本文主要是介绍arduino nano 蓝牙_Arduino心跳观察器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
 作者: sharathnaik / 翻译:爱上Arduino我们都感到或听到了我们的心脏跳动,但大部分人没有亲眼见过。这就是我个项目的初衷:一方面用心率检测传感器让人简单直观的看见心脏的跳动,另一方面可以学会一些基本的电路和机械原理。
作者: sharathnaik / 翻译:爱上Arduino我们都感到或听到了我们的心脏跳动,但大部分人没有亲眼见过。这就是我个项目的初衷:一方面用心率检测传感器让人简单直观的看见心脏的跳动,另一方面可以学会一些基本的电路和机械原理。 
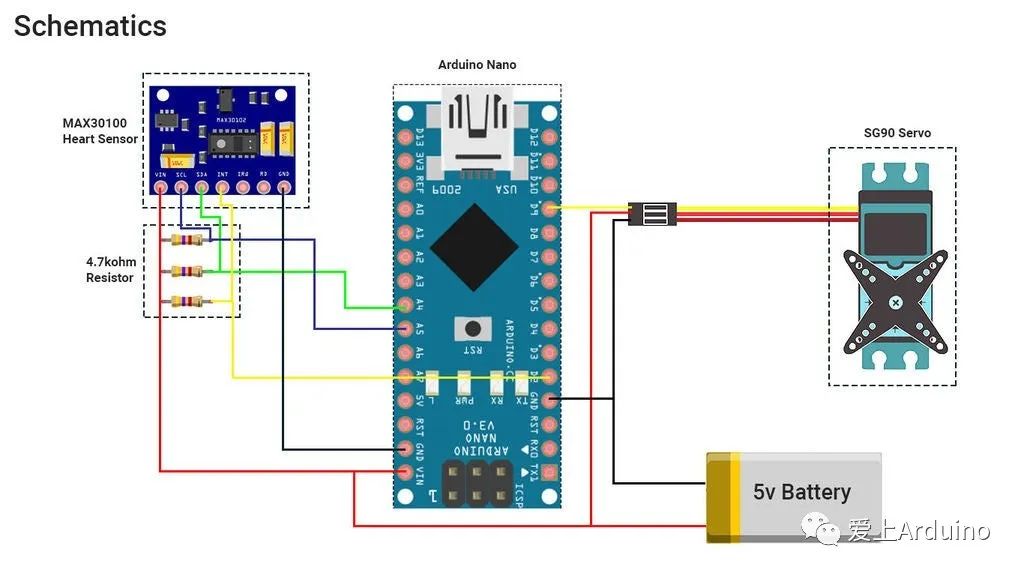
Arduino Nano
9克舵机
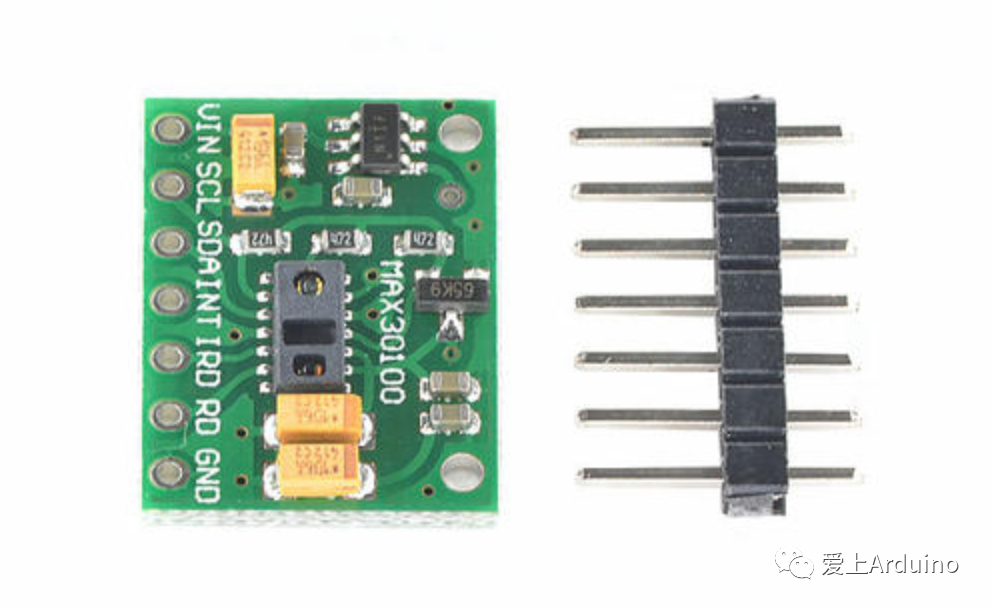
MAX30100血氧和心率传感器模块
4.7K欧电阻 (x3)
MicroUSB数据线
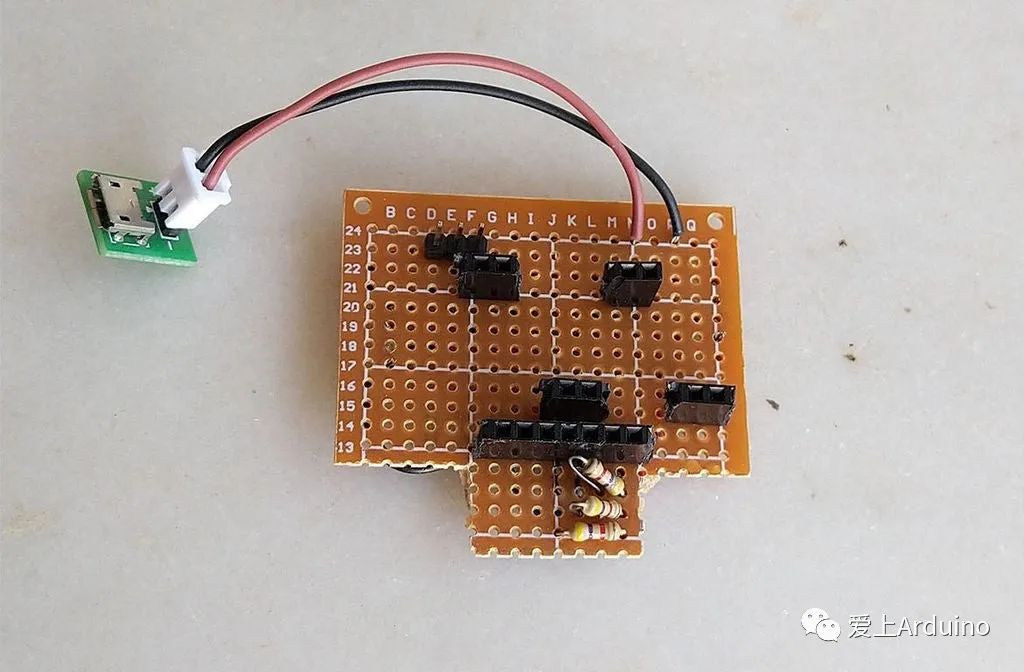
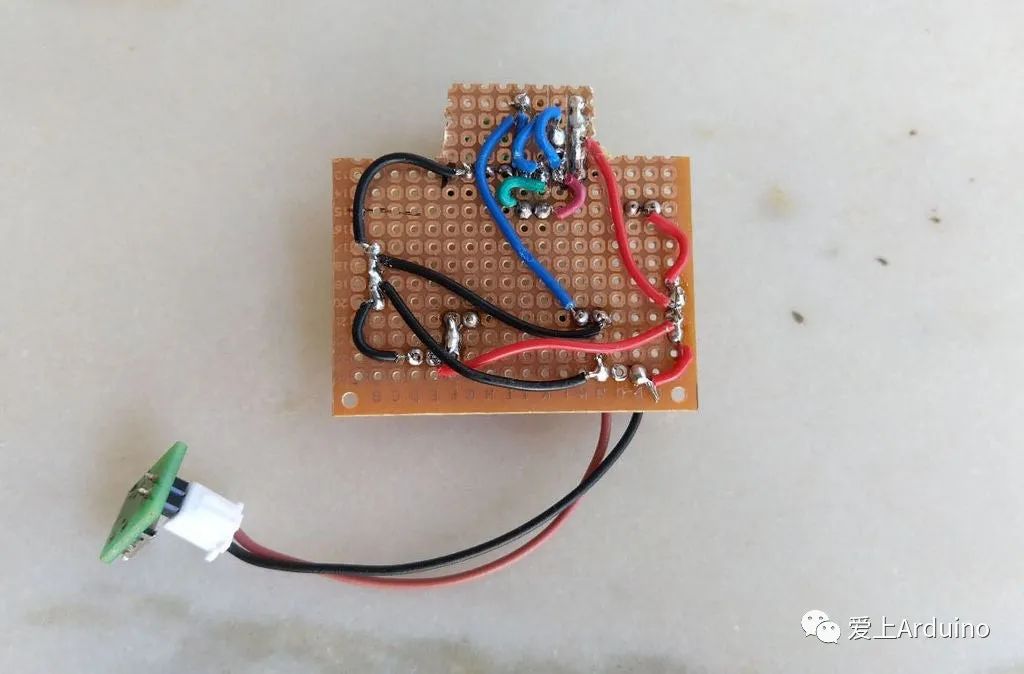
洞洞板
若干公母排线头
M3x10螺丝(x40)
M3x25螺丝(x4)
M3螺帽(x50)
亚克力板
隔离柱40mm(x2)
隔离柱25mm(x4)
直径2mmm16.5cm长铜柱
焊铁
3D打印机

https://www.thingiverse.com/thing:4266297/ziphttps://content.instructables.com/ORIG/FS7/EUY4/K8OO3PSQ/FS7EUY4K8OO3PSQ.pdfhttps://content.instructables.com/ORIG/FSB/ZLWS/K8OO3PSR/FSBZLWSK8OO3PSR.dxfhttps://content.instructables.com/ORIG/FP8/H3J3/K8OO3PSS/FP8H3J3K8OO3PSS.dxf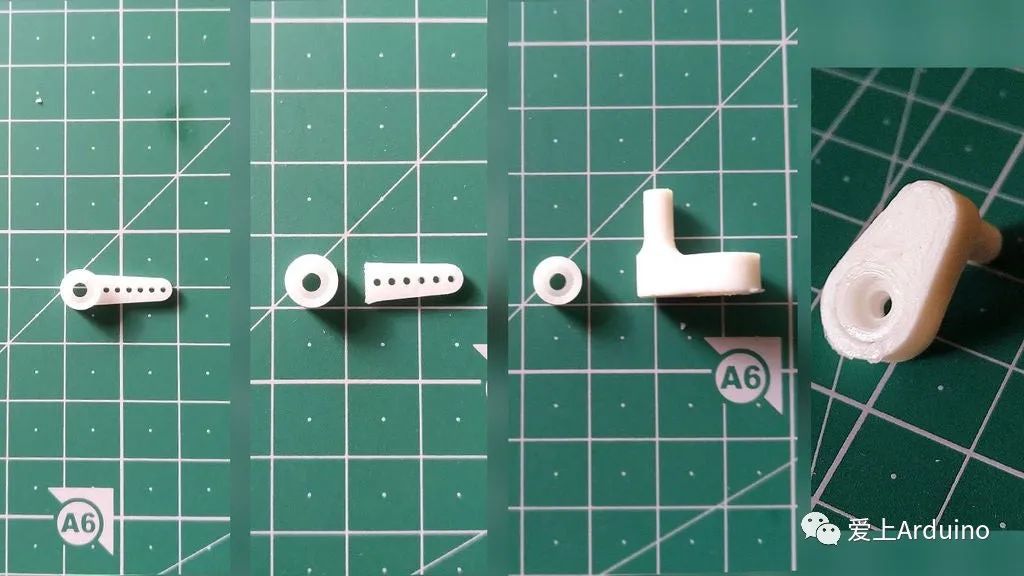
https://github.com/oxullo/Arduino-MAX30100/archive/master.zip#include #include "MAX30100_PulseOximeter.h"#include #include #define REPORTING_PERIOD_MS 1000PulseOximeter pox;const int SERVO1_PIN = 9;uint32_t tsLastReport = 0;Servo Servo1;void onBeatDetected(){Serial.println("Beat!"); if (Servo1.read()== 10) { Servo1.write(170); } else { Servo1.write(10); }}void setup(){ Serial.begin(115200); Serial.print("Initializing pulse oximeter.."); if (!pox.begin()) { Serial.println("FAILED"); for(;;); } else { Serial.println("SUCCESS"); } pox.setIRLedCurrent(MAX30100_LED_CURR_7_6MA); pox.setOnBeatDetectedCallback(onBeatDetected); /************************************************** * Set servos to start position. * This is the position where the movement starts. *************************************************/ Servo1.write(100); Serial.print("servo done");}void loop(){ // Make sure to call update as fast as possible pox.update();}
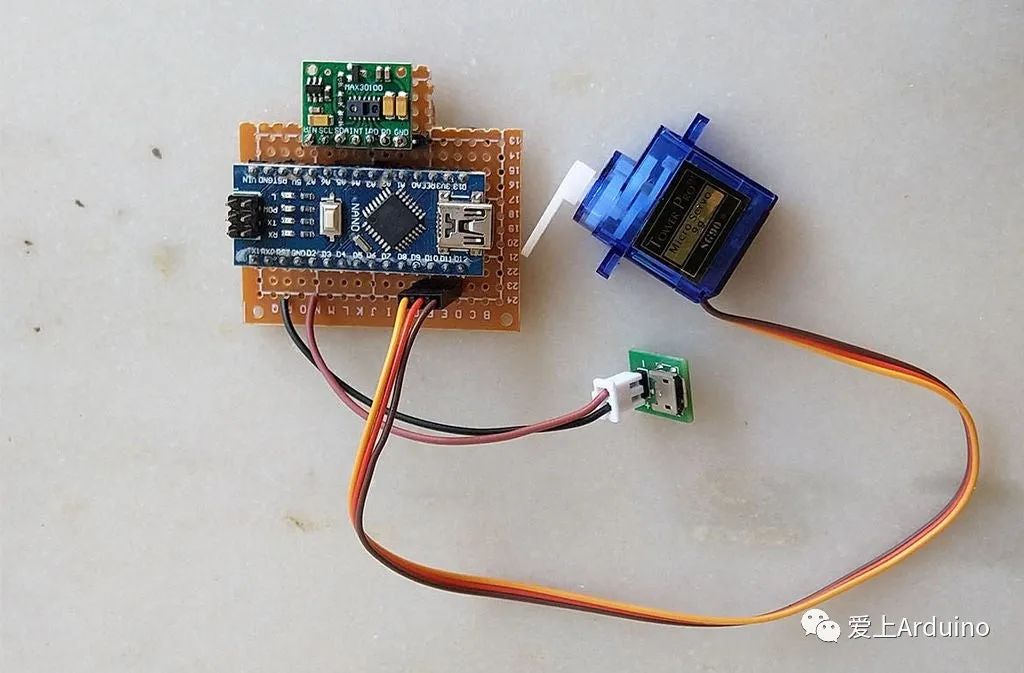
上传成功后,打开串口监视器,放上手指。你应该会看到输出Beat同时,舵机会根据心跳频率来回运动。 步骤7: 完成组装现在所有的部件都准备好了,我们就可以开始组装它们了。由于这部分比较长,我制作了一个视频来说明。组装过程可能有点让人抓狂,需要一些耐心。因为大部分零件都需要在很小的空间里完成拼接,但当你完成了,你会很有成就感的!这个观察器我是用充电宝来供电的,但理论上任何5V的电源都可以。小贴示:你可以在关节连接处抹一些齿轮润滑油来润滑和减少噪音。螺帽不要拧地过紧,保证连接处可以自由运动。 步骤8: 玩得开心(结语)至此Arduino心跳观察器就完成来,你可以让你的同学,家人都来试玩一下!只要把手指放在传感器上,观察器就同步显示你的心跳频率。可以比一比你们谁的心跳最快,谁的心跳最慢。你也可以对比刚运动完或者刚休息完时候的心跳。 如果你想自己改进或者有任何的问题。欢迎到我的页面留言提问:
如果你想自己改进或者有任何的问题。欢迎到我的页面留言提问: https://sharathnaik.com/heartvisualizer
Arduino电子书和视频教程获取方式
也想要一份我们套件附送的Arduino电子书和各种视频教程么?
扫描下方二维码加关注后,回复“福利”
这篇关于arduino nano 蓝牙_Arduino心跳观察器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







