本文主要是介绍电子时钟制作(瑞萨RA)(9)----读取DHT11温湿度数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
概述
本篇介绍如何驱动DH11湿度传感器同时实现当前串口数据打印。
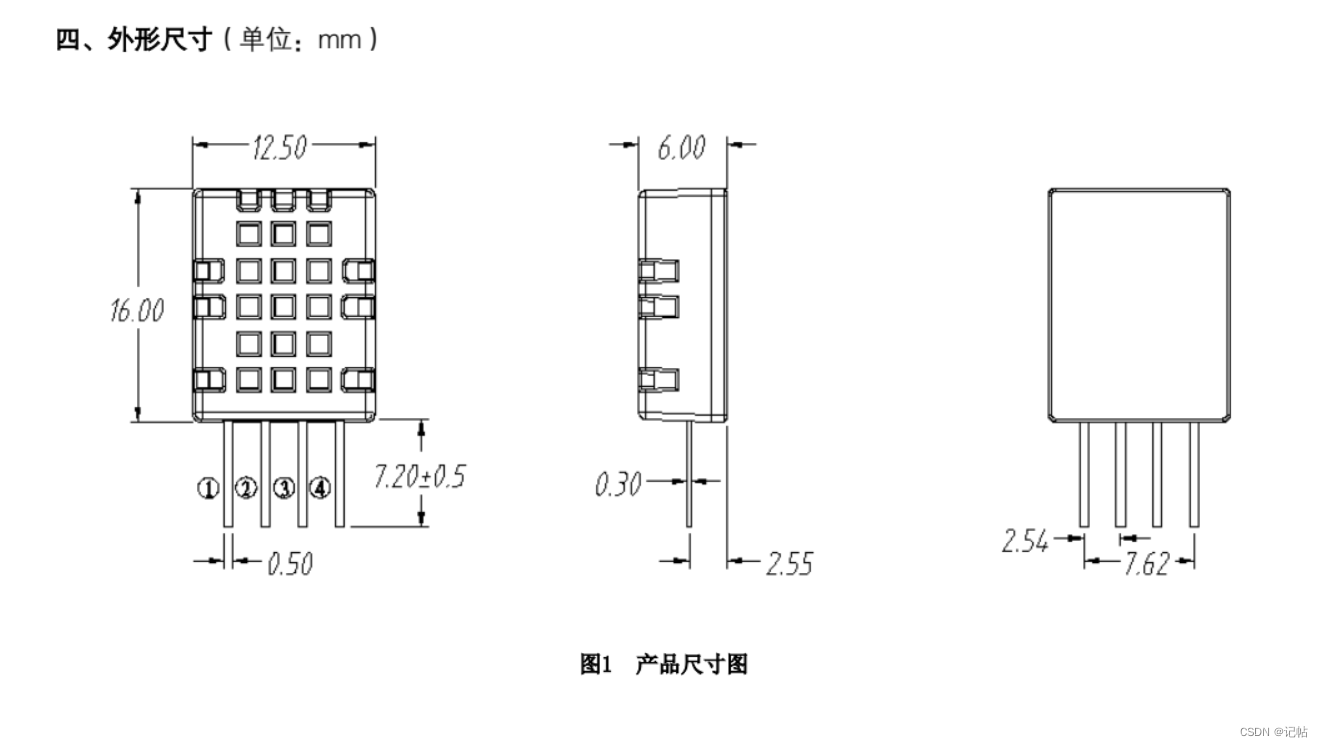
DHT11 数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器。
硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号R7FA2E1A72DFL的开发板:


视频教程
https://www.bilibili.com/video/BV1VX4y1H7Fi/
电子时钟制作(9)----读取DH11温湿度数据
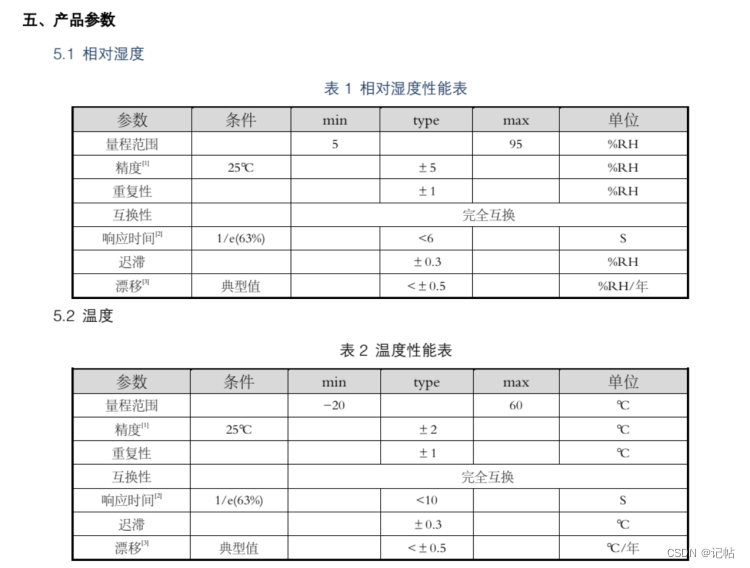
产品参数
温度测测量范围为-20-60℃,湿度的策略范围为5-95%RH。
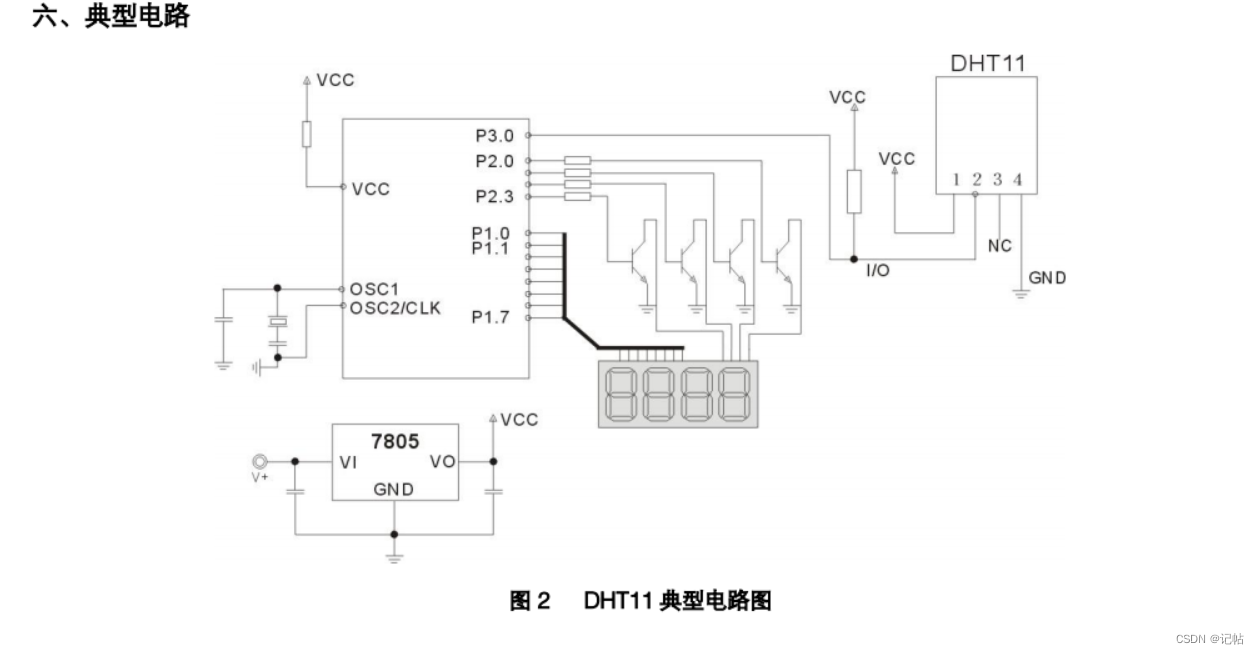
电路设置
1.典型应用电路中建议连接线长度短于 5m 时用 4.7K 上拉电阻,大于 5m 时根据实际情况降低上拉电
阻的阻值。
2. 使用 3.3V 电压供电时连接线尽量短,接线过长会导致传感器供电不足,造成测量偏差。
3. 每次读出的温湿度数值是上一次测量的结果,欲获取实时数据,需连续读取 2 次,但不建议连续多次
读取传感器,每次读取传感器间隔大于 2 秒即可获得准确的数据。
4. 电源部分如有波动,会影响到温度。如使用开关电源纹波过大,温度会出现跳动。
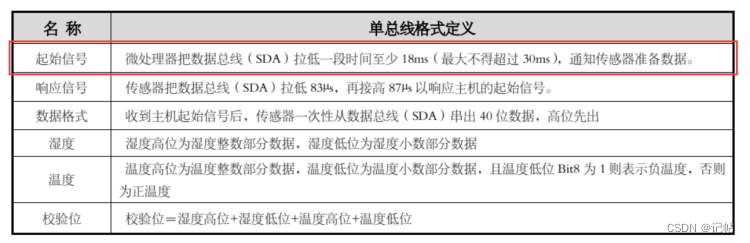
数据格式
DHT11 器件采用简化的单总线通信。单总线即只有一根数据线,系统中的数据交换、控制均由单总线完成。设备(主机或从机)通过一个漏枀开路或三态端口连至该数据线,以允许设备在不发送数据时能够释放总线,而让其它设备使用总线;单总线通常要求外接一个约 4.7kΩ 的上拉电阻,这样,当总线闲置时,其状态为高电平。由于它们是主从结极,只有主机呼叫从机时,从机才能应答,因此主机访问器件都必须严格遵循单总线序列,如果出现序列混乱,器件将不响应主机。
DATA 用于微处理器与 DHT11 之间的通讯和同步,采用单总线数据格式,一次传送 40 位数据,高位先出。
数据格式:
8bit 湿度整数数据 + 8bit 湿度小数数据 + 8bit 温度整数数据 + 8bit 温度小数数据 + 8bit 校验位。
注:其中湿度小数部分为 0。

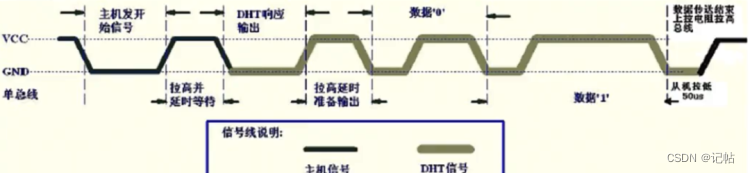
数据读取步骤
步骤一:
DHT11 上电后(DHT11 上电后要等待 1S 以越过不稳定状态在此期间不能发送任何指令),测试环境
温湿度数据,并记录数据,同时 DHT11 的 DATA 数据线由上拉电阻拉高一直保持高电平;此时 DHT11 的DATA 引脚处于输入状态,时刻检测外部信号。
步骤二:
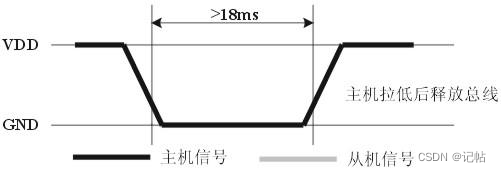
微处理器的 I/O 设置为输出同时输出低电平,且低电平保持时间不能小于 18ms(最大不得超过30ms),
然后微处理器的 I/O 设置为输入状态,由于上拉电阻,微处理器的 I/O 即 DHT11 的 DATA 数据线也随之变高,等待 DHT11 作出回答信号,发送信号如图所示:
步骤三:
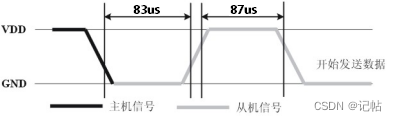
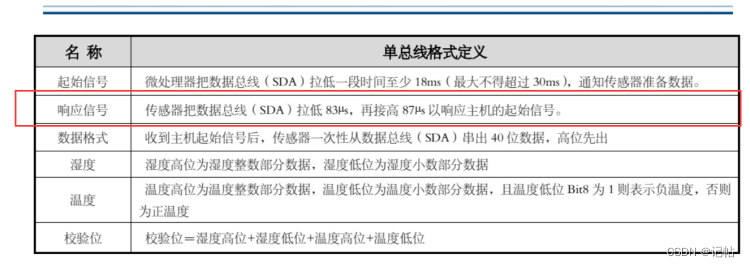
DHT11 的 DATA 引脚检测到外部信号有低电平时,等待外部信号低电平结束,延迟后 DHT11 的 DATA引脚处于输出状态,输出 83 微秒的低电平作为应答信号,紧接着输出 87 微秒的高电平通知外设准备接收数据,微处理器的 I/O 此时处于输入状态,检测到 I/O 有低电平(DHT11 回应信号)后,等待 87 微秒的高电平后的数据接收,发送信号如图所示:
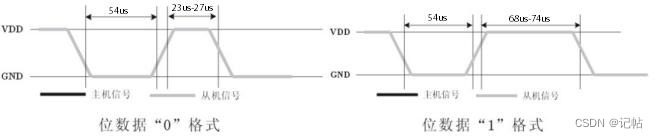
由 DHT11 的 DATA 引脚输出 40 位数据,微处理器根据 I/O 电平的变化接收 40 位数据,位数据“0”的格式为: 54 微秒的低电平和 23-27 微秒的高电平,位数据“1”的格式为: 54 微秒的低电平加 68-74微秒的高电平。位数据“0”、“1”格式信号如图所示:

整理后数据如下所示。
GPIO设置
DHT11温湿度模块如下所示。
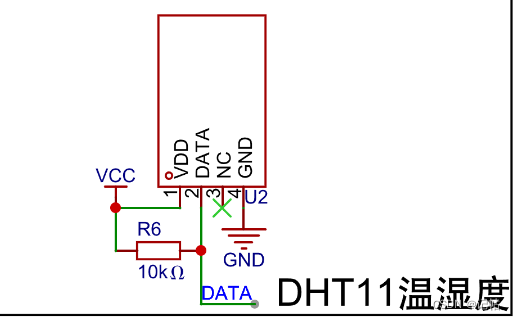
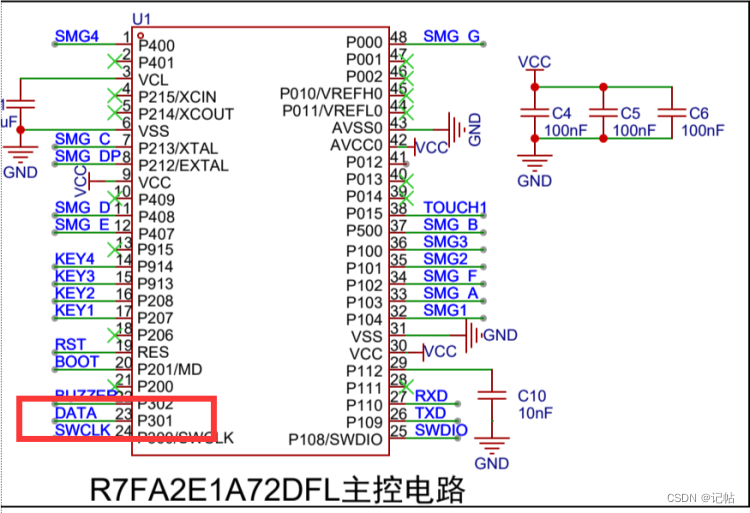
对应的数据口如下所示,为P301。
由于需要去配置
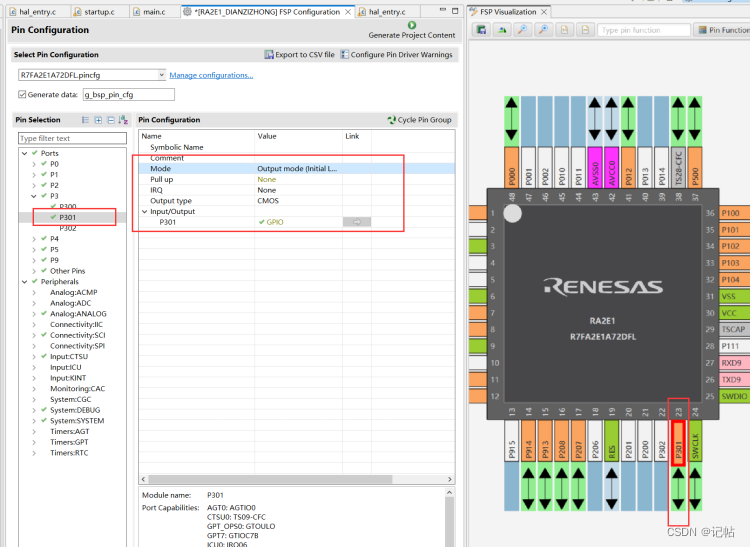
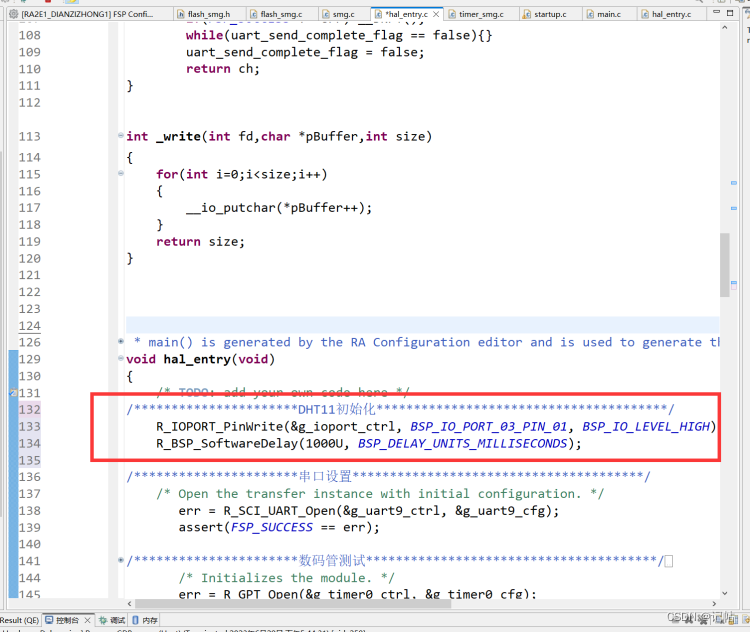
上述中,可以添加延时1s在让程序跑起来,使得温湿度传感器稳定。
/**********************DHT11初始化***************************************/ R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, BSP_IO_LEVEL_HIGH);R_BSP_SoftwareDelay(1000U, BSP_DELAY_UNITS_MILLISECONDS);
可以通过R_IOPORT_PinCfg ()进行IO修改。
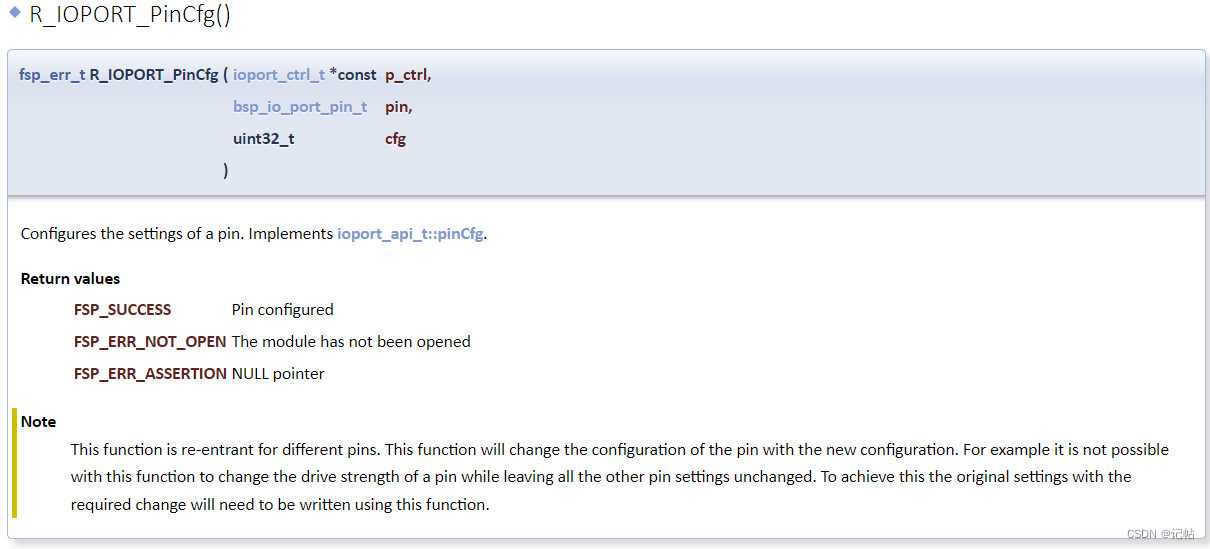
例如设置为输入状态。
//DATA设为输入状态R_IOPORT_PinCfg(&g_ioport_ctrl,BSP_IO_PORT_03_PIN_01,((uint32_t) IOPORT_CFG_PORT_DIRECTION_INPUT));读取温湿度数据
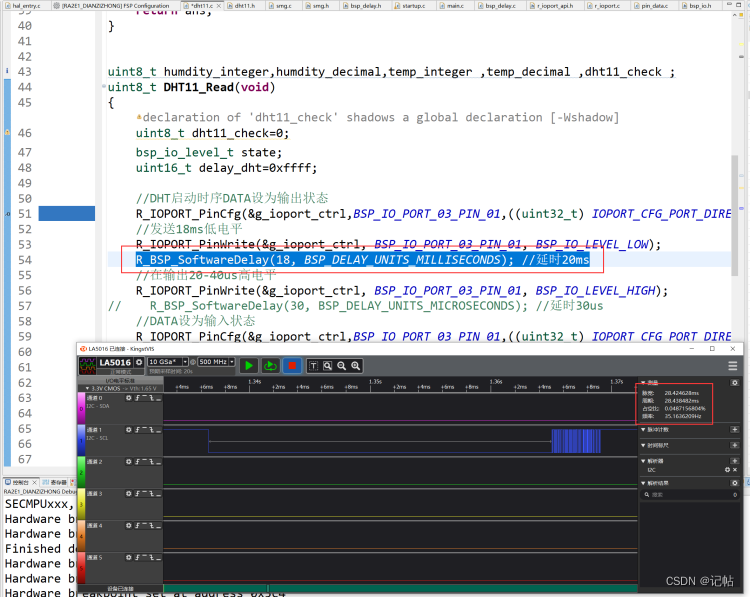
由于使用的是内部晶振,故精确度肯定是不如外部晶振的,对应的时间需要稍作修改。
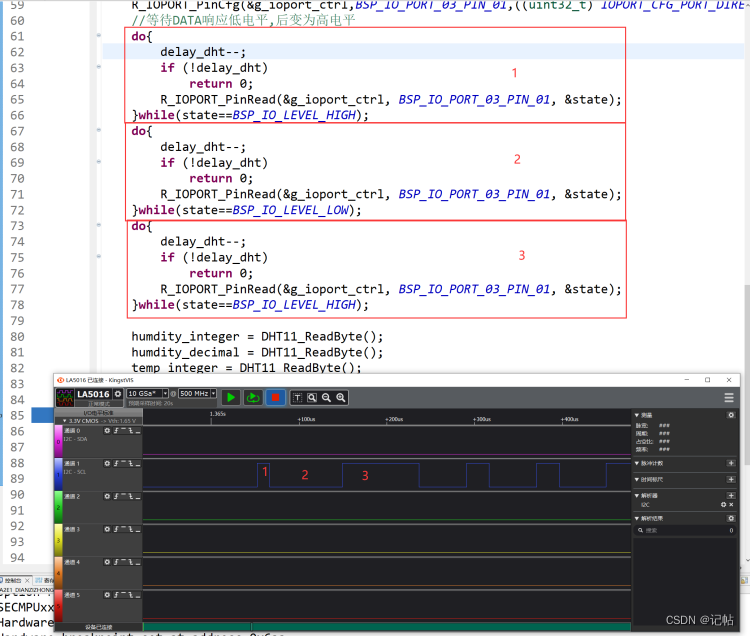
起始信号如下图所示。
相应信号如下图所示。
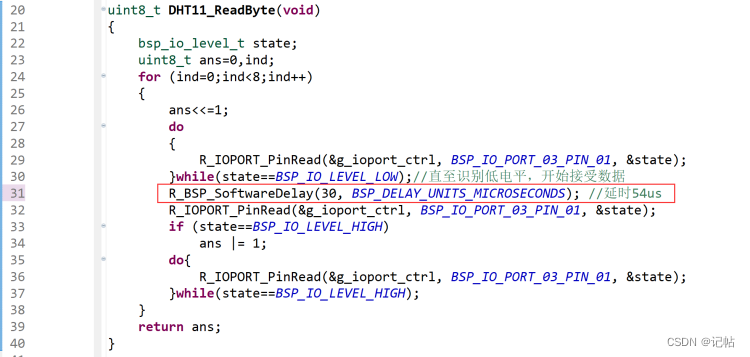
若数据无法正常读取出来,可以适当修改如下的us延时。
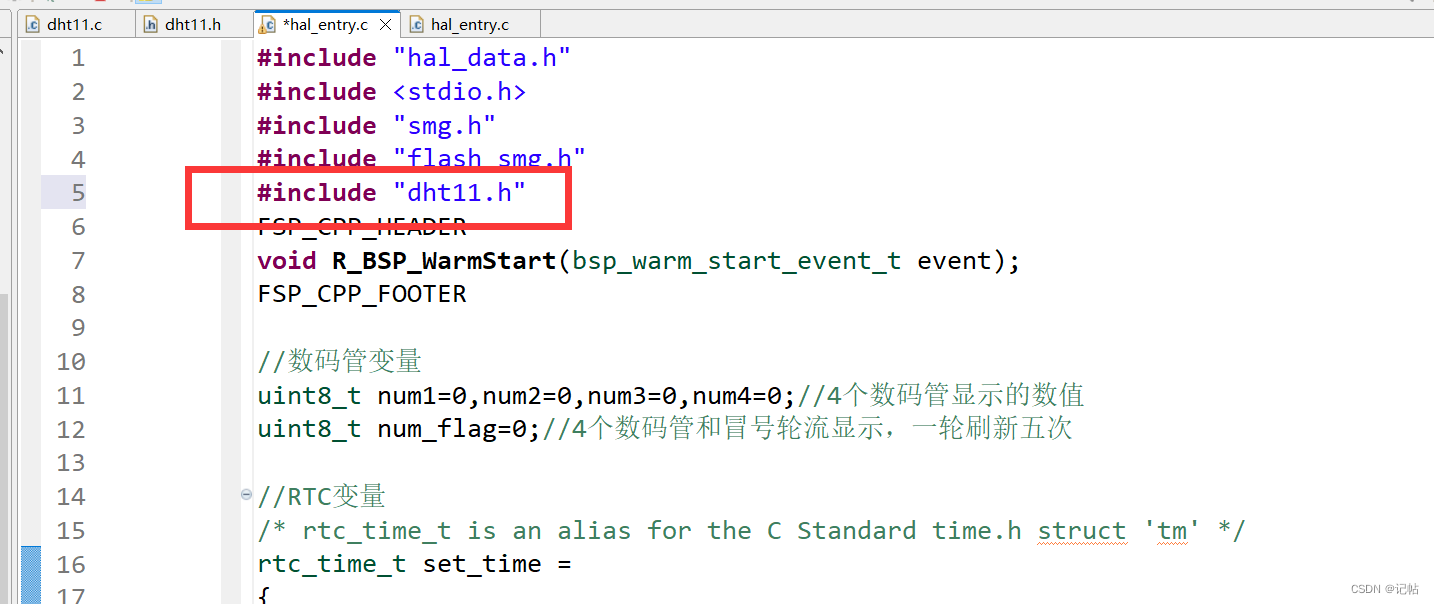
注意在主程序中引入对应的头文件。
#include "dht11.h"
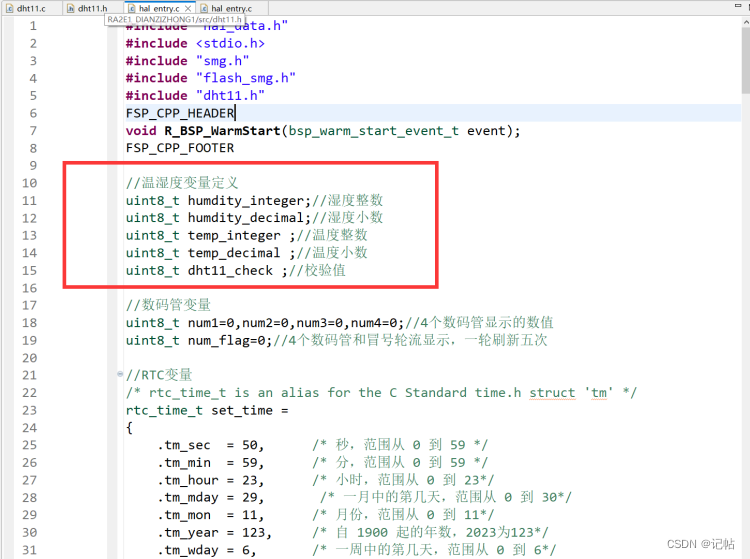
温湿度变量需要在主程序中进行定义。
//温湿度变量定义
uint8_t humdity_integer;//湿度整数
uint8_t humdity_decimal;//湿度小数
uint8_t temp_integer ;//温度整数
uint8_t temp_decimal ;//温度小数
uint8_t dht11_check ;//校验值
在主程序中每5S读一次数据。
if(rtc_second%5==0)//5S读一次{DHT11_Read();printf("hum=%d temp=%d\n",humdity_integer,temp_integer);}
dht11.c
/** dht11.c** Created on: 2023年6月29日* Author: a8456*/
#include "dht11.h"extern fsp_err_t err ;uint8_t DHT11_ReadByte(void)
{bsp_io_level_t state;uint8_t ans=0,ind;for (ind=0;ind<8;ind++){ans<<=1;do{R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);}while(state==BSP_IO_LEVEL_LOW);//直至识别低电平,开始接受数据R_BSP_SoftwareDelay(30, BSP_DELAY_UNITS_MICROSECONDS); //延时54usR_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);if (state==BSP_IO_LEVEL_HIGH)ans |= 1;do{R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);}while(state==BSP_IO_LEVEL_HIGH);}return ans;
}extern uint8_t humdity_integer;//湿度整数
extern uint8_t humdity_decimal;//湿度小数
extern uint8_t temp_integer ;//温度整数
extern uint8_t temp_decimal ;//温度小数
extern uint8_t dht11_check ;//校验值
uint8_t DHT11_Read(void)
{uint8_t dht11_check=0;bsp_io_level_t state;uint16_t delay_dht=0xffff;//DHT启动时序DATA设为输出状态R_IOPORT_PinCfg(&g_ioport_ctrl,BSP_IO_PORT_03_PIN_01,((uint32_t) IOPORT_CFG_PORT_DIRECTION_OUTPUT | (uint32_t) IOPORT_CFG_PORT_OUTPUT_HIGH));//发送18ms低电平R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, BSP_IO_LEVEL_LOW);R_BSP_SoftwareDelay(18, BSP_DELAY_UNITS_MILLISECONDS); //延时20ms//在输出20-40us高电平R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, BSP_IO_LEVEL_HIGH);
// R_BSP_SoftwareDelay(30, BSP_DELAY_UNITS_MICROSECONDS); //延时30us//DATA设为输入状态R_IOPORT_PinCfg(&g_ioport_ctrl,BSP_IO_PORT_03_PIN_01,((uint32_t) IOPORT_CFG_PORT_DIRECTION_INPUT));//等待DATA响应低电平,后变为高电平do{delay_dht--;if (!delay_dht)return 0;R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);}while(state==BSP_IO_LEVEL_HIGH);do{delay_dht--;if (!delay_dht)return 0;R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);}while(state==BSP_IO_LEVEL_LOW);do{delay_dht--;if (!delay_dht)return 0;R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, &state);}while(state==BSP_IO_LEVEL_HIGH);humdity_integer = DHT11_ReadByte();humdity_decimal = DHT11_ReadByte();temp_integer = DHT11_ReadByte();temp_decimal = DHT11_ReadByte();dht11_check = DHT11_ReadByte();if (((humdity_integer+humdity_decimal+temp_integer+temp_decimal)&0xff)==dht11_check)return 1;elsereturn 0;
}dht11.h
/** DHT11.h** Created on: 2023年6月29日* Author: a8456*/#ifndef DHT11_H_
#define DHT11_H_#include "hal_data.h"uint8_t DHT11_ReadByte(void);
uint8_t DHT11_Read(void);#endif /* DHT11_H_ */主程序
#include "hal_data.h"
#include <stdio.h>
#include "smg.h"
#include "timer_smg.h"
#include "flash_smg.h"
#include "dht11.h"
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER//温湿度变量定义
uint8_t humdity_integer;//湿度整数
uint8_t humdity_decimal;//湿度小数
uint8_t temp_integer ;//温度整数
uint8_t temp_decimal ;//温度小数
uint8_t dht11_check ;//校验值//数码管变量
uint8_t num1=1,num2=4,num3=6,num4=8;//4个数码管显示的数值
uint8_t num_flag=0;//4个数码管和冒号轮流显示,一轮刷新五次//RTC变量
/* rtc_time_t is an alias for the C Standard time.h struct 'tm' */
rtc_time_t set_time =
{.tm_sec = 50, /* 秒,范围从 0 到 59 */.tm_min = 59, /* 分,范围从 0 到 59 */.tm_hour = 23, /* 小时,范围从 0 到 23*/.tm_mday = 29, /* 一月中的第几天,范围从 0 到 30*/.tm_mon = 11, /* 月份,范围从 0 到 11*/.tm_year = 123, /* 自 1900 起的年数,2023为123*/.tm_wday = 6, /* 一周中的第几天,范围从 0 到 6*/
// .tm_yday=0, /* 一年中的第几天,范围从 0 到 365*/
// .tm_isdst=0; /* 夏令时*/
};//RTC闹钟变量
rtc_alarm_time_t set_alarm_time=
{.time.tm_sec = 58, /* 秒,范围从 0 到 59 */.time.tm_min = 59, /* 分,范围从 0 到 59 */.time.tm_hour = 23, /* 小时,范围从 0 到 23*/.time.tm_mday = 29, /* 一月中的第几天,范围从 1 到 31*/.time.tm_mon = 11, /* 月份,范围从 0 到 11*/.time.tm_year = 123, /* 自 1900 起的年数,2023为123*/.time.tm_wday = 6, /* 一周中的第几天,范围从 0 到 6*/.sec_match = 1,//每次秒到达设置的进行报警.min_match = 0,.hour_match = 0,.mday_match = 0,.mon_match = 0,.year_match = 0,.dayofweek_match = 0,};bsp_io_level_t sw1;//按键SW1状态
bsp_io_level_t sw2;//按键SW2状态
bsp_io_level_t sw3;//按键SW3状态
bsp_io_level_t sw4;//按键SW4状态
bsp_io_level_t qe_sw;//触摸电容状态int sw1_num1=0;//按键SW1计数值,去抖和长按短按判断
int sw2_num1=0;//按键SW2计数值,去抖和长按短按判断
int sw3_num1=0;//按键SW3计数值,去抖和长按短按判断
int sw4_num1=0;//按键SW4计数值,去抖和长按短按判断
int qe_sw_num1=0;//触摸按键计数值,去抖和长按短按判断
void qe_touch_sw(void);//数码管显示状态,0正常显示,1修改小时,2修改分钟,3保存修改数据,4温度,5湿度
int smg_mode=0;
int sec=0,min=0,hour=0;//保存时间数据
uint16_t time_mode_num=0;//定时器刷新时间,实现闪烁效果volatile uint8_t g_src_uint8[4]={0x00,0x00,0x00,0x00};//时间保存在该数组里面
volatile uint8_t g_src_uint8_length=4;
uint8_t flash_flag=0;//保存时间数据,一半在每过一分钟或者按键修改时间//RTC回调函数
volatile bool rtc_flag = 0;//RTC延时1s标志位
volatile bool rtc_alarm_flag = 0;//RTC闹钟
/* Callback function */
void rtc_callback(rtc_callback_args_t *p_args)
{/* TODO: add your own code here */if(p_args->event == RTC_EVENT_PERIODIC_IRQ)rtc_flag=1;else if(p_args->event == RTC_EVENT_ALARM_IRQ)rtc_alarm_flag=1;
}fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{if(p_args->event == UART_EVENT_TX_COMPLETE){uart_send_complete_flag = true;}
}#ifdef __GNUC__ //串口重定向#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endifPUTCHAR_PROTOTYPE
{err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);if(FSP_SUCCESS != err) __BKPT();while(uart_send_complete_flag == false){}uart_send_complete_flag = false;return ch;
}int _write(int fd,char *pBuffer,int size)
{for(int i=0;i<size;i++){__io_putchar(*pBuffer++);}return size;
}/*******************************************************************************************************************//*** main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function* is called by main() when no RTOS is used.**********************************************************************************************************************/
void hal_entry(void)
{/* TODO: add your own code here *//**********************DHT11初始化***************************************/R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_03_PIN_01, BSP_IO_LEVEL_HIGH);R_BSP_SoftwareDelay(1000U, BSP_DELAY_UNITS_MILLISECONDS);/* Open the transfer instance with initial configuration. */err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);assert(FSP_SUCCESS == err);
/**********************数码管测试***************************************/
// ceshi_smg();
/**********************定时器开启***************************************//* Initializes the module. */err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);/* Handle any errors. This function should be defined by the user. */assert(FSP_SUCCESS == err);/* Start the timer. */(void) R_GPT_Start(&g_timer0_ctrl);/**********************data flash***************************************/flash_result_t blank_check_result;/* Open the flash lp instance. */err = R_FLASH_LP_Open(&g_flash0_ctrl, &g_flash0_cfg);assert(FSP_SUCCESS == err);// WriteFlashTest(4,g_src_uint8 ,FLASH_DF_BLOCK_0);PrintFlashTest(FLASH_DF_BLOCK_0);set_time.tm_sec=0;//时间数据 秒set_time.tm_min=min;//时间数据 分钟hour=set_time.tm_hour=hour;//时间数据 小时/**********************RTC开启***************************************//* Initialize the RTC module*/err = R_RTC_Open(&g_rtc0_ctrl, &g_rtc0_cfg);/* Handle any errors. This function should be defined by the user. */assert(FSP_SUCCESS == err);/* Set the RTC clock source. Can be skipped if "Set Source Clock in Open" property is enabled. */R_RTC_ClockSourceSet(&g_rtc0_ctrl);/* R_RTC_CalendarTimeSet must be called at least once to start the RTC */R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);/* Set the periodic interrupt rate to 1 second */R_RTC_PeriodicIrqRateSet(&g_rtc0_ctrl, RTC_PERIODIC_IRQ_SELECT_1_SECOND);R_RTC_CalendarAlarmSet(&g_rtc0_ctrl, &set_alarm_time);uint8_t rtc_second= 0; //秒uint8_t rtc_minute =0; //分uint8_t rtc_hour =0; //时uint8_t rtc_day =0; //日uint8_t rtc_month =0; //月uint16_t rtc_year =0; //年uint8_t rtc_week =0; //周rtc_time_t get_time;sec=set_time.tm_sec;//时间数据 秒min=set_time.tm_min;//时间数据 分钟hour=set_time.tm_hour;//时间数据 小时while(1){if(flash_flag)//按键修改完毕数据后进行保存{g_src_uint8[0]=hour;g_src_uint8[1]=min;WriteFlashTest(4,g_src_uint8 ,FLASH_DF_BLOCK_0);flash_flag=0;}if(rtc_flag){R_RTC_CalendarTimeGet(&g_rtc0_ctrl, &get_time);//获取RTC计数时间rtc_flag=0;rtc_second=get_time.tm_sec;//秒rtc_minute=get_time.tm_min;//分rtc_hour=get_time.tm_hour;//时rtc_day=get_time.tm_mday;//日rtc_month=get_time.tm_mon;//月rtc_year=get_time.tm_year; //年rtc_week=get_time.tm_wday;//周printf(" %d y %d m %d d %d h %d m %d s %d w\n",rtc_year+1900,rtc_month,rtc_day,rtc_hour,rtc_minute,rtc_second,rtc_week);//时间显示num1=rtc_hour/10;num2=rtc_hour%10;num3=rtc_minute/10;num4=rtc_minute%10;if(rtc_second==0&&smg_mode==0)//这个时候刷新变量{sec=rtc_second;//时间数据 秒min=rtc_minute;//时间数据 分钟hour=rtc_hour;//时间数据 小时g_src_uint8[0]=hour;g_src_uint8[1]=min;WriteFlashTest(4,g_src_uint8 ,FLASH_DF_BLOCK_0);}if(rtc_second%5==0)//5S读一次{DHT11_Read();printf("hum=%d temp=%d\n",humdity_integer,temp_integer);}}if(rtc_alarm_flag){rtc_alarm_flag=0;printf("/************************Alarm Clock********************************/\n");}set_smg_button();R_BSP_SoftwareDelay(10U, BSP_DELAY_UNITS_MILLISECONDS);}#if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();
#endif
}
这篇关于电子时钟制作(瑞萨RA)(9)----读取DHT11温湿度数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




