本文主要是介绍[单片机框架][bsp层][esp32s3][bsp_pwm] PWM的使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
LED PWM 控制器
概述
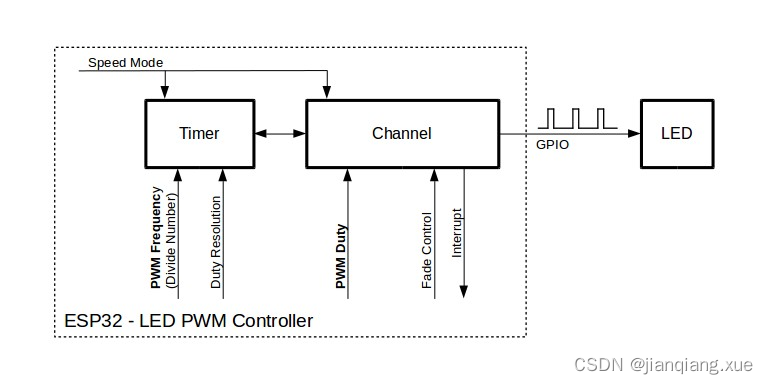
LED 控制器 (LEDC) 主要用于控制 LED,也可产生 PWM 信号用于其他设备的控制。 该控制器有 8 路通道,可以产生独立的波形来驱动 RGB LED 等设备。
LED PWM 控制器可在无需 CPU 干预的情况下自动改变占空比,实现亮度和颜色渐变。
功能概览
设置 LEDC 通道分三步完成。注意,与 ESP32 不同,ESP32-S3 仅支持设置通道为低速模式。
定时器配置 指定 PWM 信号的频率和占空比分辨率。
通道配置 绑定定时器和输出 PWM 信号的 GPIO。
改变 PWM 信号 输出 PWM 信号来驱动 LED。可通过软件控制或使用硬件渐变功能来改变 LED 的亮度。
另一个可选步骤是可以在渐变终端设置一个中断。
定时器配置
要设置定时器,可调用函数 ledc_timer_config(),并将包括如下配置参数的数据结构 ledc_timer_config_t 传递给该函数:
速度模式(值必须为 LEDC_LOW_SPEED_MODE)
定时器索引 ledc_timer_t
PWM 信号频率
PWM 占空比分辨率
时钟源 ledc_clk_cfg_t
频率和占空比分辨率相互关联。PWM 频率越高,占空比分辨率越低,反之亦然。如果 API 不是用来改变 LED 亮度,而是用于其它目的,这种相互关系可能会很重要。更多信息详见 频率和占空比分辨率支持范围 一节。
时钟源同样可以限制PWM频率。选择的时钟源频率越高,可以配置的PWM频率上限就越高。
频率和占空比分辨率支持范围
LED PWM 控制器主要用于驱动 LED。该控制器 PWM 占空比设置的分辨率范围较广。比如,PWM 频率为 5 kHz 时,占空比分辨率最大可为 13 位。这意味着占空比可为 0 至 100% 之间的任意值,分辨率为 ~0.012%(2 ** 13 = 8192 LED 亮度的离散电平)。然而,这些参数取决于为 LED PWM 控制器定时器计时的时钟信号,LED PWM 控制器为通道提供时钟(具体可参考 定时器配置 和 ESP32-S3 技术参考手册 > LED PWM 计时器 (LEDC) [PDF])。
LED PWM 控制器可用于生成频率较高的信号,足以为数码相机模组等其他设备提供时钟。此时,最大频率可为 40 MHz,占空比分辨率为 1 位。也就是说,占空比固定为 50%,无法调整。
LED PWM 控制器 API 会在设定的频率和占空比分辨率超过 LED PWM 控制器硬件范围时报错。例如,试图将频率设置为 20 MHz、占空比分辨率设置为 3 位时,串行端口监视器上会报告如下错误:
E (196) ledc: requested frequency and duty resolution cannot be achieved, try reducing freq_hz or duty_resolution. div_param=128
此时,占空比分辨率或频率必须降低。比如,将占空比分辨率设置为 2 会解决这一问题,让占空比设置为 25% 的倍数,即 25%、50% 或 75%
参考:https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32s3/api-reference/peripherals/ledc.html
/********************************************************************************* @file pwm.cpp* @author jianqiang.xue* @version V1.0.0* @date 2022-04-24* @brief ********************************************************************************/
#include "pwm.h"
#include <driver/ledc.h>
#include "esp_log.h"static const char TAG[] = "pwm";
static const unsigned short PWM_DUTY = 8192; // (2 ^ duty_resolution) - 1static uint32_t _tim_freq[LEDC_TIMER_MAX] = {0};void PWM::init(uint32_t freq) {esp_err_t ret;int8_t timer_id = -1;for (uint8_t i = 0; i < LEDC_TIMER_MAX; i++){if (_tim_freq[i] == freq){timer_id = i;break;}else if (_tim_freq[i] == 0){timer_id = i;}}if (timer_id == -1){ESP_LOGE(TAG, "init fail! timer num > max");return;}ledc_timer_config_t ledc_timer;ledc_timer.duty_resolution = LEDC_TIMER_13_BIT; // resolution of PWM duty (2 ^ duty_resolution) - 1ledc_timer.freq_hz = freq;ledc_timer.speed_mode = LEDC_LOW_SPEED_MODE;ledc_timer.timer_num = (ledc_timer_t)(timer_id % LEDC_TIMER_MAX);// Set configuration of timer0 for high speed channelsret = ledc_timer_config(&ledc_timer);if (ret != ESP_OK){ESP_LOGE(TAG, "timer cfg fail! freq:%d, err:0x%x", freq, ret);return;}_tim_freq[timer_id] = freq;ledc_channel_config_t ledc_channel = {0};ledc_channel.gpio_num = PWM::_pin;ledc_channel.channel = (ledc_channel_t)PWM::_channel;ledc_channel.speed_mode = LEDC_LOW_SPEED_MODE;ledc_channel.timer_sel = (ledc_timer_t)(timer_id % LEDC_TIMER_MAX);ledc_channel.duty = 0;ledc_channel.intr_type = LEDC_INTR_FADE_END;ledc_channel.flags.output_invert = 0;// Set LED Controller with previously prepared configurationret = ledc_channel_config(&ledc_channel);if (ret != ESP_OK){ESP_LOGE(TAG, "ch cfg fail! ch:%d, err:0x%x", PWM::_channel, ret);return;}ledc_fade_func_install(0);
}void PWM::set_duty_cycle(float dc)
{ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE, (ledc_channel_t)PWM::_channel, (uint32_t)(PWM_DUTY * dc), 0xFFFF);
}float PWM::get_duty_cycle()
{return (float)(ledc_get_duty(LEDC_LOW_SPEED_MODE, (ledc_channel_t)PWM::_channel)) / PWM_DUTY;
}#pragma once
#include <stdint.h>class PWM {
public:PWM(uint8_t channel, uint8_t pin):_channel(channel),_pin(pin) {}void init(uint32_t freq);void set_duty_cycle(float dc);float get_duty_cycle();
private:uint8_t _channel;uint8_t _pin;
};这篇关于[单片机框架][bsp层][esp32s3][bsp_pwm] PWM的使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




