本文主要是介绍1817_ChibiOS的RT线程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
全部学习汇总: GreyZhang/g_ChibiOS: I found a new RTOS called ChibiOS and it seems interesting! (github.com)
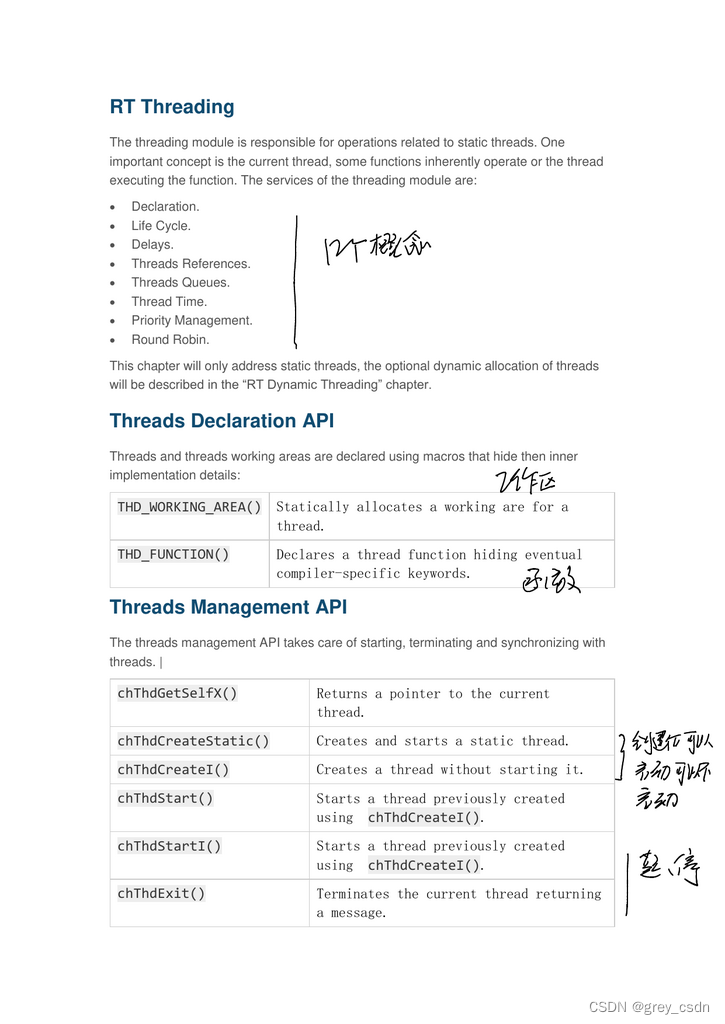
1. 关于线程,有几个概念需要弄清楚:声明、生命循环、延迟、线程引用、线程队列、线程时间、优先级管理、调度。
2. 两个声明的API:工作区(主要是堆栈)声明、线程函数声明。
3. 线程创建提供创建后接着启动的API。
4. 其他的处理比较常规:启动、停止(这里是reset)。
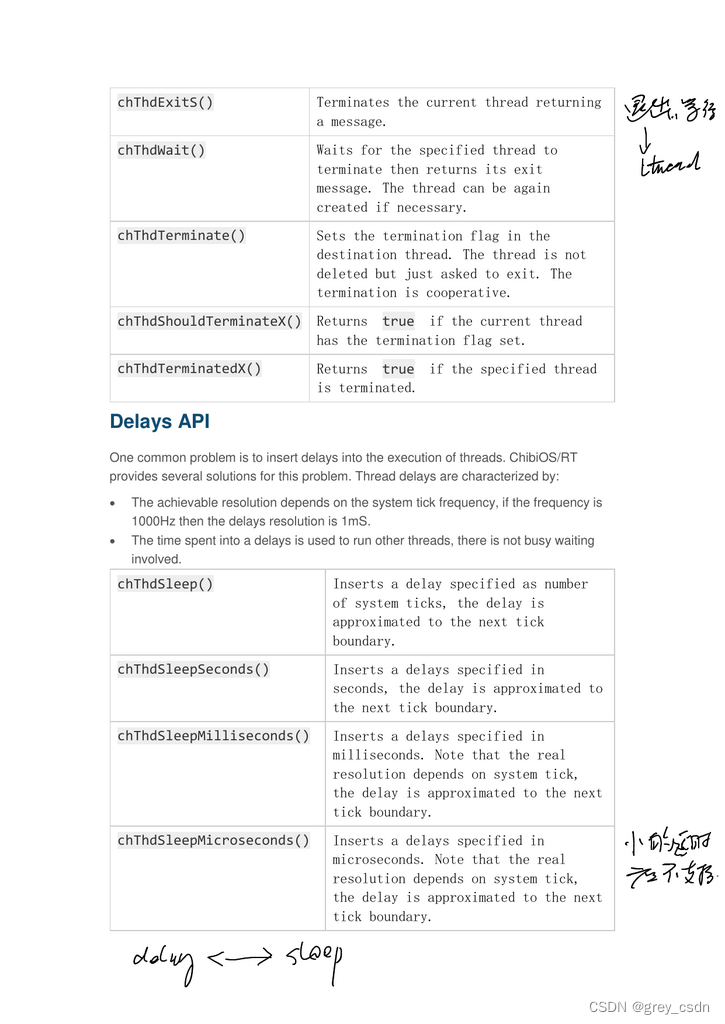
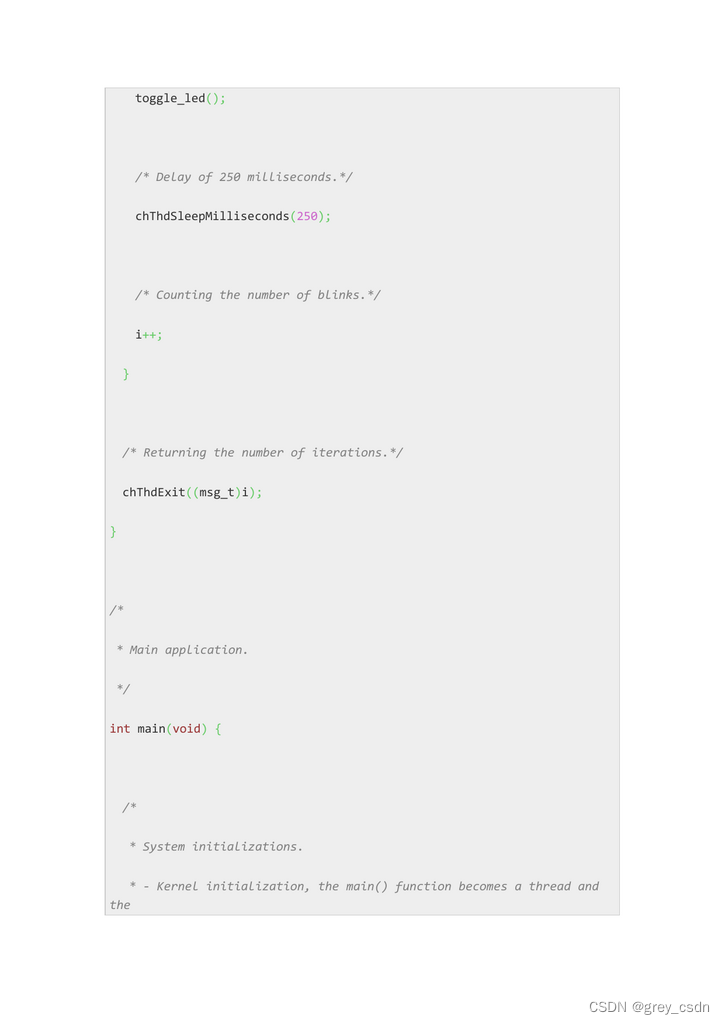
1. 退出以及等待功能,我记得最初的开篇中,作者觉得线程相比task应该有几个特殊的特性。而这个退出返回以及等待就是其中的两点。
2. FreeRTOS中的delay,在这里的对等功能叫做sleep。这里的us延时,从解释看,大概率就是tick的转换。因此,这个小延时或者精准的分辨率应该是支持不了的。
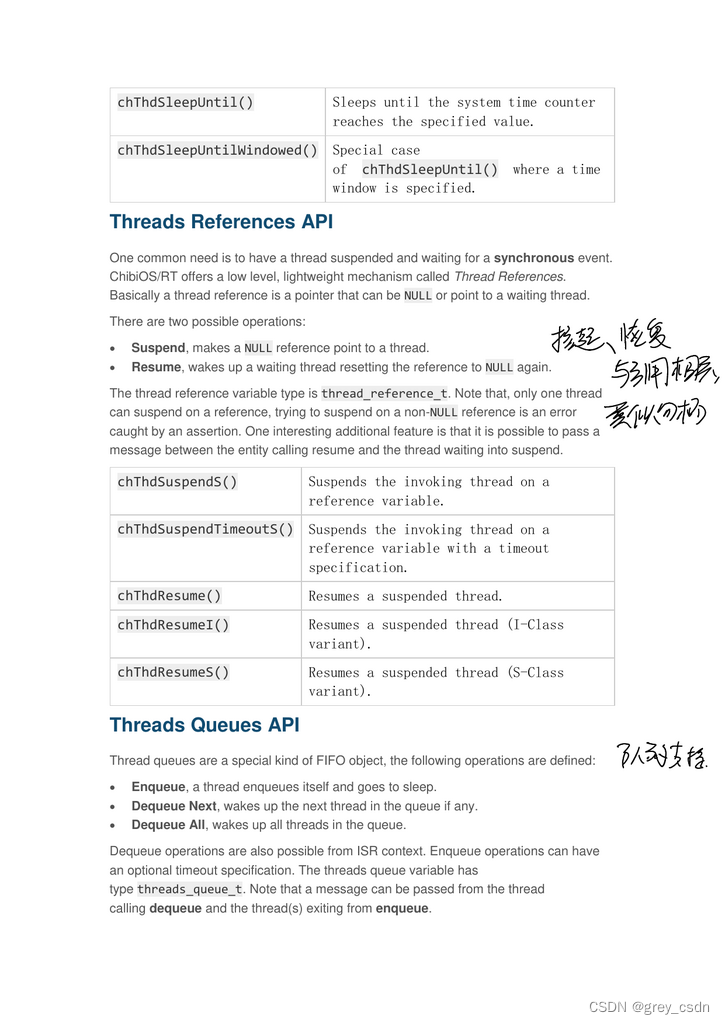
1. 这里的这个引用,可以支持基于此的挂起以及恢复。感觉这个跟其他的OS中的句柄或者文件ID等有一定的类似对。
2. ChibiOS是支持队列机制的。
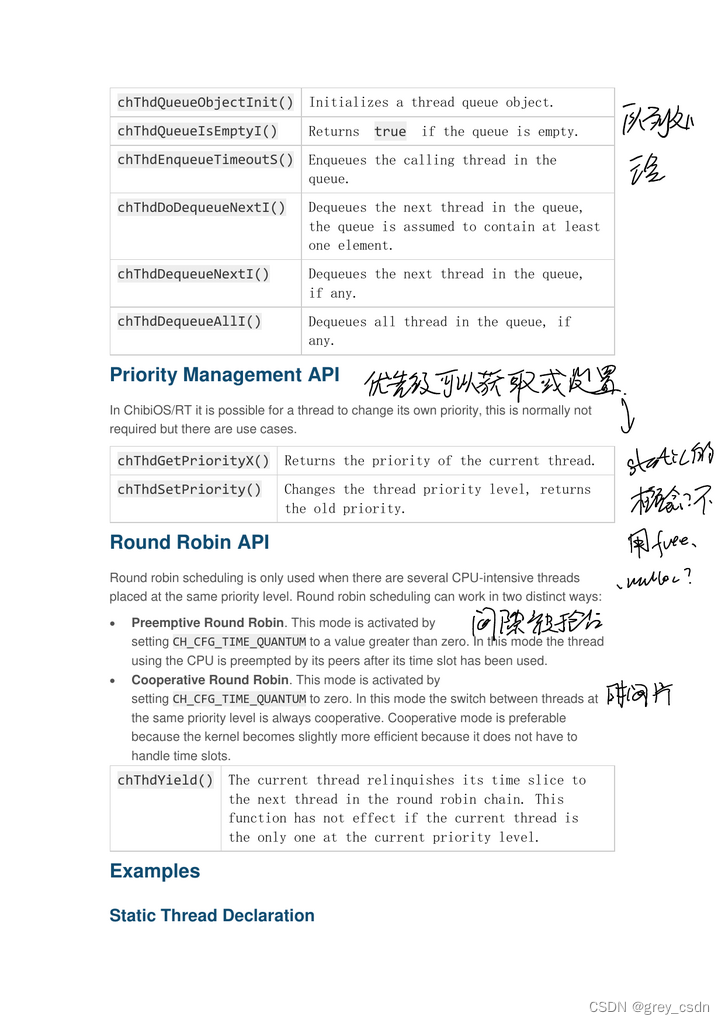
1. 队列的处理,不仅提供的入队出队等操作,还支持一些检查。
2. 可以支持优先级的获取或者设置。我好奇,之前作者提到的静态OS是否包含优先级的静态呢?难道这是后来扩充的内容?或者,所谓的静态应该是不支持free以及malloc这样的操作?
3. 调度里面,抢占式的调度,是说当任务进入到时间间隙的时候会进行抢占。而协同调度,则是一个任务一个时间片来进行平均分派。
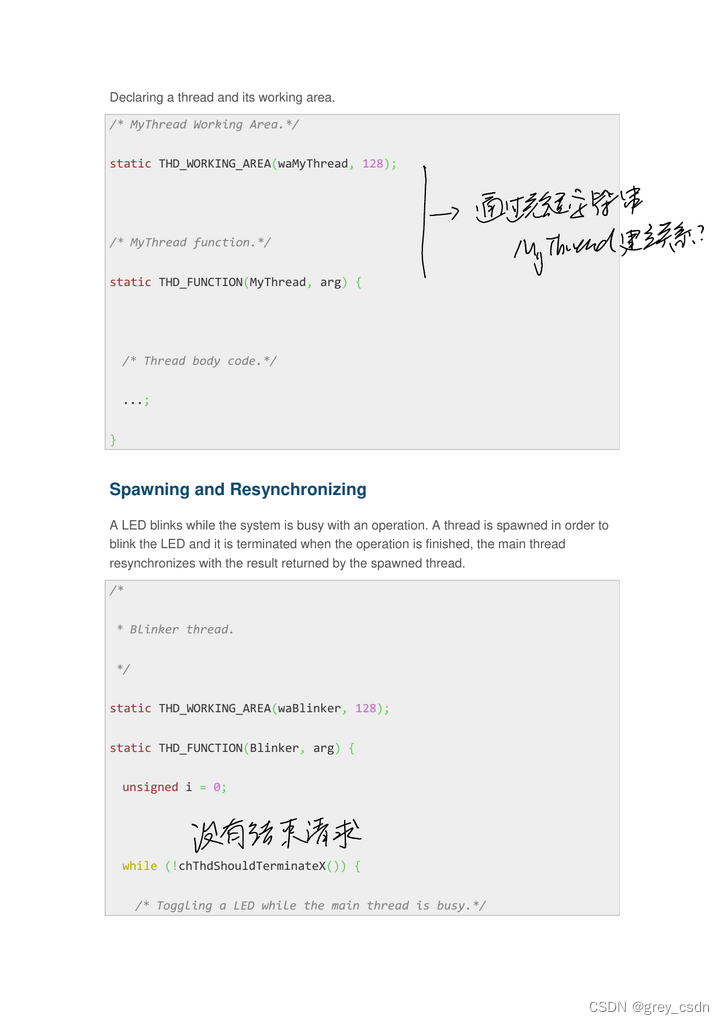
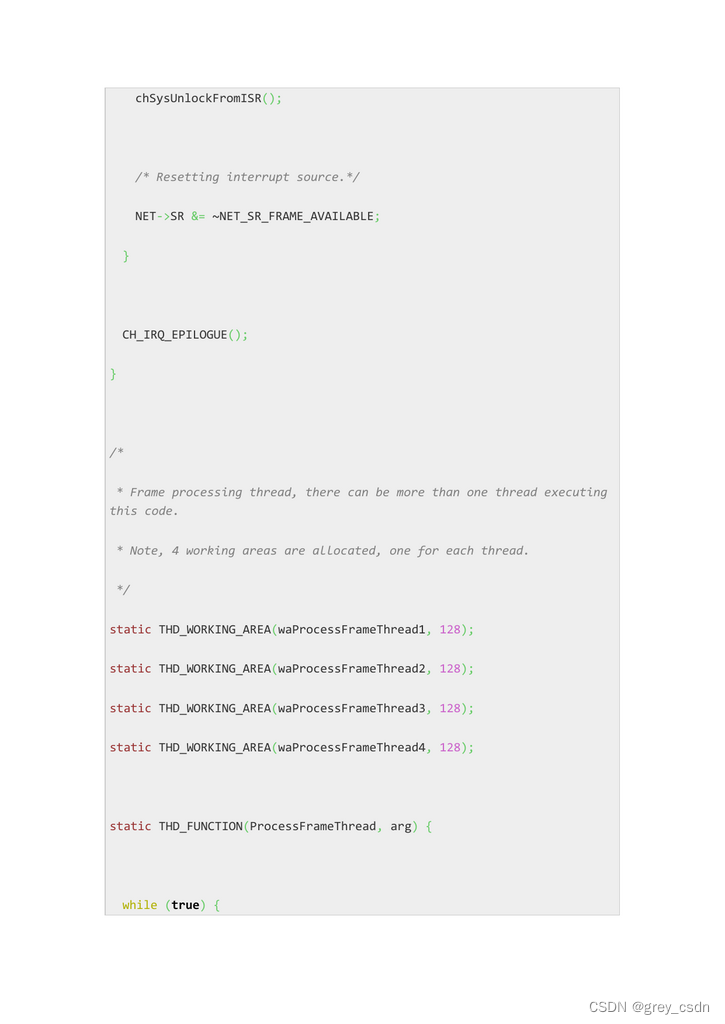
1. 这里米有看到直接的绑定关系,难道这里的绑定是通过字符串来的?
2. 下面的代码中,有一个没有结束请求判断。
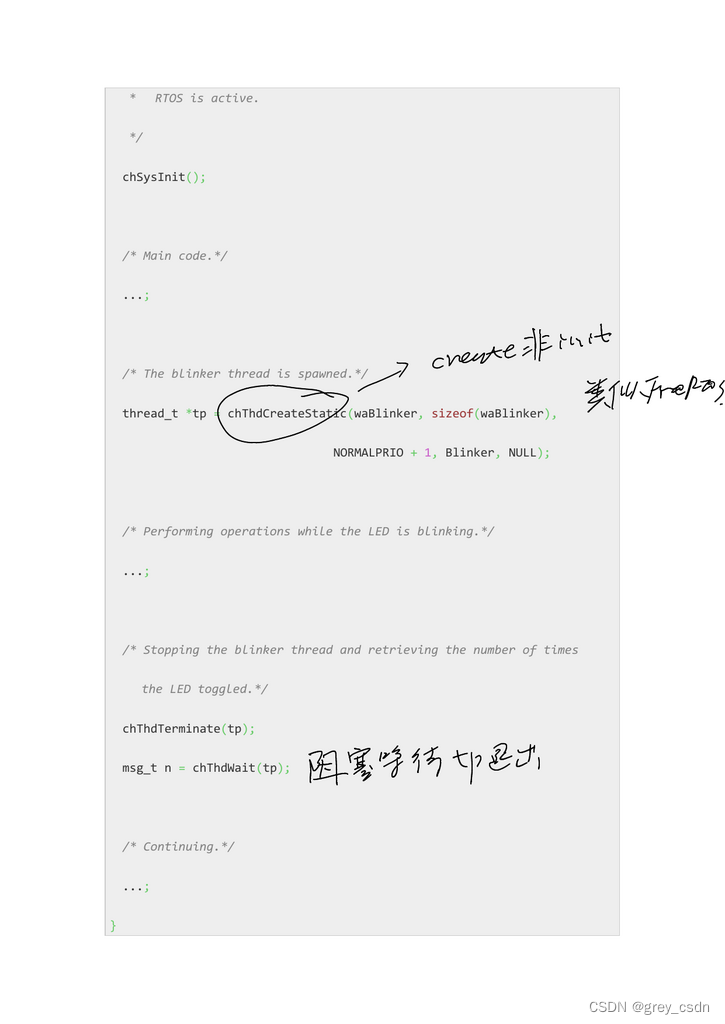
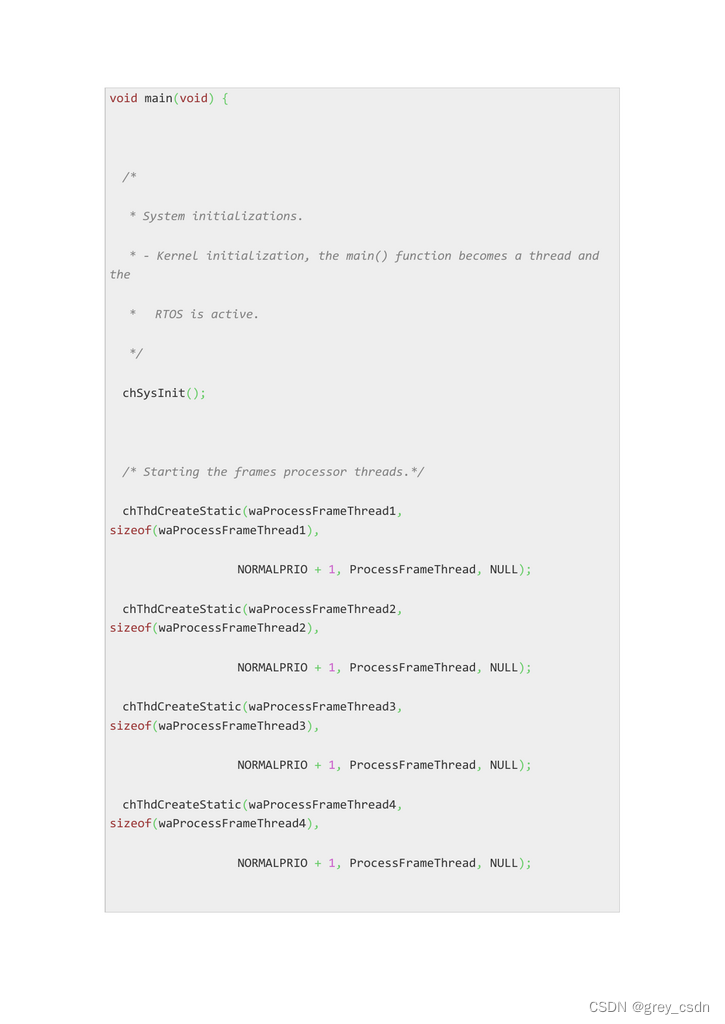
1. 这里的任务创建接口名称也是create不是叫做init,这里又让我觉得这个跟FreeRTOS有点类似了。
2. 后面标注出来的等待,其实是一个阻塞的处理等待tp关联的线程执行结束。

这里的这个任务模式我更熟悉,而这个也是FreeRTOS的模式。
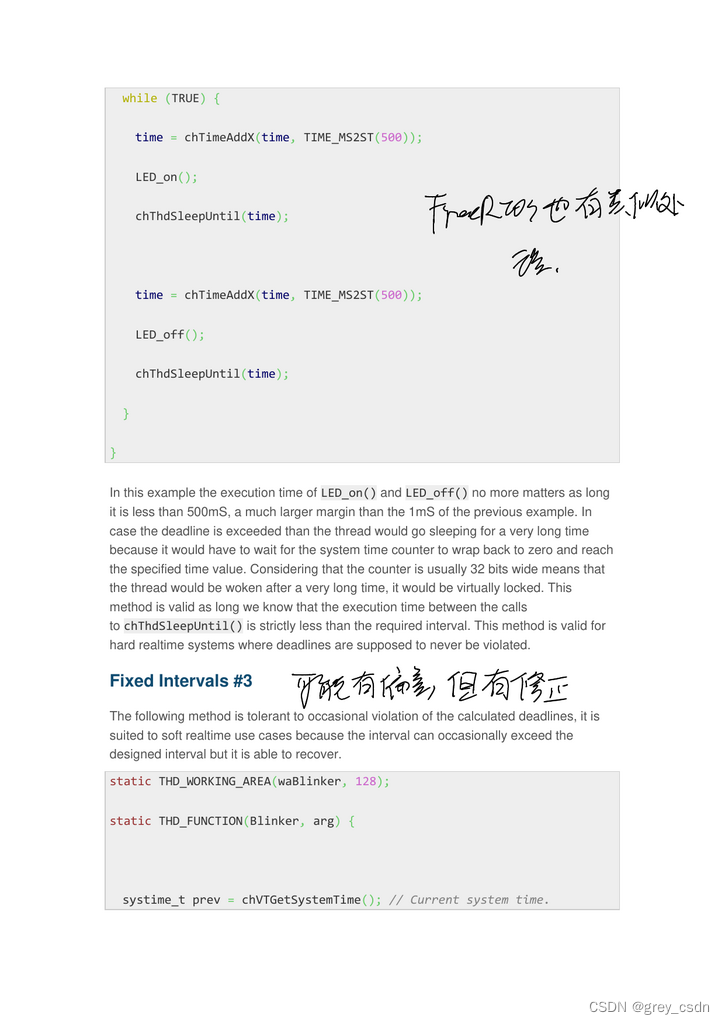
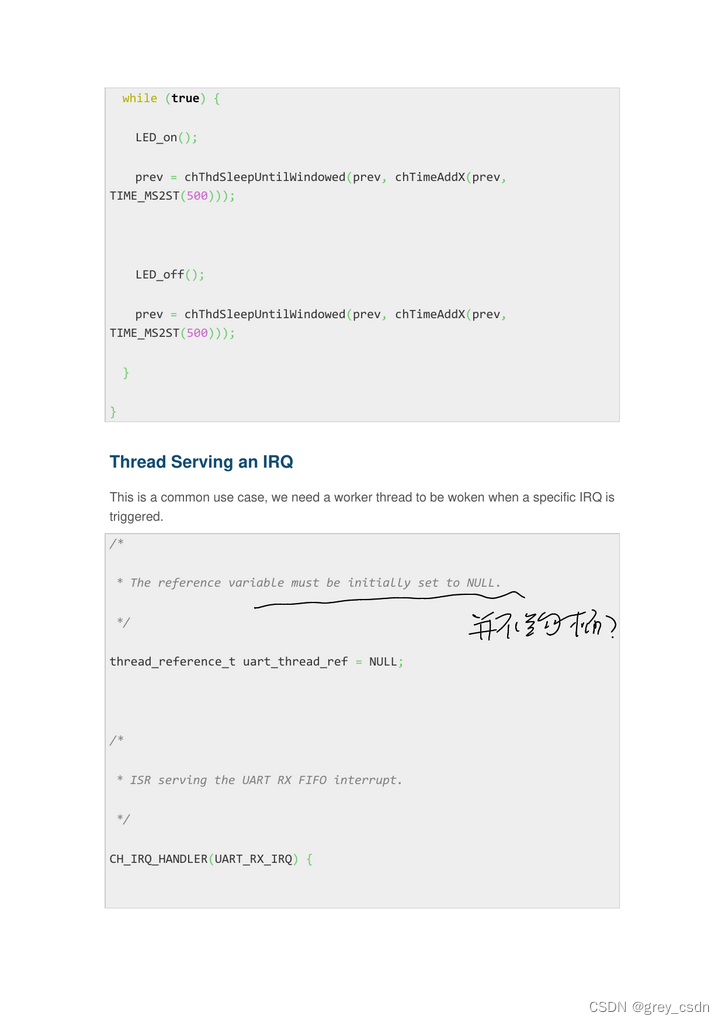
1. sleepuntil,这个接口在FreeRTOS中也有一个类似的delay接口。
2. 第二个例子,则是带有一定的修正的一种delay,但是在每一次的动作上可能会有偏差。
3. 这里的这个参考,从注释看需要初始化为NULL,这么看难道这个并不是一个句柄处理?

恢复线程操作的时候,可以发送信息。这个也可以联系到之前的一些描述,消息只能够从切换出去的任务传递给切换进来的线程。
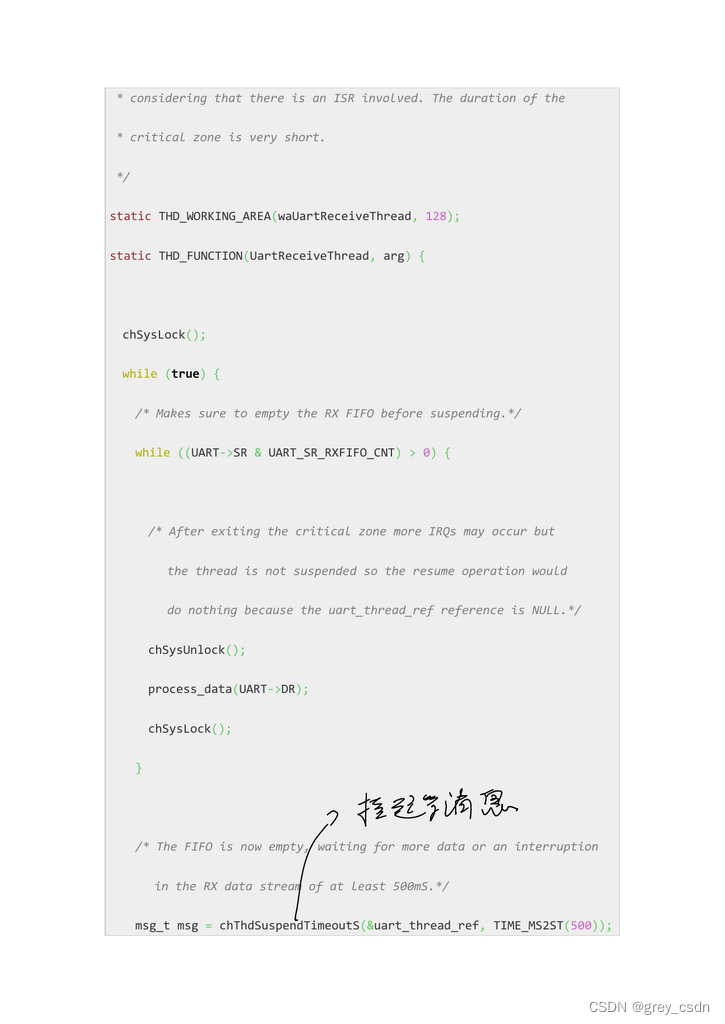
这里的用法是挂起等消息。
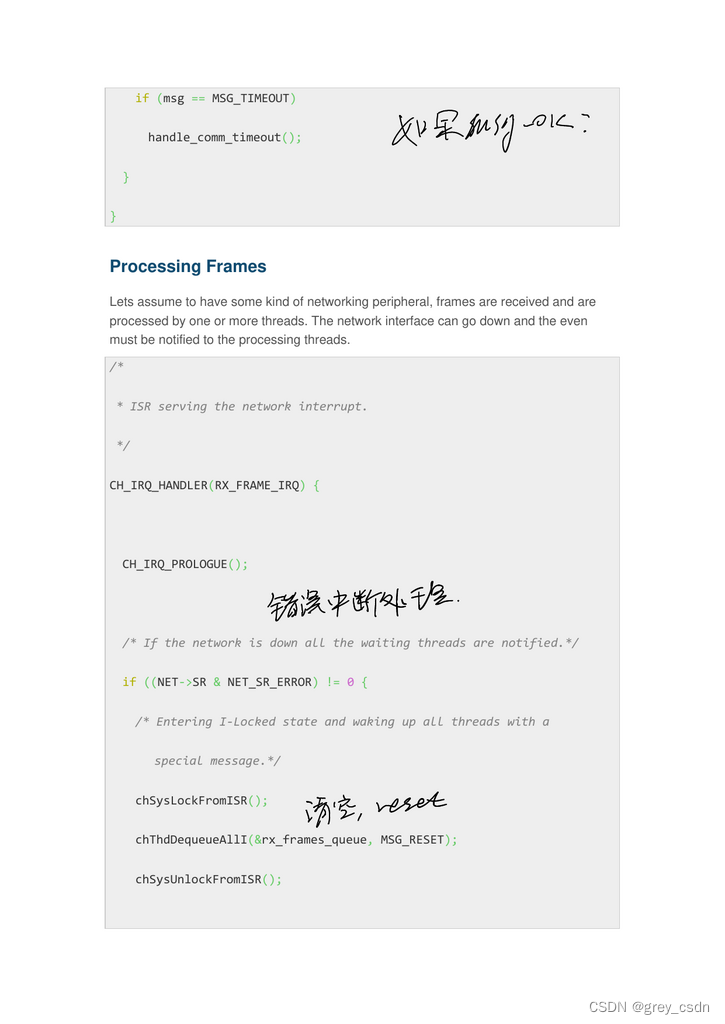
1. 第一段代码,其实还漏掉了一部分处理,也就是MSG_OK的时候。
2. 第二段是错误中断处理,中间有一个清空的过程,也就是对一个消息队列进行reset。
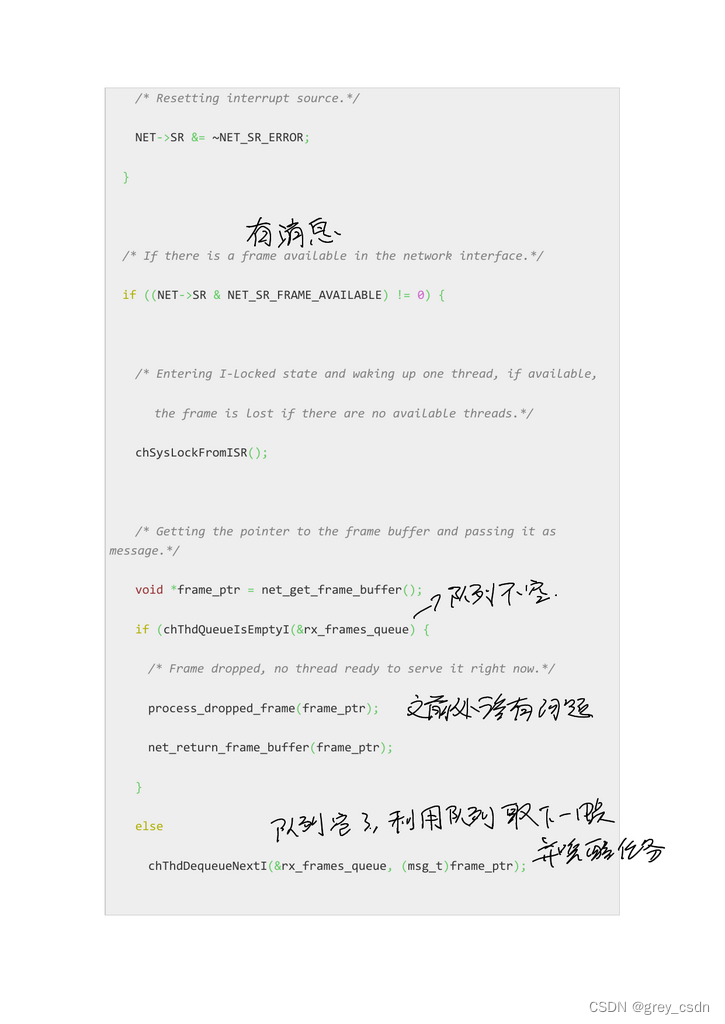
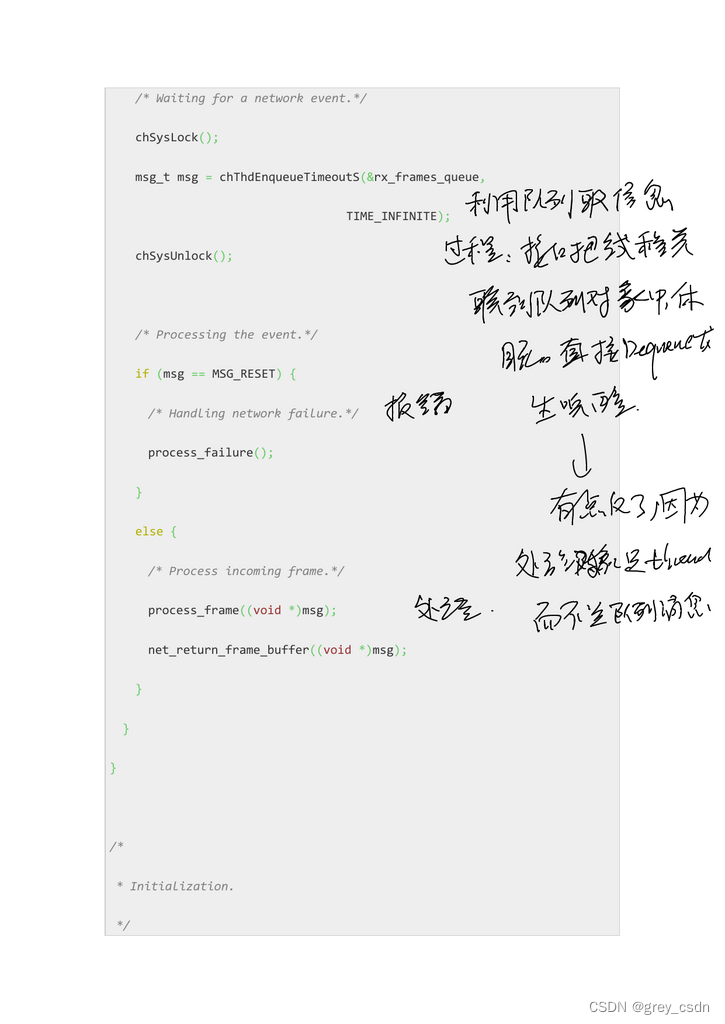
这里的这个例子中表达的设计其实跟FreeRTOS中的队列用法差不多,但是这里的设计概念是有一点不同的。FreeRTOS中的队列,其实是一个消息的队列。但是ChibiOS中的队列其实是一个线程的队列,而这样,入队的时候其实是安排队列去等待某一个消息,出队的时候则是取到了消息之后离开。
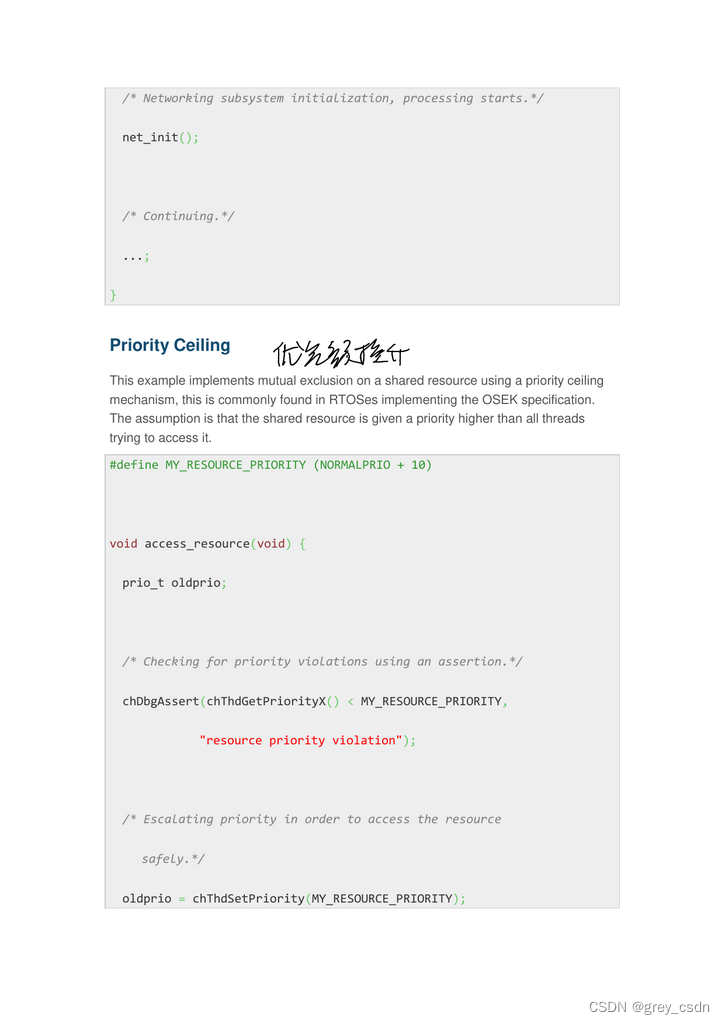
这里提到了一个优先级的提升,可以用来解决优先级翻转的一些问题。看之前的介绍的时候,我还以为ChibiOS中没有这样的机制,但是看起来还是有的。只是,这个是在用户代码中自己判断而不是OS级别做这样的支持。
最后的一个例子是协同调度的一个例子,我觉得这个倒是没有什么太多需要去理解分析的。整体的处理,跟其他的OS处理的方式也差不多。
这篇关于1817_ChibiOS的RT线程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






