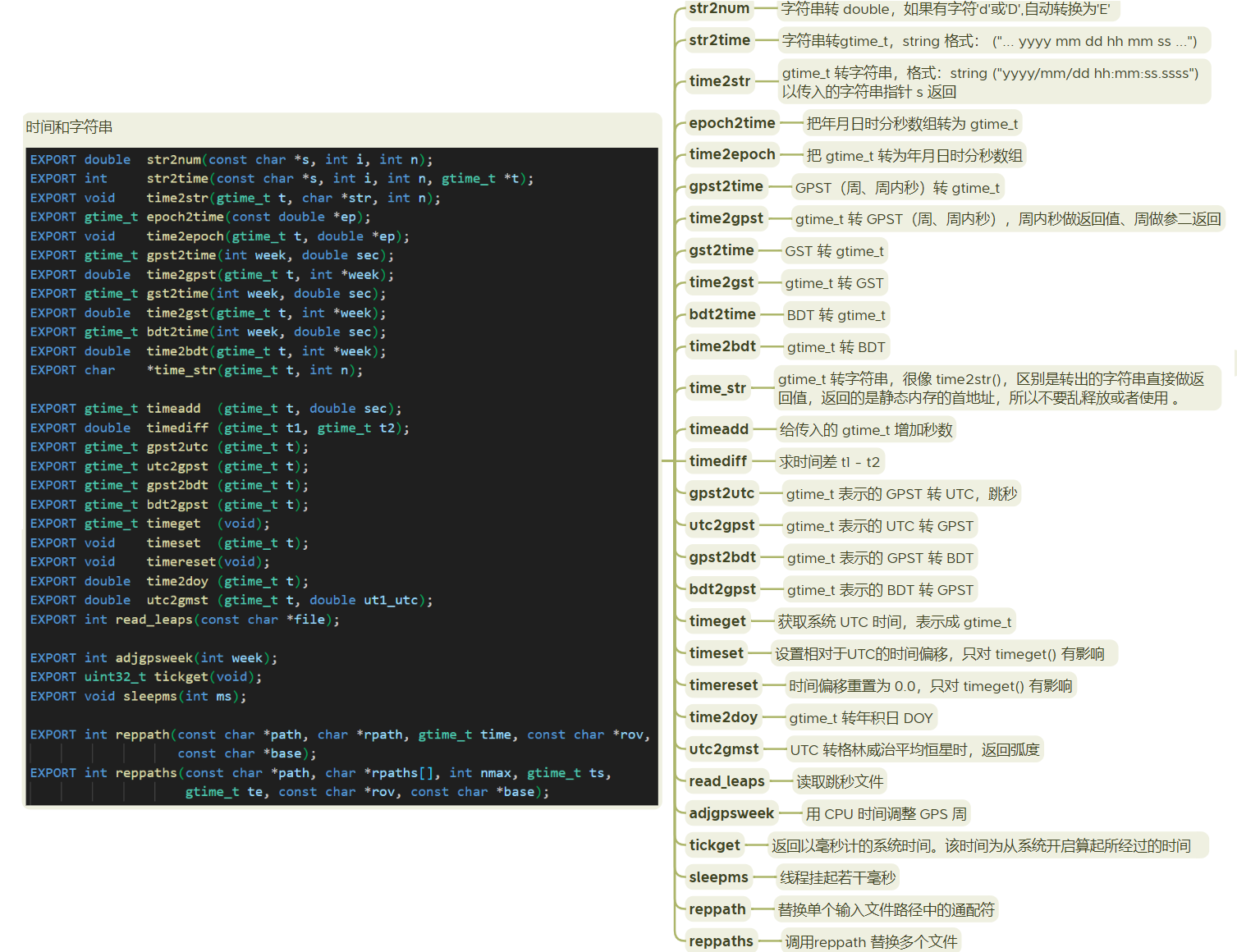
4、时间和字符串
- GAMP 中时间一般都以
gtime_t类型存储,为了提高时间表示的精度,分开存 GPST 时间的整秒数和不足一秒的部分。 - 经常需要做年月日时分秒、周+周内秒、GPST 三种时间之间的转换;想输出北京时间的时候要加 8 小时。
- BDT、GLONASST 不怎么用,读完文件就转为 GPS 时间了。
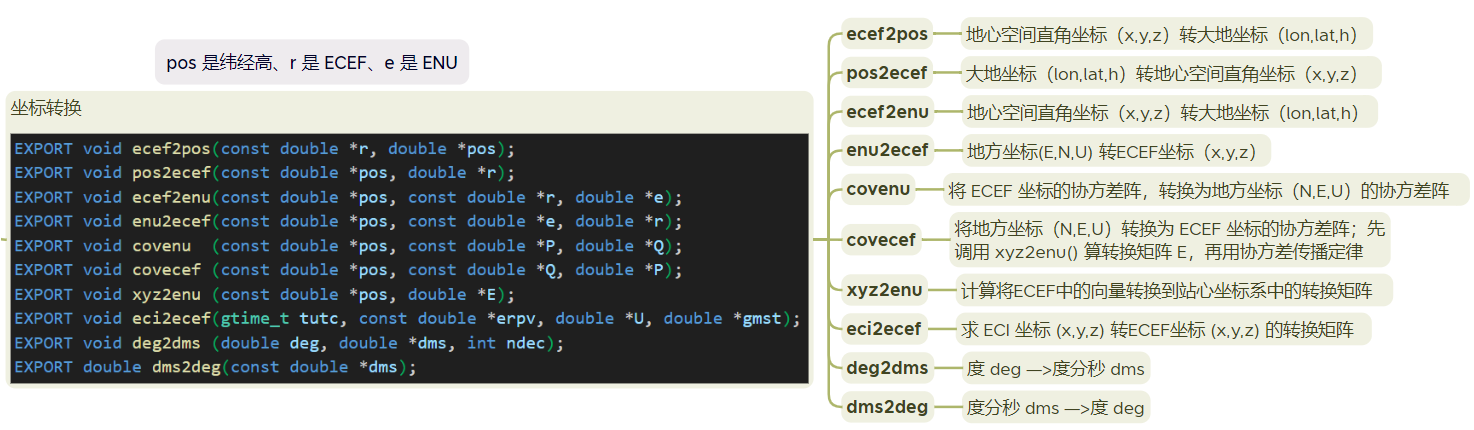
5、坐标系统
- ECI 用的很少,只在
sunmoonpos()函数中计算太阳月亮时候用到了,不用太关注。 - ENU、ECEF、LLH 三套坐标系都频繁使用,要熟练掌握他们直接的转换,包括协方差的转换
- ENU 是局部相对坐标系,以某一个 LLH 坐标为原点,坐标转换的时候要传入这个 LLH 坐标。
- ENU 常用
e表示、ECEF 常用r表示、LLH 常用pos表示。
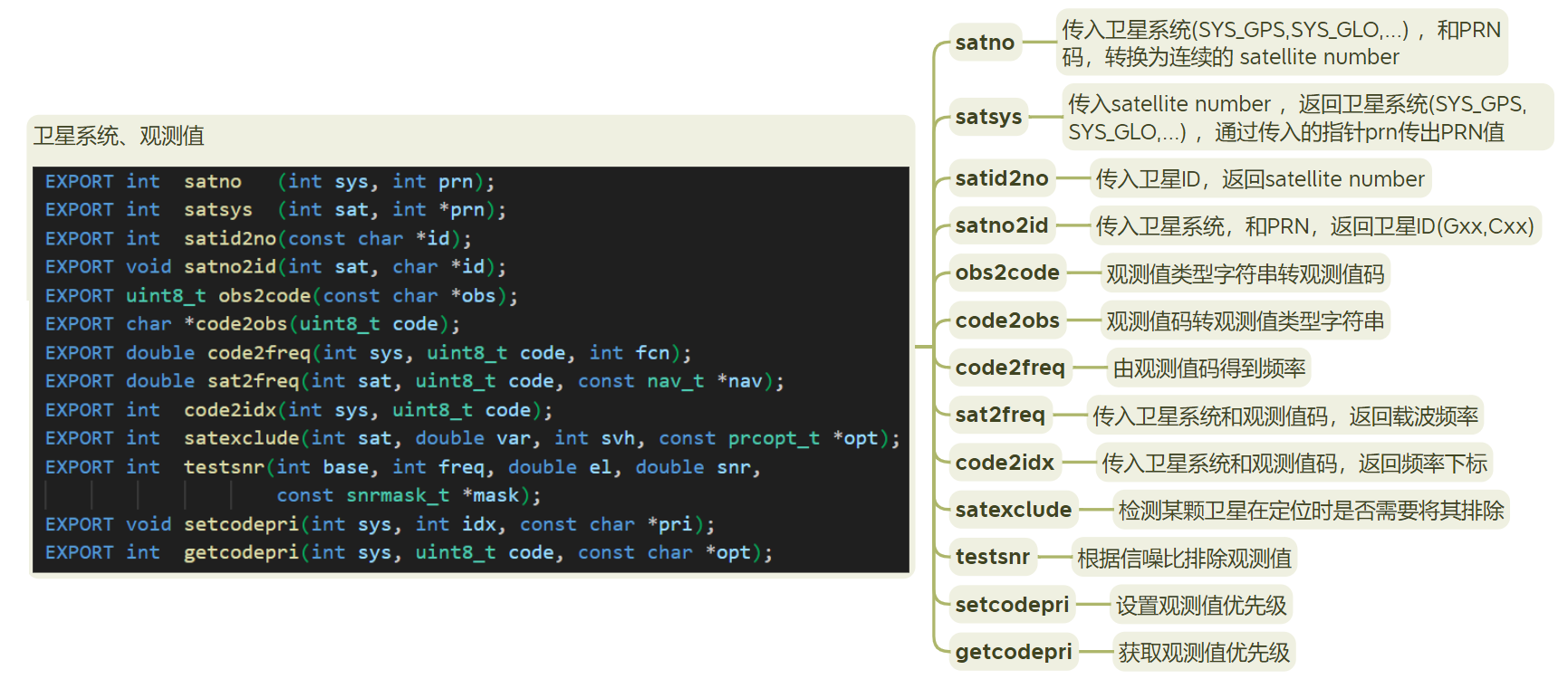
6、卫星系统、观测值
- 卫星系统表示:
- 表示卫星系统的字母:GRECJIS。
- 7 位二进制码表示,对应位写 1 表示有对应的系统,做与运算可加系统。
- 卫星的表示:
- 可以表示为各系统的卫星ID(系统缩写+PRN):B02、C21。
- 也可表示为连续的 satellite number。
- 观测值类型:
- C:伪距、D:多普勒、L:载波相位、S:载噪比。
CODE_XXX:观测值类型定义,用一串连续的数字表示。sigind_t:表示每种卫星系统的载波类型和观测值类型 ,每种类型的系统其实对应的就是一个sigind_t结构体。
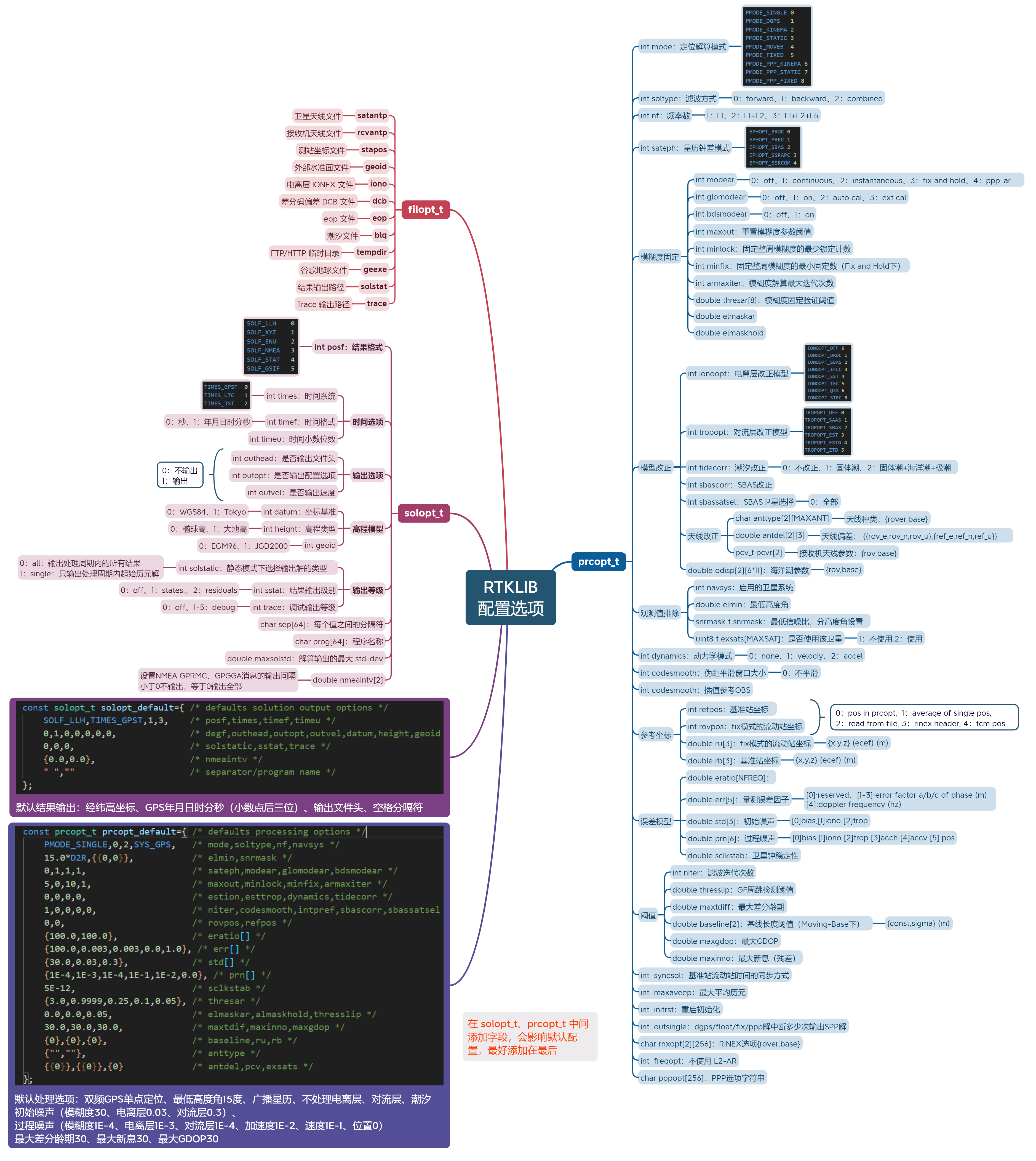
7、配置选项
三、后处理
1、main()
程序从 main.c 的 main() 函数开始执行,整个程序都在 t1=clock() 和 t2=clock() 中执行,求得t2-t1为程序执行时间。main() 函数接收传入的命令行参数即 gamp.cfg 的文件路径,如果传入了参数,调用 proccfgfile() 进行下一步处理。
- VS 中:在 项目属性-调试-命令行参数 中指定命令行参数。
- Windows 的文件路径中一般用
\,且为了避免转义需要写成\\。linux一般用/。
int main(int argc, char **argv)
{//char cfgfile[1000]="C:\\mannual_GAMP\\Examples\\2017244\\gamp.cfg";char *cfgfile;long t1,t2;t1=clock();if (argc==1) {printf("\n * The input command-line parameter indicating configure file is lost, please check it!\n");return 0;}else {cfgfile=argv[1];}// 调用 proccfgfile() 处理配置文件/* find processing configure file */proccfgfile(cfgfile);t2=clock();printf("\n * The total time for running the program: %6.3f seconds\n%c",(double)(t2-t1)/CLOCKS_PER_SEC,'\0');//printf("Press any key to exit!\n");//getchar();return 0;
}
2、proccfgfile():处理配置文件

proccfgfile() 函数先将 PPP_Glo 结构体初始化,将处理方式,输入输出文件路径赋空值。打开传入的 gamp.cfg 文件,获取观测值文件路径和处理方式,根据观测文件的数量调用对应的函数:
- 单个观测文件调用
procOneFile()进行下一步处理; - 如果有多个文件调用
batchProc()进行批量处理,batchProc()会打开文件夹,循环查找文件夹中的观测值O文件,调用procOneFile()进行下一步处理。
观测值
O文件的后缀有两种,一种是直接.O结尾,一种是.ddO结尾,dd表示年份后两位。
static int proccfgfile(char cfgfile[])
{FILE *fp=NULL;char *p,tmp[MAXSTRPATH]={'\0'};// 将 PPP_Glo 结构体初始化,将处理方式、输入输出文件路径赋空值//initializationPPP_Glo.prcType=-1;PPP_Glo.outFolder[0]='\0';PPP_Glo.inputPath[0]='\0';// 打开传入的 gamp.cfg 配置文件if ((fp=fopen(cfgfile,"r"))==NULL) {printf("*** ERROR: open configure file failed, please check it!\n");return 0;}while (!feof(fp)) {tmp[0]='\0';fgets(tmp,MAXSTRPATH,fp);if ((tmp!=NULL)&&(tmp[0]=='#')) continue;// 获取观测值文件路径和处理方式if (strstr(tmp,"obs file/folder")) {p=strrchr(tmp,'=');sscanf(p+1,"%d",&PPP_Glo.prcType);tmp[0]='\0';if (fgets(tmp,MAXSTRPATH,fp)) {p=strrchr(tmp,'=');sscanf(p+1,"%[^,]",PPP_Glo.inputPath);// 调用 trimSpace() 去除空格,调用 cutFilePathSep() 去除文件末尾的 /trimSpace(PPP_Glo.inputPath);cutFilePathSep(PPP_Glo.inputPath);}else {printf("*** ERROR: read obs files path error!");return 0;}break;}}fclose(fp);if (PPP_Glo.prcType<0||PPP_Glo.prcType>2) {printf("*** ERROR: read obs files path error!");return 0;}if (PPP_Glo.prcType==0) // 单个观测文件调用 procOneFile() 进行下一步处理procOneFile(PPP_Glo.inputPath,cfgfile,0,1);else if (PPP_Glo.prcType==1) // 多个文件调用 batchProc() 进行批量处理batchProc(PPP_Glo.inputPath,cfgfile);return 1;
}
3、procOneFile():处理单个观测值文件
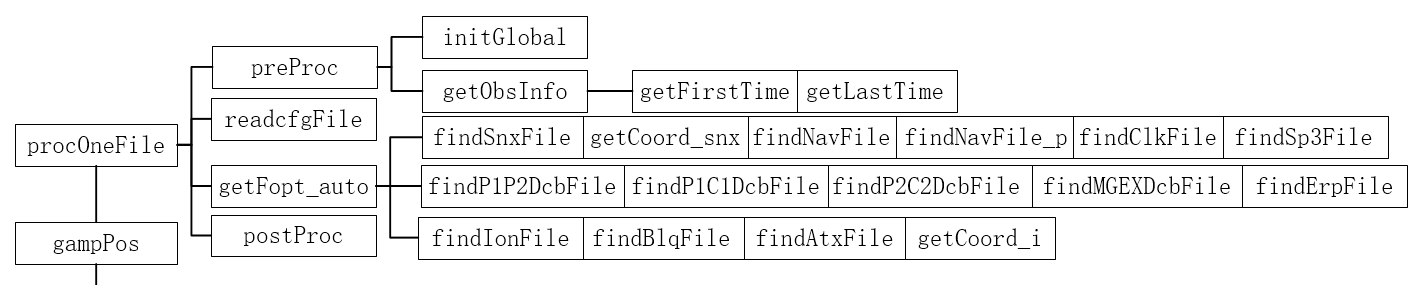
-
先调用
preProc()预处理:通过调用initGlobal()初始化PPP_Glo结构体;调用getObsInfo()读取观测O文件的一部分,获取起止时间、文件版本、天线种类等基础信息;为filopt.inf、filopt.outf开辟内存空间。 -
调用
readcfgFile()读取整个配置文件,通过strstr(line,"start_time")匹配处理选项,存储到prcOpt_Ex、prcopt。 -
调用
getFopt_auto(),通过调用findClkFile()、findNavFile(),根据后缀名自动查找各种 PPP 解算所需的文件,将文件路径存到fopt->inf中。 -
调用
gampPos()进行下一步处理;处理结束,调用postProc()释放filopt.inf、filopt.outf内存空间。
extern void procOneFile(char file[], char cfgfile[], int iT, int iN)
{procparam_t pparam;gtime_t t={0},ts=t,te=t ;long t1,t2;t1=clock();// 先调用 preProc() 预处理:// 其通过调用 initGlobal() 初始化 PPP_Glo 结构体// 调用 getObsInfo() 读取观测O文件的一部分,获取起止时间、文件版本、天线种类等基础信息// 为 filopt.inf、filopt.outf 开辟内存空间preProc(file,&pparam,&ts,&te);printf(" * Processing the %dth", iN);if (iT>0) printf("/%d", iT);printf(" ofile: %s\n", PPP_Glo.ofileName_ful);// 调用 readcfgFile() 读取整个配置文件,通过 strstr(line,"start_time") 匹配处理选项,存储到 prcOpt_Ex、prcopt//read configure filereadcfgFile(cfgfile,&pparam.prcopt,&pparam.solopt,&pparam.filopt);//single-, dual- or triple-frequency?if (pparam.prcopt.ionoopt==IONOOPT_IF12||pparam.prcopt.ionoopt==IONOOPT_UC1) {if (pparam.prcopt.nf!=1) {printf("*** ERROR: Number of frequencies Error! Please set inpfrq=1.\n");return;}}if (pparam.prcopt.ionoopt==IONOOPT_UC12) {if (pparam.prcopt.nf!=2) {printf("*** ERROR: Number of frequencies Error! Please set inpfrq=2.\n");return;}}//processing time setif (!PPP_Glo.prcOpt_Ex.bTsSet) PPP_Glo.prcOpt_Ex.ts=ts;else if (timediff(ts,PPP_Glo.prcOpt_Ex.ts)>0) PPP_Glo.prcOpt_Ex.ts=ts;if (!PPP_Glo.prcOpt_Ex.bTeSet) PPP_Glo.prcOpt_Ex.te=te;else if (timediff(te,PPP_Glo.prcOpt_Ex.te)<0) PPP_Glo.prcOpt_Ex.te=te;// 调用 getFopt_auto() ,通过调用 findClkFile()、findNavFile(),根据后缀名自动查找各种 PPP 解算所需的文件,将文件路径存到 fopt->inf 中//automatically matches the corresponding filesgetFopt_auto(file,PPP_Glo.obsDir,ts,te,pparam.prcopt,pparam.solopt,&pparam.filopt);// 调用 gampPos() 进行下一步处理// post processing positioninggampPos(PPP_Glo.prcOpt_Ex.ts, PPP_Glo.prcOpt_Ex.te, 0.0, 0.0, &pparam.prcopt,&pparam.solopt,&pparam.filopt);// 调用 postProc() 释放 filopt.inf、filopt.outf 内存空间postProc(pparam);t2=clock();sprintf(PPP_Glo.chMsg," * The program runs for %6.3f seconds\n%c",(double)(t2-t1)/CLOCKS_PER_SEC,'\0');outDebug(OUTWIN,OUTFIL,0);printf("/***************************** OK *****************************/\n\n\n");if (PPP_Glo.outFp[OFILE_DEBUG]) {fclose(PPP_Glo.outFp[OFILE_DEBUG]);PPP_Glo.outFp[OFILE_DEBUG]=NULL;}
}
4、gampPos():开始后处理

-
先调用
outhead()写输出文件的文件头。 -
调用
setcodepri()设置观测值优先级。 -
调用
readdcb()、readobsnav()、readpreceph()等函数读取文件。 -
文件读取完之后,调用
execses()进行下一步处理。 -
处理完之后调用
freeobsnav()、freepreceph()释放内存空间。
extern int gampPos(gtime_t ts, gtime_t te, double ti, double tu, prcopt_t *popt, const solopt_t *sopt, filopt_t *fopt)
{int i,j,stat=0,index[MAXINFILE]={0};// 先调用 outhead() 写输出文件的文件头/* write header to output file */if (!outhead(fopt->outf,popt,sopt,PPP_Glo.outFp,MAXOUTFILE)) return 0;for (i=0;i<MAXOUTFILE;i++) {if (fopt->outf[i]&&strlen(fopt->outf[i])>2) PPP_Glo.outFp[i]=openfile(fopt->outf[i]);elsePPP_Glo.outFp[i]=NULL;}// 调用 setcodepri() 设置观测值优先级/* set rinex code priority for precise clock */if (PMODE_PPP_KINEMA<=popt->mode)setcodepri(SYS_GPS,1,popt->sateph==EPHOPT_PREC?"PYWC":"CPYW");// 调用 readdcb()、readobsnav()、readpreceph() 等函数读取文件/* read satellite antenna parameters */if (*fopt->antf&&!(readpcv(fopt->antf,&pcvss))) {printf("*** ERROR: no sat ant pcv in %s\n",fopt->antf);return -1;}/* read dcb parameters */for (i=0;i<MAXSAT;i++) for (j=0;j<3;j++) {navs.cbias[i][j]=0.0;}if (*fopt->p1p2dcbf) readdcb(fopt->p1p2dcbf,&navs);if (*fopt->p1c1dcbf) readdcb(fopt->p1c1dcbf,&navs);if (*fopt->p2c2dcbf) readdcb(fopt->p2c2dcbf,&navs);if (*fopt->mgexdcbf&&(popt->navsys&SYS_CMP||popt->navsys&SYS_GAL))readdcb_mgex(fopt->mgexdcbf,&navs,PPP_Glo.prcOpt_Ex.ts);/* read erp data */if (*fopt->eopf) {if (!readerp(fopt->eopf,&navs.erp)) {printf("ERROR: no erp data %s\n",fopt->eopf);}}/* read ionosphere data file */if (*fopt->ionf&&(popt->ionoopt==IONOOPT_TEC||((popt->ionoopt==IONOOPT_UC1||popt->ionoopt==IONOOPT_UC12)&&PPP_Glo.prcOpt_Ex.ion_const)))readtec(fopt->ionf,&navs,1);for (i=0;i<MAXINFILE;i++) index[i]=i;/* read prec ephemeris */readpreceph(fopt->inf,MAXINFILE,popt,&navs);/* read obs and nav data */if (!readobsnav(ts,te,ti,fopt->inf,index,MAXINFILE,popt,&obss,&navs,stas)) {freeobsnav(&obss,&navs);return 0;}if (PPP_Glo.nEpoch<=1) {strcpy(PPP_Glo.chMsg,"PPP_Glo.nEpoch<=1!\n\0");printf("%s",PPP_Glo.chMsg);freeobsnav(&obss,&navs);return 0;}//read igs antex only once, and save the elements in 'pcvss'/* set antenna paramters */setpcv(obss.data[0].time,popt,&navs,&pcvss,&pcvss,stas);/* read ocean tide loading parameters */if (popt->mode>PMODE_SINGLE&&fopt->blqf) {readotl(popt,fopt->blqf,stas);}// 调用 execses() 进行下一步处理//next processingstat=execses(popt,sopt,fopt);// 处理完之后调用调用 freeobsnav()、freepreceph() 释放内存空间/* free obs and nav data */freeobsnav(&obss,&navs);/* free prec ephemeris and sbas data */freepreceph(&navs);/* free antenna parameters */if (pcvss.pcv) {free(pcvss.pcv); pcvss.pcv=NULL; pcvss.n=pcvss.nmax=0;}if (pcvsr.pcv) {free(pcvsr.pcv); pcvsr.pcv=NULL; pcvsr.n=pcvsr.nmax=0;}/* free erp data */if (navs.erp.data) {free(navs.erp.data); navs.erp.data=NULL; navs.erp.n=navs.erp.nmax=0;}if (PPP_Glo.outFp[OFILE_IPPP]) fprintf(PPP_Glo.outFp[OFILE_IPPP],"-PPP_BLOCK\n");for (i=0;i<MAXOUTFILE;i++) {if (i==OFILE_DEBUG) continue;if (PPP_Glo.outFp[i]) {fclose(PPP_Glo.outFp[i]);PPP_Glo.outFp[i]=NULL;}}return stat;
}
1. setcodepri():设置信号优先级。
如果输入的观测数据在同一频率内包含多个信号,GAMP 将按照以下默认优先级选择一个信号进行处理。
static char codepris[7][MAXFREQ][16]={ /* code priority table *//* L1/E1 L2/B1 L5/E5a/L3 L6/LEX/B3 E5b/B2 E5(a+b) S */{"CPYWMNSL","PYWCMNDSLX","IQX" ,"" ,"" ,"" ,"" }, /* GPS */{"PC" ,"PC" ,"IQX" ,"" ,"" ,"" ,"" }, /* GLO */{"CABXZ" ,"" ,"IQX" ,"ABCXZ" ,"IQX" ,"IQX" ,"" }, /* GAL */{"CSLXZ" ,"SLX" ,"IQX" ,"SLX" ,"" ,"" ,"" }, /* QZS */{"C" ,"" ,"IQX" ,"" ,"" ,"" ,"" }, /* SBS */{"IQX" ,"IQX" ,"IQX" ,"IQX" ,"IQX" ,"" ,"" }, /* BDS */{"" ,"" ,"ABCX" ,"" ,"" ,"" ,"ABCX"} /* IRN */
};
用 setcodepri(),可改变优先级顺序:
extern void setcodepri(int sys, int freq, const char *pri)
{ if (freq<=0||MAXFREQ<freq) return;if (sys&SYS_GPS) strcpy(codepris[0][freq-1],pri);if (sys&SYS_GLO) strcpy(codepris[1][freq-1],pri);if (sys&SYS_GAL) strcpy(codepris[2][freq-1],pri);if (sys&SYS_QZS) strcpy(codepris[3][freq-1],pri);if (sys&SYS_SBS) strcpy(codepris[4][freq-1],pri);if (sys&SYS_CMP) strcpy(codepris[5][freq-1],pri);if (sys&SYS_IRN) strcpy(codepris[6][freq-1],pri);
}
2. outhead():输出结果文件头
5、excses():执行后处理解算

- 先调用
sampledetermine()获取观测值采用间隔(解算频率)。 - 调用
calCsThres()获取根据采样频率周跳检测的阈值,调用rtkinit()初始化rtk结构体。 - 调用
procpos()进行下一步处理。 - 处理完之后调用
rtkfree()释放rtk结构体。
static int execses(prcopt_t *popt, const solopt_t *sopt, filopt_t *fopt)
{rtk_t rtk;// 先调用 sampledetermine() 获取观测值采用间隔(解算频率),周跳检测会用到//to determine the thresh values for cycle slip detectionPPP_Glo.sample=sampledetermine(popt);// 调用 calCsThres() 获取周跳检测的阈值if (fabs(PPP_Glo.prcOpt_Ex.csThresGF)<0.01||fabs(PPP_Glo.prcOpt_Ex.csThresMW)<0.01)calCsThres(popt,PPP_Glo.sample);// 调用 rtkinit() 初始化 rtk 结构体rtkinit(&rtk,popt);if (PPP_Glo.outFp[OFILE_IPPP]) outiPppHead(PPP_Glo.outFp[OFILE_IPPP],rtk);// 根据前向滤波、后向滤波、前后向结合,以不同的方式调用 procpos() 进行下一步处理if (popt->soltype==0) { /* forward */PPP_Glo.revs=0;PPP_Glo.iObsu=0;PPP_Glo.iEpoch=0;procpos(&rtk,popt,sopt,0); }else if (popt->soltype==1) { /* backward */PPP_Glo.revs=1; PPP_Glo.iObsu=obss.n-1;PPP_Glo.iEpoch=PPP_Glo.nEpoch;procpos(&rtk,popt,sopt,0);}else { /* combined */PPP_Glo.solf=(sol_t *)malloc(sizeof(sol_t)*PPP_Glo.nEpoch);PPP_Glo.solb=(sol_t *)malloc(sizeof(sol_t)*PPP_Glo.nEpoch);if (PPP_Glo.solf&&PPP_Glo.solb) {}elseprintf("error : memory allocation");free(PPP_Glo.solf); PPP_Glo.solf=NULL;free(PPP_Glo.solb); PPP_Glo.solb=NULL;}// 处理完之后调用 rtkfree() 释放 rtk 结构体rtkfree(&rtk);return 0;
}
1. sampledetermine():确定采样间隔
2. calCsThres():计算 MF、GF 周跳检测阈值
目前用于非差周跳探测最常用的方法是联合使用 Geometry-free (GF) 和 MW 组合观测值进行周跳探测,其充分利用了双频观测值线性组合的特点。GF 和 MW 组合观测值分别为:
L G F ( i ) = λ 1 Φ 1 ( i ) − λ 2 Φ 2 ( i ) = ( γ 2 − 1 ) I 1 ( i ) + ( λ 1 N 1 − λ 2 N 2 ) { λ δ Φ δ ( i ) = ( f 1 λ 1 Φ 1 ( i ) − f 2 λ 2 Φ 2 ( i ) ) / ( f 1 − f 2 ) = ρ ( i ) + f 1 f 2 / ( f 1 2 − f 2 2 ) ⋅ I 1 ( i ) + λ δ N δ P δ ( i ) = ( f 1 P 1 ( i ) + f 2 P 2 ( i ) ) / ( f 1 + f 2 ) = ρ ( i ) + f 1 f 2 / ( f 1 2 − f 2 2 ) ⋅ I 1 ( i ) N δ = N 1 − N 2 = Φ δ ( i ) − P δ ( i ) / λ δ λ δ = c / ( f 1 − f 2 ) \begin{array}{c} L_{\mathrm{GF}}(i)=\lambda_{1} \Phi_{1}(i)-\lambda_{2} \Phi_{2}(i)=\left(\gamma_{2}-1\right) I_{1}(i)+\left(\lambda_{1} N_{1}-\lambda_{2} N_{2}\right) \\ \left\{\begin{array}{l} \lambda_{\delta} \Phi_{\delta}(i)=\left(f_{1} \lambda_{1} \Phi_{1}(i)-f_{2} \lambda_{2} \Phi_{2}(i)\right) /\left(f_{1}-f_{2}\right)=\rho(i)+f_{1} f_{2} /\left(f_{1}^{2}-f_{2}^{2}\right) \cdot I_{1}(i)+\lambda_{\delta} N_{\delta} \\ P_{\delta}(i)=\left(f_{1} P_{1}(i)+f_{2} P_{2}(i)\right) /\left(f_{1}+f_{2}\right)=\rho(i)+f_{1} f_{2} /\left(f_{1}^{2}-f_{2}^{2}\right) \cdot I_{1}(i) \\ N_{\delta}=N_{1}-N_{2}=\Phi_{\delta}(i)-P_{\delta}(i) / \lambda_{\delta} \\ \lambda_{\delta}=c /\left(f_{1}-f_{2}\right) \end{array}\right. \end{array} LGF(i)=λ1Φ1(i)−λ2Φ2(i)=(γ2−1)I1(i)+(λ1N1−λ2N2)⎩ ⎨ ⎧λδΦδ(i)=(f1λ1Φ1(i)−f2λ2Φ2(i))/(f1−f2)=ρ(i)+f1f2/(f12−f22)⋅I1(i)+λδNδPδ(i)=(f1P1(i)+f2P2(i))/(f1+f2)=ρ(i)+f1f2/(f12−f22)⋅I1(i)Nδ=N1−N2=Φδ(i)−Pδ(i)/λδλδ=c/(f1−f2)
式中, i i i 表示观测历元号; λ δ \lambda_{\delta} λδ 和 N δ N_{\delta} Nδ 分别为宽巷波长和宽巷模糊度。 可以看出,MW 组合的精度受伪距观测噪声和多路径效应的影响,可通过下述递推公式减弱其影响,第 i i i 个历元的 MW 组合观测量的平均值及方差为:
⟨ N δ ⟩ i = ⟨ N δ ⟩ i − 1 + 1 i ( N δ i − ⟨ N δ ⟩ i − 1 ) σ i 2 = σ i − 1 2 + 1 i { ( N δ i − ⟨ N δ ⟩ i − 1 ) 2 − σ i − 1 2 } \begin{array}{c} \left\langle N_{\delta}\right\rangle_{i}=\left\langle N_{\delta}\right\rangle_{i-1}+\frac{1}{i}\left(N_{\delta i}-\left\langle N_{\delta}\right\rangle_{i-1}\right) \\ \sigma_{i}^{2}=\sigma_{i-1}^{2}+\frac{1}{i}\left\{\left(N_{\delta i}-\left\langle N_{\delta}\right\rangle_{i-1}\right)^{2}-\sigma_{i-1}^{2}\right\} \end{array} ⟨Nδ⟩i=⟨Nδ⟩i−1+i1(Nδi−⟨Nδ⟩i−1)σi2=σi−12+i1{(Nδi−⟨Nδ⟩i−1)2−σi−12}
式中, 〈〉表示多个历元的平滑值。对于 GF 组合,利用当前历元组合观测值与前一历元组合观测值的差值的绝对值 ∣ L G F ( i ) − L G F ( i − 1 ) ∣ \left|L_{\mathrm{GF}}(i)-L_{\mathrm{GF}}(i-1)\right| ∣LGF(i)−LGF(i−1)∣ 作为检验量进行周跳探测。对于 MW 组合,将当前历元 i i i 的 MW 观测量 N δ i N_{\delta i} Nδi 与前 i − 1 i-1 i−1 历元宽巷模糊度平滑值 ⟨ N δ ⟩ i − 1 \left\langle N_{\delta}\right\rangle_{i-1} ⟨Nδ⟩i−1 差值的绝对值进行比较判断是否发生周跳。顾及观测数据的采样率和高度角,给出确定周跳探测经验阈值:
R G F ( E , R ) = { ( − 1.0 / 15.0 ⋅ E + 2 ) ⋅ b G F , E ≤ 1 5 ∘ b G F , E > 1 5 ∘ b G F ( R ) = { 0.05 m , 0 < R ≤ 1 s 0.1 / 20.0 ⋅ R + 0.05 m , 1 < R ≤ 20 s 0.15 m , 20 < R ≤ 60 s 0.25 m , 60 < R ≤ 100 s 0.35 m , 其它 R M W ( E , R ) = { ( − 0.1 ⋅ E + 3 ) ⋅ b M W , E ≤ 2 0 ∘ b M W , E > 2 0 ∘ b MW ( R ) = { 2.5 c , 0 < R ≤ 1 s 2.5 / 20.0 ⋅ R + 2.5 c , 1 < R ≤ 20 s 5.0 c , 20 < R ≤ 60 s 7.5 c , 其它 \begin{array}{l}\begin{array}{l}R_{\mathrm{GF}}(E, R)=\left\{\begin{array}{cc}(-1.0 / 15.0 \cdot E+2) \cdot b_{\mathrm{GF}}, & E \leq 15^{\circ} \\ b_{\mathrm{GF}}, & E>15^{\circ}\end{array}\right. \\ b_{\mathrm{GF}}(R)=\left\{\begin{array}{cc}0.05 \mathrm{~m}, & 0<R \leq 1 \mathrm{~s} \\ 0.1 / 20.0 \cdot R+0.05 \mathrm{~m}, & 1<R \leq 20 \mathrm{~s} \\ 0.15 \mathrm{~m}, & 20<R \leq 60 \mathrm{~s} \\ 0.25 \mathrm{~m}, & 60<R \leq 100 \mathrm{~s} \\ 0.35 \mathrm{~m}, & \text { 其它 }\end{array}\right.\end{array} \\ R_{\mathrm{MW}}(E, R)=\left\{\begin{array}{cc}(-0.1 \cdot E+3) \cdot b_{\mathrm{MW}}, & E \leq 20^{\circ} \\ b_{\mathrm{MW}}, & E>20^{\circ}\end{array}\right. \\ b_{\text {MW }}(R)=\left\{\begin{array}{cc}2.5 \mathrm{c}, & 0<R \leq 1 \mathrm{~s} \\ 2.5 / 20.0 \cdot R+2.5 \mathrm{c}, & 1<R \leq 20 \mathrm{~s} \\ 5.0 \mathrm{c}, & 20<R \leq 60 \mathrm{~s} \\ 7.5 \mathrm{c}, & \text { 其它 }\end{array}\right. \\\end{array} RGF(E,R)={(−1.0/15.0⋅E+2)⋅bGF,bGF,E≤15∘E>15∘bGF(R)=⎩ ⎨ ⎧0.05 m,0.1/20.0⋅R+0.05 m,0.15 m,0.25 m,0.35 m,0<R≤1 s1<R≤20 s20<R≤60 s60<R≤100 s 其它 RMW(E,R)={(−0.1⋅E+3)⋅bMW,bMW,E≤20∘E>20∘bMW (R)=⎩ ⎨ ⎧2.5c,2.5/20.0⋅R+2.5c,5.0c,7.5c,0<R≤1 s1<R≤20 s20<R≤60 s 其它
式中, R G F R_{\mathrm{GF}} RGF (单位: m \mathrm{m} m 或米) 和 R M W R_{\mathrm{MW}} RMW (单位: c \mathrm{c} c 或周) 分别为 G F \mathrm{GF} GF 组合和 M W \mathrm{MW} MW 组合周跳检验量的阈值; E 、 R E 、 R E、R 分别为卫星高度角 (单位:度) 和观测值采样间隔 (单位: s s s )。
extern int calCsThres(prcopt_t *opt, const double sample)
{int b=0;if (sample>0.0) {if (PPP_Glo.prcOpt_Ex.bUsed_gfCs==1&&fabs(PPP_Glo.prcOpt_Ex.csThresGF)<0.01) {if (sample<=1.0) PPP_Glo.prcOpt_Ex.csThresGF=0.05;else if (sample<=20.0) PPP_Glo.prcOpt_Ex.csThresGF=(0.10)/(20.0-0.0)*sample+0.05;else if (sample<=60.0) PPP_Glo.prcOpt_Ex.csThresGF=0.15;else if (sample<=100.0) PPP_Glo.prcOpt_Ex.csThresGF=0.25;else PPP_Glo.prcOpt_Ex.csThresGF=0.35;b=1;}if (PPP_Glo.prcOpt_Ex.bUsed_mwCs==1&&fabs(PPP_Glo.prcOpt_Ex.csThresMW)<0.01) {if (sample<=1.0) PPP_Glo.prcOpt_Ex.csThresMW=2.5;else if (sample<=20.0) PPP_Glo.prcOpt_Ex.csThresMW=(2.5)/(20.0-0.0)*sample+2.5;else if (sample<=60.0) PPP_Glo.prcOpt_Ex.csThresMW=5.0;else PPP_Glo.prcOpt_Ex.csThresMW=7.5;b=1;}return b;}else {//sample<=0.0PPP_Glo.prcOpt_Ex.csThresGF=0.15;PPP_Glo.prcOpt_Ex.csThresMW=5.0;b=0;}return b;
}
6、procpos():进行定位解算

- 循环调用
inputobs()传入一个历元的观测值。 - 调用
obsScan_SPP()筛选出能进行 SPP 解算的观测值。 - 调用
BDmultipathCorr()修正北斗伪距延迟。 - 调用
rtkpos()进行下一步处理。 - 处理完之后调用
outResult()、outsol()输出结果。
static void procpos(rtk_t *rtk,const prcopt_t *popt,const solopt_t *sopt,int mode)
{sol_t sol={{0}};gtime_t time={0};obsd_t obs[MAXOBS];int i,j,k=0,nep=0,nobs,n,solstatic,pri[]={0,1,2,3,4,5,1,6};solstatic=sopt->solstatic&&popt->mode==PMODE_PPP_STATIC;// 循环调用 inputobs() 传入一个历元的观测值/* processing epoch-wise */while ((nobs=inputobs(obs,obss,PPP_Glo.revs,&PPP_Glo.iObsu,&PPP_Glo.iEpoch))>=0) {PPP_Glo.tNow=obs[0].time;time2epoch(PPP_Glo.tNow,PPP_Glo.ctNow);sprintf(PPP_Glo.chTime,"%02.0f:%02.0f:%04.1f%c",PPP_Glo.ctNow[3],PPP_Glo.ctNow[4],PPP_Glo.ctNow[5],'\0');PPP_Glo.sowNow=time2gpst(PPP_Glo.tNow,NULL);k++;if (k==1) {for (j=0;j<MAXSAT;j++) {PPP_Glo.ssat_Ex[j].tLast=PPP_Glo.tNow;}}nep=(int)(30*(60/PPP_Glo.sample));if ((k-1)%nep==0) PPP_Glo.t_30min=PPP_Glo.tNow;// 调用 obsScan_SPP() 观测值检测//pseudorange observation checkingobsScan_SPP(popt,obs,nobs,&n);if (n<=3) {sprintf(PPP_Glo.chMsg,"*** WARNING: There are only %d satellites observed, skip SPP!\n",n);outDebug(OUTWIN,OUTFIL,0);continue;}// 调用 BDmultipathCorr() 分段函数修正北斗伪距多路径延迟if (PPP_Glo.prcOpt_Ex.navSys&SYS_CMP) {BDmultipathCorr(rtk,obs,n);}// 调用 rtkpos() 进行逐历元解算i=rtkpos(rtk,obs,n,&navs);if (i==-1) rtk->sol.stat=SOLQ_NONE;else if (i==0) continue;// 解算完之后调用 outResult()、outsol() 输出结果if (mode==0) { /* forward/backward */outResult(rtk,sopt);if (!solstatic&&PPP_Glo.outFp[0]) outsol(PPP_Glo.outFp[0],&rtk->sol,sopt,PPP_Glo.iEpoch);else if (time.time==0||pri[rtk->sol.stat]<=pri[sol.stat]) {sol=rtk->sol;if (time.time==0||timediff(rtk->sol.time,time)<0.0) time=rtk->sol.time;}}}
}
1. BDmultipathCorr():北斗伪距偏差改正
研究发现,BDS2 卫星存在一种可能由多路径引起的卫星端的伪距观测值系统偏差,称为北斗卫星伪距偏差,也称北斗伪距多路径延迟。该伪距偏差只存在于伪距观测值,和卫星高度角密切相关,可基于观测值的 MP 组合得到:
M P m = P m − f m 2 + f n 2 f m 2 − f n 2 ⋅ L m ⋅ λ m + 2 f n 2 f m 2 − f n 2 ⋅ L n ⋅ λ n = M P m − f m 2 + f n 2 f m 2 − f n 2 ⋅ M L m + 2 f n 2 f m 2 − f n 2 ⋅ M L n + B m + ε \begin{aligned} M P_{m} & =P_{m}-\frac{f_{m}^{2}+f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot L_{m} \cdot \lambda_{m}+\frac{2 f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot L_{n} \cdot \lambda_{n} \\ & =M P_{m}-\frac{f_{m}^{2}+f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot M_{L_{m}}+\frac{2 f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot M_{L_{n}}+B_{m}+\varepsilon\end{aligned} MPm=Pm−fm2−fn2fm2+fn2⋅Lm⋅λm+fm2−fn22fn2⋅Ln⋅λn=MPm−fm2−fn2fm2+fn2⋅MLm+fm2−fn22fn2⋅MLn+Bm+ε
式中, m , n ( m ≠ n ) m, n(m \neq n) m,n(m=n) 表示频率编号; M P m , M L m , M L n M P_{m}, M_{L_{m}}, M_{L_{n}} MPm,MLm,MLn 分别表示频率 m m m 的伪距多路径和频率 m , n m, n m,n 的载波相位多路径; B m B_{m} Bm 包括载波相位模糊度和硬件延迟等, 在连续观测无周跳情况下为常数。MP 组合是无电离层无几何组合观测值,对其平滑后可分离出伪距多路径噪声。Wanninger 基于卫星高度角,采用分段线性拟合的方法建立了节点间隔 10 度的北斗二号 IGSO 和 MEO 卫星伪距偏差的经验模型,如下表所示,本文使用该模型,通过插值对 BDS2 伪距偏差进行改正:
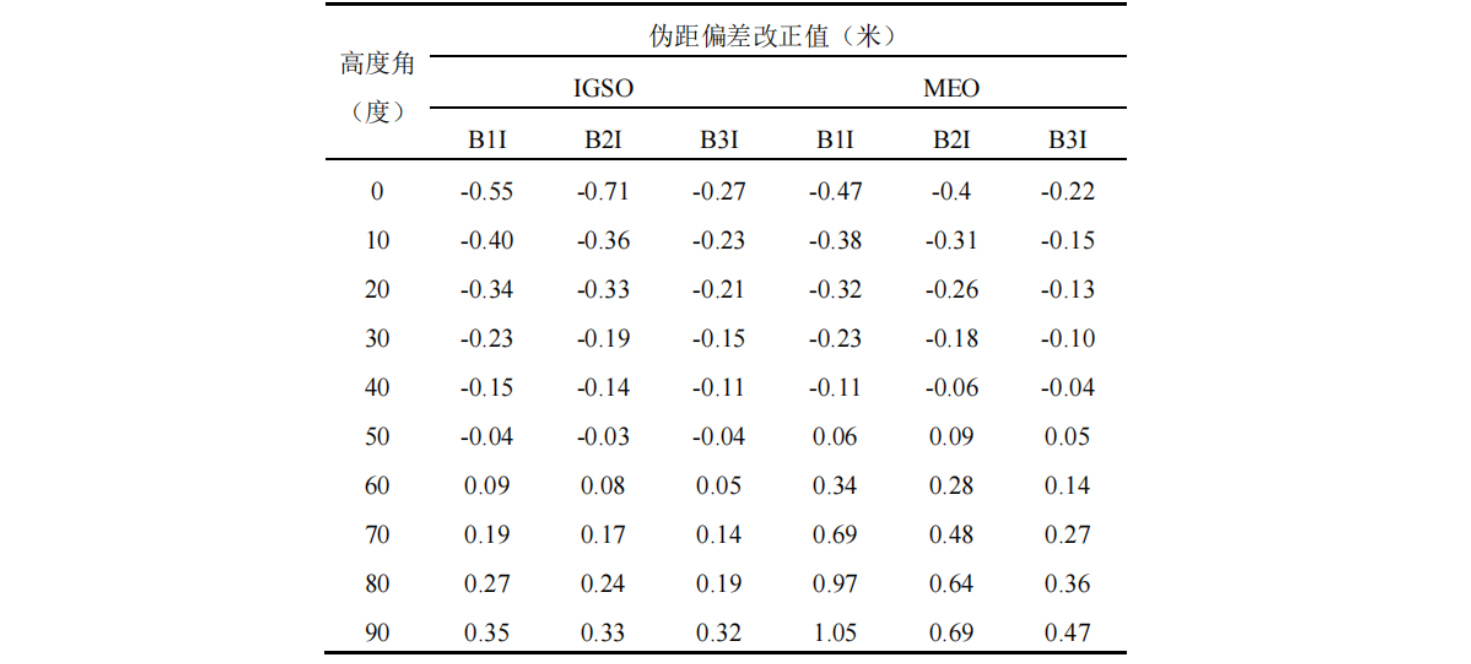
代码中,先定义了基于卫星高度角,分段线性拟合模型 IGSOCOEF、MEOCOEF;然后遍历观测值,筛选出需要改正的北斗卫星,计算角度制的高度角 elev,取高度角的十位数 b,作为从 IGSOCOEF、MEOCOEF 中取值的下标;插值计算改正量 dmp 加到伪距上。
extern void BDmultipathCorr(rtk_t *rtk, obsd_t *obs, int n)
{int i,j,sat,prn,b;double dmp[3],elev,a;// 基于卫星高度角,分段线性拟合模型const static double IGSOCOEF[3][10]={ /* m */{-0.55,-0.40,-0.34,-0.23,-0.15,-0.04,0.09,0.19,0.27,0.35}, //B1{-0.71,-0.36,-0.33,-0.19,-0.14,-0.03,0.08,0.17,0.24,0.33}, //B2{-0.27,-0.23,-0.21,-0.15,-0.11,-0.04,0.05,0.14,0.19,0.32}, //B3};const static double MEOCOEF[3][10]={ /* m */{-0.47,-0.38,-0.32,-0.23,-0.11,0.06,0.34,0.69,0.97,1.05}, //B1{-0.40,-0.31,-0.26,-0.18,-0.06,0.09,0.28,0.48,0.64,0.69}, //B2{-0.22,-0.15,-0.13,-0.10,-0.04,0.05,0.14,0.27,0.36,0.47}, //B3};// 遍历观测值for (i=0;i<n&&i<MAXOBS;i++) {sat=obs[i].sat;// 筛选出北斗卫星if (PPP_Glo.sFlag[sat-1].sys!=SYS_CMP) continue;// 剔除北斗一号卫星prn=PPP_Glo.sFlag[sat-1].prn;if (prn<=5) continue;// 计算角度制的高度角 elevelev=rtk->ssat[sat-1].azel[1]*R2D;if (elev<=0.0) continue;for (j=0;j<3;j++) dmp[j]=0.0;// 取高度角的十位数 b,作为从 IGSOCOEF、MEOCOEF 中取值的下标a=elev*0.1;b=(int)a;// 插值计算改正量 dmpif (prn>=6&&prn<11) { // IGSO(C06, C07, C08, C09, C10)if (b<0) {for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][0];}else if (b>=9) {for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][9];}else {for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][b]*(1.0-a+b)+IGSOCOEF[j][b+1]*(a-b);}}else if (prn>=11) { // MEO(C11, C12, C13, C14)if (b<0) {for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][0];}else if (b>=9) {for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][9];}else {for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][b]*(1.0-a+b)+MEOCOEF[j][b+1]*(a-b);}}// 伪距加上改正量 dmpfor (j=0;j<3;j++) obs[i].P[j]+=dmp[j];}
}
2. obsScan_SPP():筛选出能进行 SPP 解算的观测值
遍历传入观测值列表 obs,根据启用的卫星系统 popt->navsys,排除的卫星 popt->exsats 筛选观测值,然后判断有没有伪距观测值,原路返回的 obs 就是筛选过后的观测值列表。
extern void obsScan_SPP(const prcopt_t *popt, obsd_t *obs, const int nobs, int *nValid)
{double dt;int i,j,n,sat,sys;// 遍历观测值列表for (i=n=0;i<nobs;i++) {sat=obs[i].sat;sys=PPP_Glo.sFlag[sat-1].sys;// 根据启用的卫星系统 popt->navsys,排除的卫星 popt->exsats 筛选观测值/* exclude satellites */if (!(sys&popt->navsys)) continue;if (popt->exsats[sat-1]) continue;// 判断有没有伪距观测值dt=0.0;for (j=0;j<NFREQ;j++) {dt+=obs[i].P[j]*obs[i].P[j];}if (dt==0.0) continue;// 返回的 obs 就是筛选过后的观测值列表obs[n++]=obs[i];}// 有效观测值数if (nValid) *nValid=n;
}
7、rtkpos():逐历元解算
- 至此已经读完了文件,开始进行逐历元解算,先调用
spp()进行 SPP 解算。 - 调用
obsScan_PPP()筛选出能进行 PPP 解算的观测值。 - 调用
clkRepair()修复钟跳。 - 调用
pppos()进行 PPP 解算。 - 调用
calDop()计算各种 DOP 值。 - 调用
keepEpInfo()存储当前历元的信息,其中会调用gfmeas()、wlAmbMeas()。
static int rtkpos(rtk_t *rtk, obsd_t *obs, int n, const nav_t *nav)
{gtime_t time;int nu;char msg[128]="";prcopt_t *opt=&rtk->opt;rtk->sol.stat=SOLQ_NONE;time=rtk->sol.time; /* previous epoch */PPP_Glo.bOKSPP=1;// 先调用 spp() 进行 SPP 解算流动站坐标,作为 PPP 初值/* rover position by single point positioning */if (!spp(obs,n,nav,opt,&rtk->sol,NULL,rtk->ssat,msg)) {sprintf(PPP_Glo.chMsg,"*** ERROR: point pos error (%s)\n",msg);outDebug(OUTWIN,OUTFIL,0);PPP_Glo.bOKSPP=0;PPP_Glo.nBadEpSPP++;//fewer than 4 satellites available, skip to next epochif (n<=4) {return -1;}}// 计算和上一历元间时间间隔if (time.time!=0) rtk->tt=timediff(rtk->sol.time,time);// 调用 obsScan_PPP() 观测值检测nu=n;obsScan_PPP(opt,obs,n,&nu);if (nu<=4) {sprintf(PPP_Glo.chMsg, "*** WARNING: There are only %d satellites observed, skip PPP!\n",nu);outDebug(OUTWIN,OUTFIL,0);return 0;}// 调用 clkRepair() 修复钟跳//clock jump repairclkRepair(obs,nu);// 调用 pppos() 进行 PPP 解算/* precise point positioning */if (opt->mode>=PMODE_PPP_KINEMA) {pppos(rtk,obs,nu,nav);}else return 1;// 调用 calDop() 计算各种 DOP 值//calculate DOPscalDop(rtk,obs,nu);// 调用 keepEpInfo() 存储当前历元的信息,其中会调用 gfmeas()、wlAmbMeas()//save the information for current epochkeepEpInfo(rtk,obs,nu,nav);return 1;
}
1. clkRepair():钟跳修复
一旦接收机发生钟跳,将破坏 GNSS 时标、伪距和载波相位观测值之间的一致性。根据钟跳对这三个基本量的影响方式,可将接收机钟跳分为四类,其定义与分类标准见下表:
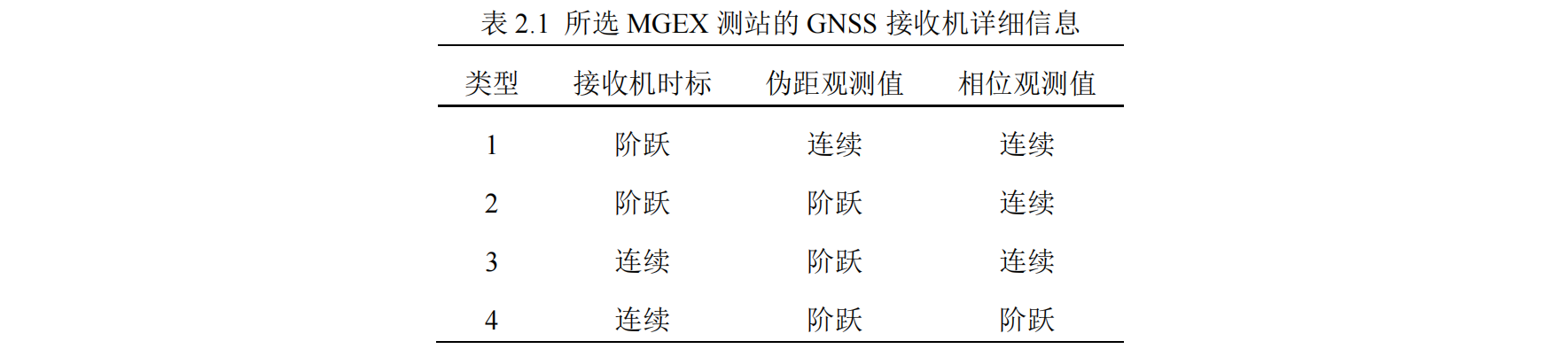
其中,第二类和第三类钟跳会影响 MW 组合探测周跳的准确性,使其对周跳的探测失效。因此,本文关于接收机钟跳探测与修复的对象均是针对第二类和第三类钟跳,采用观测值的历元间差分法进行实时钟跳探测与修复。令:
{ Δ P s ( i ) = P s ( i ) − P s ( i − 1 ) Δ L s ( i ) = L s ( i ) − L s ( i − 1 ) \left\{\begin{array}{l}\Delta P^{s}(i)=P^{s}(i)-P^{s}(i-1) \\ \Delta L^{s}(i)=L^{s}(i)-L^{s}(i-1)\end{array}\right. {ΔPs(i)=Ps(i)−Ps(i−1)ΔLs(i)=Ls(i)−Ls(i−1)
式中, P 和 L 分别为原始的伪距和载波相位观测值。构造检验量 T 及其条件式:
{ T s ( i ) = Δ P s ( i ) − Δ L s ( i ) ∣ T s ( i ) ∣ > k 1 ≈ 0.001 ⋅ c \left\{\begin{array}{l}T^{s}(i)=\Delta P^{s}(i)-\Delta L^{s}(i) \\ \left|T^{s}(i)\right|>k_{1} \approx 0.001 \cdot c\end{array}\right. {Ts(i)=ΔPs(i)−ΔLs(i)∣Ts(i)∣>k1≈0.001⋅c
式中, k 1 k_{1} k1 为阈值。对于某一历元,当且仅当所有卫星满足上式中条件式时,才可以认为该历元时刻可能存在钟跳或所有卫星发生大周跳,此时利用下式计算钟跳候选值 ς \varsigma ς 进而确定实际钟跳值 J ( m s ) J(\mathrm{~ms}) J( ms) :
ς = α ⋅ ( ∑ s = 1 m T s ) / ( m ⋅ c ) J = { int ( ς ) , ∣ ς − int ( ς ) ∣ ≤ k 2 0 , 其它 \begin{array}{c} \varsigma=\alpha \cdot\left(\sum_{s=1}^{m} T^{s}\right) /(m \cdot c) \\ J=\left\{\begin{array}{cc} \operatorname{int}(\varsigma), & |\varsigma-\operatorname{int}(\varsigma)| \leq k_{2} \\ 0, & \text { 其它 } \end{array}\right. \end{array} ς=α⋅(∑s=1mTs)/(m⋅c)J={int(ς),0,∣ς−int(ς)∣≤k2 其它
式中, α \alpha α 为系数因子,取 α = 1 0 3 ; k 2 \alpha=10^{3} ; k_{2} α=103;k2 为阈值,取 k 2 = 1 0 − 5 ∼ 1 0 − 7 k_{2}=10^{-5} \sim 10^{-7} k2=10−5∼10−7 。
钟跳修复时,采用反向修复法,即当发生第二类或第三类钟跳时,将连续的载波相位观测值调整成阶跃形式,同伪距基准保持一致。其修复公式为:
L ~ s ( i ) = L s ( i ) + J ⋅ c / α \tilde{L}^{s}(i)=L^{s}(i)+J \cdot c / \alpha L~s(i)=Ls(i)+J⋅c/α
式中, L ~ s ( i ) \tilde{L}^{s}(i) L~s(i) 为修复后的载波相位观测值。
代码中,
2. obsScan_PPP():筛选出能进行 PPP 解算的观测值
遍历传入的观测值列表,剔除没有双频载波相位的观测值和双频伪距相差过大的观测值,原路返回的 obs 筛选过后的观测值列表。
// 筛选出能进行 PPP 解算的观测值
extern void obsScan_PPP(const prcopt_t *popt, obsd_t *obs, const int nobs, int *nValid)
{int i,n,sat,f2;// 遍历传入的观测值列表,剔除没有双频载波相位的观测值和双频伪距相差过大的观测值for (i=n=0;i<nobs&&i<MAXOBS;i++) {sat=obs[i].sat;f2=1;//if (NFREQ>=3&&(PPP_Glo.sFlag[sat-1].sys&(SYS_GAL|SYS_SBS))) f2=2;if (popt->mode>=PMODE_PPP_KINEMA) {// 剔除没有双频载波相位的观测值if (obs[i].L[0]*obs[i].L[f2]==0.0) continue;}// 剔除双频伪距相差过大的观测值if (fabs(obs[i].P[0]-obs[i].P[f2])>=200.0) continue;// 返回的 obs 筛选过后的观测值列表obs[n]=obs[i];n++;}if (nValid) *nValid=n;
}
3. calDop():调用 dops() 计算各种 DOP 值
遍历传入的观测值列表 obs,记录各系统的有效卫星数 rtk->sol.ns、高度角方位角 rtk->ssat[sat-1].azel,调用 dops() 计算各种 DOP 值,存下并返回 PDOP。
static double calDop(rtk_t *rtk, const obsd_t *obs, const int n)
{double azel[MAXSAT*2],dop[4];int i,num,sat;for (i=0;i<NSYS_USED;i++) rtk->sol.ns[i]=0;// 遍历传入的观测值列表 obs,记录各系统的有效卫星数 rtk->sol.ns、高度角方位角 rtk->ssat[sat-1].azelfor (i=num=0;i<n;i++) {sat=obs[i].sat;if (rtk->ssat[sat-1].vsat[0]==0) continue;if (PPP_Glo.sFlag[sat-1].sys==SYS_GPS) rtk->sol.ns[0]++;else if (PPP_Glo.sFlag[sat-1].sys==SYS_GLO) rtk->sol.ns[1]++;else if (PPP_Glo.sFlag[sat-1].sys==SYS_CMP) rtk->sol.ns[2]++;else if (PPP_Glo.sFlag[sat-1].sys==SYS_GAL) rtk->sol.ns[3]++;else if (PPP_Glo.sFlag[sat-1].sys==SYS_QZS) rtk->sol.ns[4]++;azel[2*num+0]=rtk->ssat[sat-1].azel[0];azel[2*num+1]=rtk->ssat[sat-1].azel[1];num++;}// 调用 dops 计算各种 DOP 值dops(num,azel,0.0,dop);rtk->sol.dop[1]=dop[1]; // 存下 PDOPreturn dop[1]; // 返回 PDOP
}
4. dops():计算各种 DOP 值
根据卫星高度角、方位角构建 H 矩阵, H ∗ H T H * H^T H∗HT 得到 Q 矩阵,之后计算:
-
几何精度因子: G D O P = q 11 + q 22 + q 33 + q 44 G D O P=\sqrt{q_{11}+q_{22}+q_{33}+q_{44}} GDOP=q11+q22+q33+q44
-
空间位置精度因子: P D O P = q 11 + q 22 + q 33 P D O P=\sqrt{q_{11}+q_{22}+q_{33}} PDOP=q11+q22+q33
-
平面位置精度因子: H D O P = q 11 ′ + q 22 ′ H D O P=\sqrt{q_{11}^{\prime}+q_{22}^{\prime}} HDOP=q11′+q22′
-
高程精度因子:$ V D O P=\sqrt{q_{33}^{\prime}}$
没算接收机钟差精度因子: T D O P = q 44 T D O P=\sqrt{q_{44}} TDOP=q44
extern void dops(int ns, const double *azel, double elmin, double *dop)
{double H[4*MAXSAT],Q[16],cosel,sinel;int i,n;for (i=0;i<4;i++) dop[i]=0.0;// 根据卫星高度角、方位角构建 H 矩阵for (i=n=0;i<ns&&i<MAXSAT;i++) {if (azel[1+i*2]<elmin||azel[1+i*2]<=0.0) continue;cosel=cos(azel[1+i*2]);sinel=sin(azel[1+i*2]);H[ 4*n]=cosel*sin(azel[i*2]);H[1+4*n]=cosel*cos(azel[i*2]);H[2+4*n]=sinel;H[3+4*n++]=1.0;}if (n<4) return;// H * H^T 得到 Q 矩阵matmul("NT",4,4,n,1.0,H,H,0.0,Q);if (!matinv(Q,4)) {dop[0]=SQRT(Q[0]+Q[5]+Q[10]+Q[15]); /* GDOP */dop[1]=SQRT(Q[0]+Q[5]+Q[10]); /* PDOP */dop[2]=SQRT(Q[0]+Q[5]); /* HDOP */dop[3]=SQRT(Q[10]); /* VDOP */}
}
5. keepEpInfo():保存当前历元信息
6. gfmeas():计算 GF 几何无关组合观测值
L G F ( i ) = λ 1 Φ 1 ( i ) − λ 2 Φ 2 ( i ) L_{\mathrm{GF}}(i)=\lambda_{1} \Phi_{1}(i)-\lambda_{2} \Phi_{2}(i) LGF(i)=λ1Φ1(i)−λ2Φ2(i)
extern double gfmeas(const obsd_t *obs, const nav_t *nav)
{const double *lam=nav->lam[obs->sat-1];if (lam[0]==0.0||lam[1]==0.0||obs->L[0]==0.0||obs->L[1]==0.0) return 0.0;return lam[0]*obs->L[0]-lam[1]*obs->L[1];
}
7. wlAmbMeas():计算 WL 宽巷组合观测值
φ 1 − φ 2 − f 1 − f 2 f 1 + f 2 ( P 1 λ 1 + P 2 λ 2 ) \varphi_{1}-\varphi_{2}-\frac{f_{1}-f_{2}}{f_{1}+f_{2}}\left(\frac{P_{1}}{\lambda_{1}}+\frac{P_{2}}{\lambda_{2}}\right) φ1−φ2−f1+f2f1−f2(λ1P1+λ2P2)
extern double wlAmbMeas(const obsd_t *obs, const nav_t *nav)
{int i=0,j=1;const double *lam=nav->lam[obs->sat-1];double P1,P2,P1_C1,P2_C2,lam1,lam2,res;if (obs->L[i]==0.0) return 0.0;if (obs->L[j]==0.0) return 0.0;if (obs->P[i]==0.0) return 0.0;if (obs->P[j]==0.0) return 0.0;if (lam[i]*lam[j]==0.0) return 0.0;P1=obs->P[i];P2=obs->P[j];P1_C1=nav->cbias[obs->sat-1][1];P2_C2=nav->cbias[obs->sat-1][2];if (obs->code[0]==CODE_L1C) P1+=P1_C1; /* C1->P1 */if (obs->code[1]==CODE_L2C) P2+=P2_C2; /* C2->P2 */lam1=lam[i];lam2=lam[j];res=(obs->L[i]-obs->L[j])-(lam2-lam1)/(lam1+lam2)*(P1/lam1+P2/lam2);return res;
}
四、RINEX 文件读取
1、readobsnav():Rinex 文件读取主入口函数
gtime_t ts 解算开始时间
gtime_t te 解算结束时间
double ti 解算时间间隔
char **infile 传入文件路径数组
const int *index 对应文件下标
int n infile[]元素个数
const prcopt_t *prcopt 处理选项
obs_t *obs 存观测数据OBS
nav_t *nav 存导航电文数据NAV
sta_t *sta 测站结构体,存obs文件头读取到的一部分的信息
index[]的作用:会传给
execses_b(),再传给execses_r(),再传给execses(),再传给readobsnav()。如果不需要根据tu分时间段解算,index存的就是 0~n,如果需要分时间段解算,index存的是对应时间段内文件的下标。
-
先初始化
obs、nav->eph、nav->geph;遍历infile[],如果下标和上一次循环的不同,记录当前index[i]值到ind。调用readrnxt()读取文件,其先调用readrnxfile()读取文件,如果测站名字为空,就给依据头文件自动赋 4 个字符的名字。 -
然后判断是否有观测数据和星历数据,成功读取到数据,就调用
sortobs(),根据 time、rcv、sat ,对obs->data的元素进行排序、去重,得到历元数nepoch。 -
最后调用
uniqnav(),其通过调用uniqeph()、uniqgeph()进行星历数据的排序去重,通过调用satwavelen()获取所有载波相位的波长到nav->lam。
static int readobsnav(gtime_t ts, gtime_t te, double ti, char *infile[MAXINFILE],const int *index, int n, const prcopt_t *prcopt,obs_t *obs, nav_t *nav, sta_t *sta)
{int i,j,ind=0,nobs=0,rcv=1,nep;// 初始化 obs、nav->eph、nav->gephobs->data=NULL; obs->n =obs->nmax =0;nav->eph =NULL; nav->n =nav->nmax =0;nav->geph=NULL; nav->ng=nav->ngmax=0;PPP_Glo.nEpoch=0;// 遍历 infile[],调用readrnxt()读取文件for (i=0;i<n;i++) {// 如果下标和上一次循环的不同,记录当前index[i]值到indif (index[i]!=ind) {if (obs->n>nobs) rcv++;ind=index[i]; nobs=obs->n; }/* read rinex obs and nav file */nep=readrnxt(infile[i],rcv,ts,te,ti,prcopt->rnxopt,obs,nav,rcv<=2?sta+rcv-1:NULL);}// 判断是否有观测数据和星历数据if (obs->n<=0) {printf("*** ERROR: no obs data!\n");return 0;}if (nav->n<=0&&nav->ng<=0) {printf("*** ERROR: no nav data!\n");return 0;}// 调用sortobs(),根据 time、rcv、sat ,对 obs->data 的元素进行排序、去重,得到历元数nepoch/* sort observation data */PPP_Glo.nEpoch=sortobs(obs);// 最后调用uniqnav(),其通过调用 uniqeph()、uniqgeph() 进行星历数据的排序去重,// 通过调用 satwavelen() 获取所有载波相位的波长到 nav->lam。/* delete duplicated ephemeris */uniqnav(nav);/* set time span for progress display */if (ts.time==0||te.time==0) {for (i=0; i<obs->n;i++) if (obs->data[i].rcv==1) break;for (j=obs->n-1;j>=0;j--) if (obs->data[j].rcv==1) break;if (i<j) {if (ts.time==0) ts=obs->data[i].time;if (te.time==0) te=obs->data[j].time;settspan(ts,te);}}// 判断有无 GLONASS 星历,为啥不放在前面???if (prcopt->navsys&SYS_GLO) {if (nav->ng<=0) {printf("*** ERROR: nav->ng<=0!\n");}}return 1;
}
extern int readrnxt(const char *file, int rcv, gtime_t ts, gtime_t te,double tint, const char *opt, obs_t *obs, nav_t *nav,sta_t *sta)
{int i,stat=0;const char *p;char type=' ',*files[MAXEXFILE]={0};/*if (!*file) {return readrnxfp(stdin,ts,te,tint,opt,0,1,&type,obs,nav,sta);}for (i=0;i<MAXEXFILE;i++) {if (!(files[i]=(char *)malloc(1024))) {for (i--;i>=0;i--) free(files[i]);return -1;}}*//* expand wild-card *//*if ((n=expath(file,files,MAXEXFILE))<=0) {for (i=0;i<MAXEXFILE;i++) free(files[i]);return 0;}*//* read rinex files *///for (i=0;i<n&&stat>=0;i++) {// 调用 readrnxfile() 读取文件stat=readrnxfile(file,ts,te,tint,opt,0,rcv,&type,obs,nav,sta);//}// 如果测站名字为空,就给依据头文件自动赋 4 个字符的名字/* if station name empty, set 4-char name from file head */if (type=='O'&&sta) {if (!(p=strrchr(file,FILEPATHSEP))) p=file-1;if (!*sta->name) setstr(sta->name,p+1,4);}for (i=0;i<MAXEXFILE;i++) free(files[i]);return stat;
}
2、readrnxfile():传入文件路径,读取起止时间内数据
-
如果传入了测站信息结构体 sta,调用
init_sta()初始化,值赋 0,指针赋空。 -
根据文件名判断文件来源(COD、IGS、IGR、GFZ、ESA、IAC、其它),以此设置 index。
-
以读的方式打开解压后的文件,调用
readrnxfp(),从文件描述符 fp 中读取文件,读完之后,关闭打开的文件描述符fp。
static int readrnxfile(const char *file, gtime_t ts, gtime_t te, double tint,const char *opt, int flag, int index, char *type,obs_t *obs, nav_t *nav, sta_t *sta)
{FILE *fp;int stat;//char tmpfile[1024];// 如果传入了测站信息结构体 sta,调用 init_sta() 初始化if (sta) init_sta(sta);// 判断文件名长度是否合理if ( strlen(file)<2 ) return ' ';// 以读的方式打开解压后的文件if (!(fp=fopen(file,"r"))) {return ' ';}// 根据文件名判断文件来源(COD、IGS、IGR、GFZ、ESA、IAC、其它),以此设置 index。if (strstr(file,"cod")||strstr(file,"COD")) index=10;else if (strstr(file,"igs")||strstr(file,"IGS")) index=9;else if (strstr(file,"igr")||strstr(file,"IGR")) index=8;else if (strstr(file,"gfz")||strstr(file,"GFZ")) index=7;else if (strstr(file,"esa")||strstr(file,"ESA")) index=6;else if (strstr(file,"iac")||strstr(file,"IAC")) index=-1;else index=0;// 调用 readrnxfp() ,从文件描述符 fp 中读取文件/* read rinex file */stat=readrnxfp(fp,ts,te,tint,opt,flag,index,type,obs,nav,sta);// 读完之后,关闭打开的文件描述符 fpfclose(fp);/* delete temporary file *///if (cstat) remove(tmpfile);return stat;
}
4、readrnxfp():传入文件描述符,调用对应的读取函数
- 调用
readrnxh()读取头文件。并获取文件类型type。 - 根据
type调用对应的函数进行分类读取,readrnxobs()读观测文件,readrnxnav()读星历文件,调用readrnxnav()读钟差文件。
static int readrnxfp(FILE *fp, gtime_t ts, gtime_t te, double tint,const char *opt, int flag, int index, char *type,obs_t *obs, nav_t *nav, sta_t *sta)
{double ver;int sys,tsys;char tobs[NUMSYS][MAXOBSTYPE][4]={{""}};// 调用 readrnxh() 读取头文件。并获取文件类型 type/* read rinex header */if (!readrnxh(fp,&ver,type,&sys,&tsys,tobs,nav,sta)) return 0;// flag 置 0 就不读钟差/* flag=0:except for clock,1:clock */if ((!flag&&*type=='C')||(flag&&*type!='C')) return 0;// 根据 type 调用对应的函数进行分类读取/* read rinex body */switch (*type) {case 'O': return readrnxobs(fp,ts,te,tint,opt,index,ver,tsys,tobs,obs);case 'N': return readrnxnav(fp,opt,ver,sys ,nav);case 'G': return readrnxnav(fp,opt,ver,SYS_GLO,nav);case 'J': return readrnxnav(fp,opt,ver,SYS_QZS,nav); /* extension */case 'L': return readrnxnav(fp,opt,ver,SYS_GAL,nav); /* extension */case 'C': return readrnxclk(fp,opt,index,nav);}return 0;
}
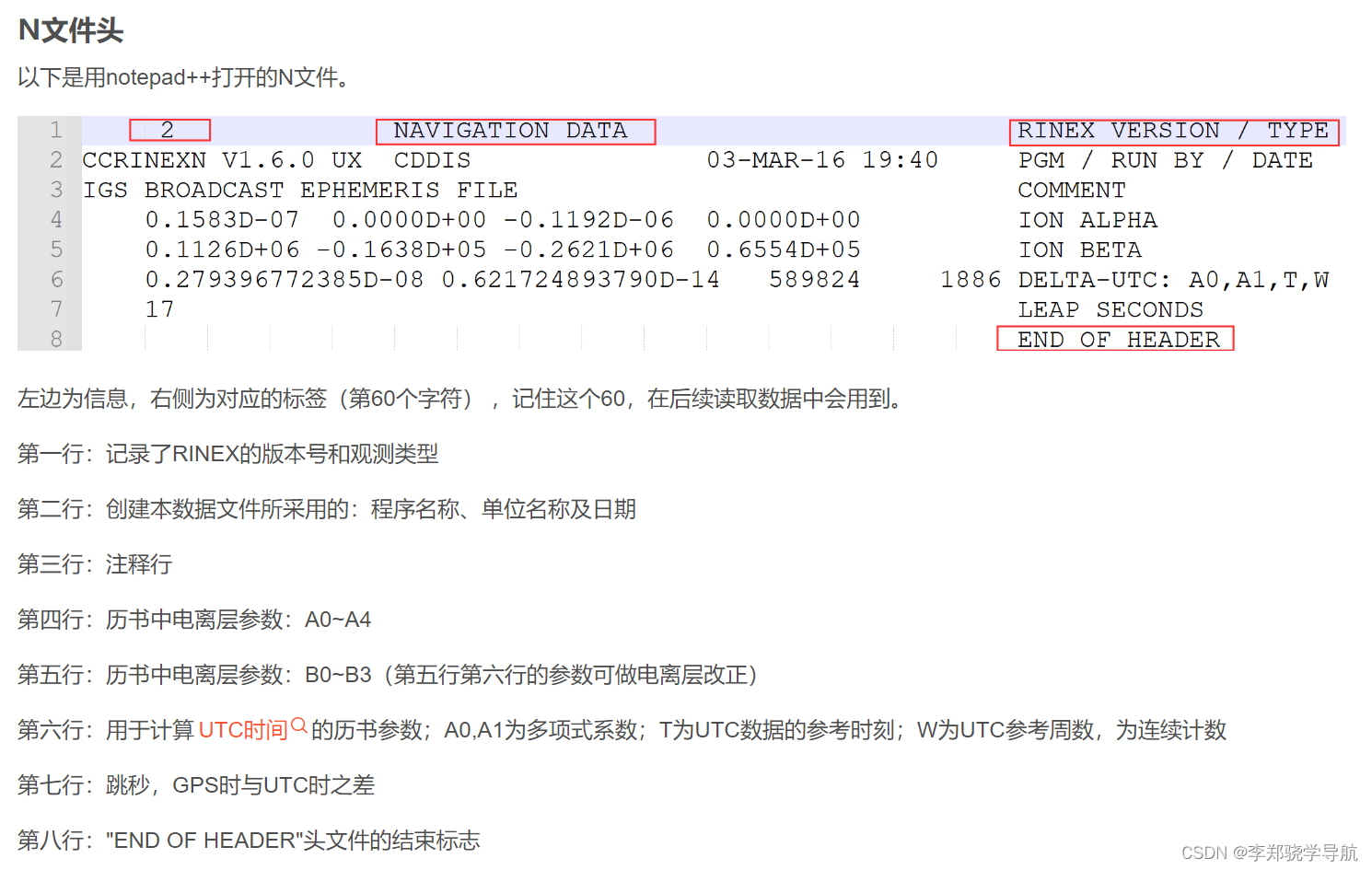
5、readrnxh():读取文件头
- 函数的主体在一个 while 大循环中,循环读取每一行,直到出现 “END OF HEADER”
- 首先进行第一行版本号读取,记录版本号、卫星系统以及观测文件类型。
- PGM / RUN BY / DATE 跳过不读。
- 其它类型的行,根据文件类型,调用
decode_obsh()、decode_navh()、decode_gnavh()、decode_hnavh()、decode_navh()读取。

6、观测文件读取
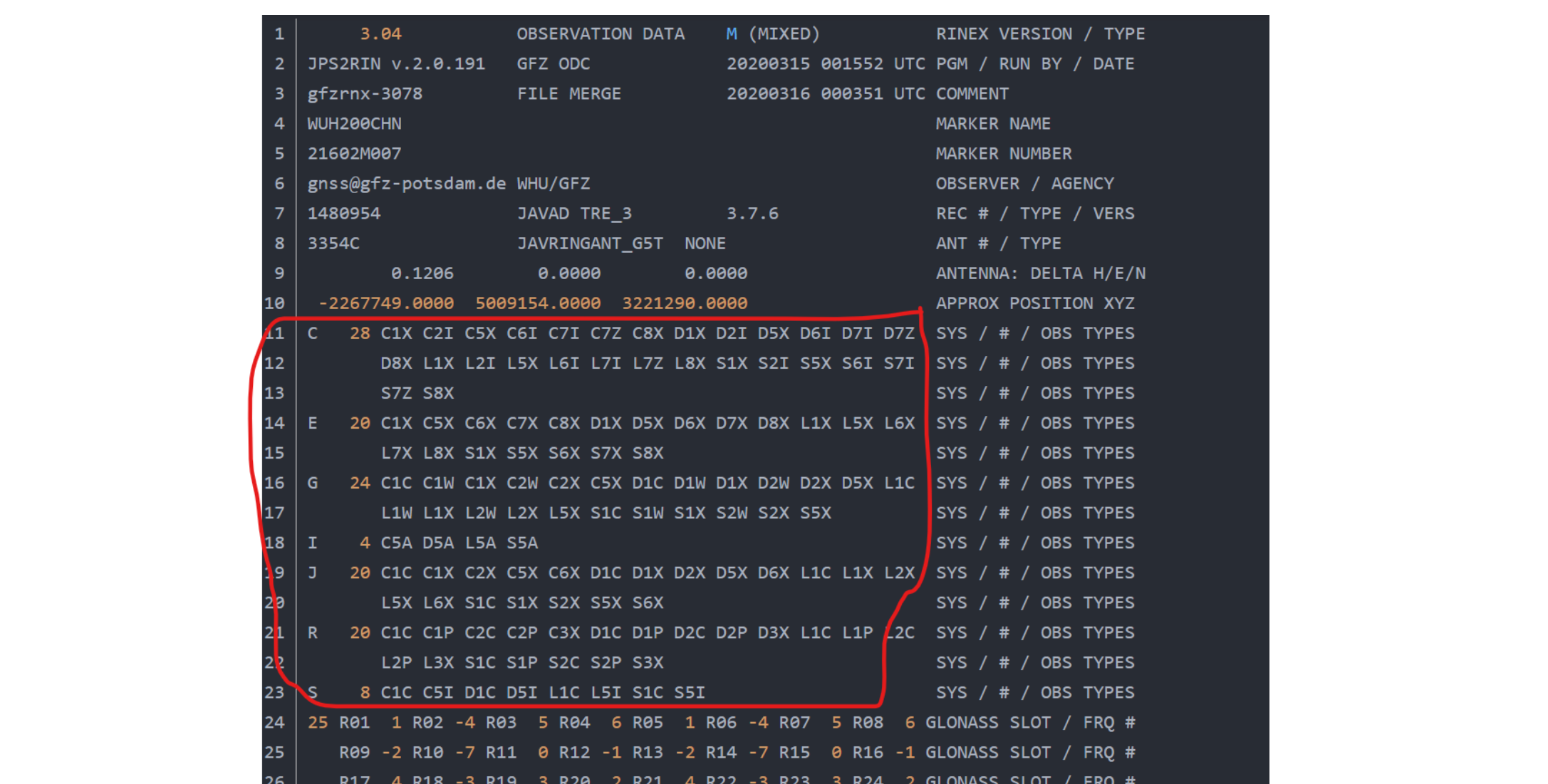
1. decode_obsh():解析观测数据文件头
最关键的是解析观测值类型如下图,存到 tobs 三维数组中,【星座类型】【观测类型】【字符串数】 ,后面读文件体的时候要按文件头的观测值类型来读。
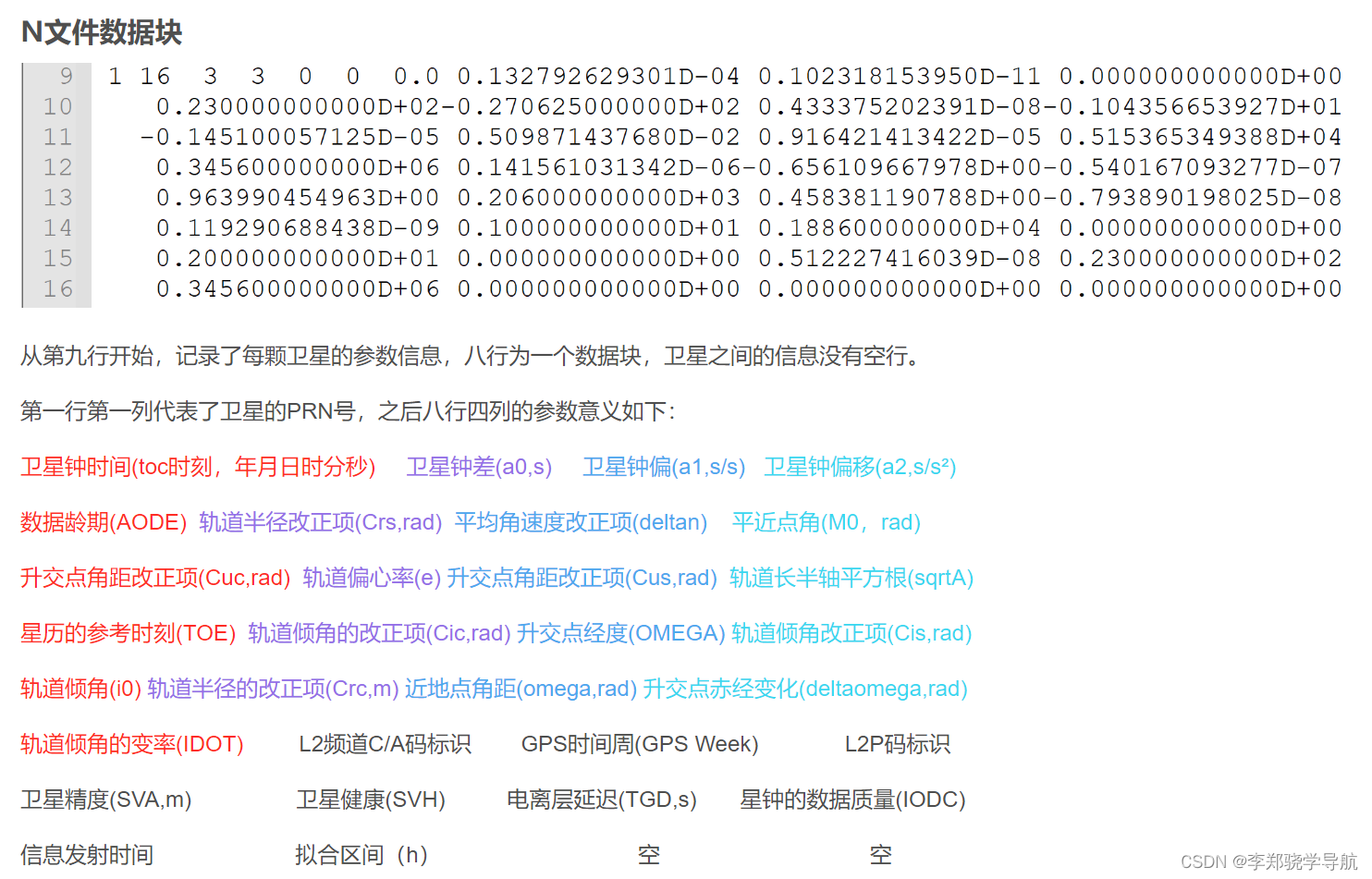
2. readrnxobs():读取o文件中全部观测值数据
重复调用readrnxobsb()函数,直到所有的观测值全被读完,或者是出现了某个历元没有卫星的情况为止
- 为
data[]开辟空间 - while大循环调用
readrnxobsb()每次读取一个历元的观测数据,获取观测值数n - 遍历
data[],如果时间系统为UTC,转为GPST,调用saveslips() - 调用
screent(),判断传入的时间是否符合起始时间ts,结束时间te,时间间隔tint - 遍历
data[],调用restslips(),addobsdata()将data[]信息存到obs中
3. readrnxobsb():读取一个观测历元的观测数据
-
调用
set_sysmask()获取卫星系统掩码mask,mask在之后decode_obsdata()中会用到,mask中没有的卫星系统不用。 -
调用set_index(),将将tobs数组中存的观测值类型信息存到sigind_t类型的index[]结构体数组中,此时传入的tobs数组是二维数组,每个传入的tobs都存了一个卫星系统的观测值类型,同理index[]的一个元素就存一个卫星系统的所有观测值类型。
-
while大循环,fgets()存一行的数据
- 如果是第一行,则调用
decode_obsepoch()函数解码首行数据(包括历元时刻、卫星数、卫星编号、历元状态等信息),并将信息保存 ,获取的卫星数量nsat是判断循环次数的关键。 - 如果不是第一行则调用
decode_obsdata()函数对该行观测数据进行数据解码,读取一个历元内一颗卫星的观测值 ,到data[n] - 知道读取数量 i 等于
decode_obsepoch()获取的卫星数量nsat,结束循环,返回读取的观测值数(卫星数)
- 如果是第一行,则调用
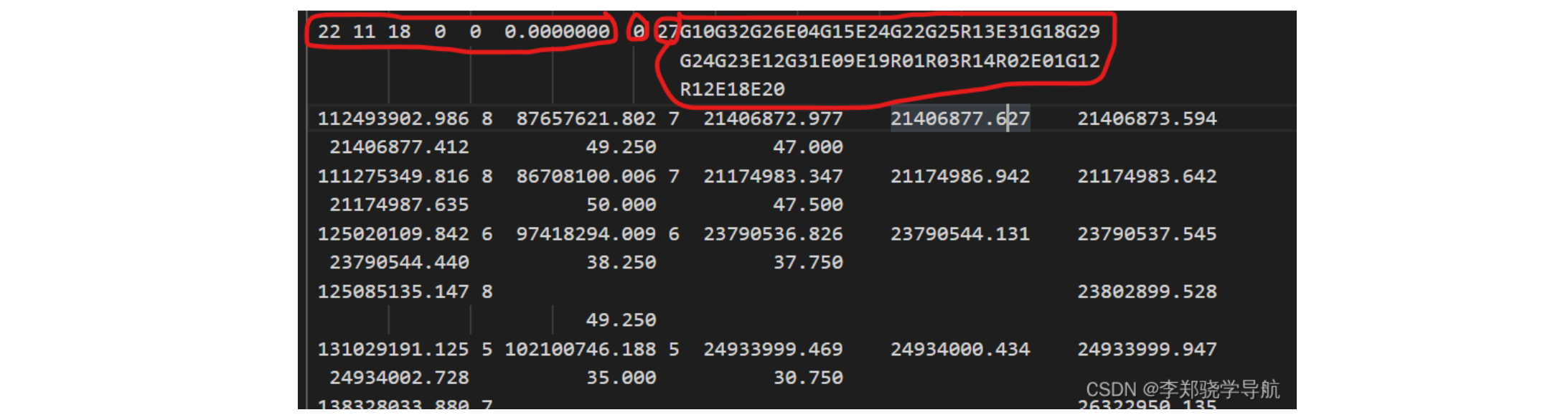
4. decode_obsepoch():解码历元首行数据
2、3版本观测值文件有区别:
-
2版本:
-
每历元首行数据前26位为历元时间(yy mm dd hh mm ss),年是 2 位表示,str2time() 函数中可以把年的前两位也补上。
-
29位epoch flag ,记录该历元状况,0表示正常,3:new site,4:header info,5:external event
-
30~32位为卫星数量
-
33~68:各个卫星的PRN号,观测到的卫星数>12时,一行的信息存储不下会自动换行,并且卫星的PRN号与前一行对其
-
历元信息往下一行就是记录观测值的数据块,以每颗卫星为单位,依照头文件中的观测值类型及顺序,从左到右依次排列,每行记录5个观测值,一行不够时转下行。当所有卫星数据记录完后,转到下一个历元。 观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致。
-
3版本:

- 每历元数据用用**>**开头
- 2~29位为历元时间(yyyy mm dd hh mm ss)
- 32位为 epoch flag
- 后面是接收机钟差(s)
- 每组数据中的每一行表示一颗卫星的观测值,观测值的顺序与文件头中**“SYS / # / OBS TYPES”**记录的观测类型顺序一致
-
执行流程:
- 2版本:
- 读取卫星数到
n - 读取
epoh flag到flag - 读取历元时间
time - 循环读取卫星ID(G10、G32、G26) ,读到68列,还没把卫星读完,就fgets()读取新的一行
- 将卫星ID转为
satellite number,存到sats[]数组中
- 读取卫星数到
- 3版本:
- 读取卫星数量
n - 读取
epoh flag到flag - 读取历元时间
time
- 读取卫星数量
5. decode_obsdata():读取一个历元内一颗卫星的观测值
- 3 版本,读取卫星
satellite number存到obs->sat - 星系统和
mask做与运算,判断卫星系统是否启用 - 根据卫星系统分配索引
ind - 根据索引
ind中的观测值类型,循环读取观测值,读取一个历元内,一颗卫星的观测值,记录有效的观测值到val[i],记录记录信号失锁到lli[i] - 初始化
obs各观测值数组,赋空 - 遍历观测值类型,同频率的观测码,下标分别存到
k[],l[]中 ,p[]存频率索引,后面obs->P[0]就是利用L1载波观测到的伪距,obs->P[1]就是利用L2载波观测到的伪距 - 同一个频率有不同的观测码,取优先级高的
- 根据索引
ind中的观测值类型,遍历观测值,val[i]、lli[i]存入obs中
7、星历文件读取
1. decode_navh()、decode_gnavh()、decode_hnavh()
以decode_navh()为例:
2. readrnxnav():读取星历文件,添加到nav结构体中
- add_eph():nav->eph[] 中添加 eph 星历数据,nav->n 表示 eph 数量。
- add_geph():nav->geph[] 中添加 GLONASS 星历数据,nav->ng 表示 geph 数量。
- add_seph():nav->seph[] 中添加 SBAS 星历数据,nav->ns 表示 seph 数量。
3. readrnxnavb():读取一个历元的星历数据,添加到 eph 结构体中
-
调用
set_sysmask()获取卫星系统掩码 -
循环读取一行行,记录TOC,读取到
data[],i记录读取的数据数量,读够数量调用decode_eph()等函数赋值给eph_t结构体
8、钟差文件读取
这篇关于GAMP源码阅读(上)主要类型、后处理流程、RINEX文件读取的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







