本文主要是介绍[物联网实操]改造家里原有电灯控制插座,继电器变身双联开关,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本篇文章主要讲述双联开关原理,以及通过继电器实现控制LED灯双联效果。
具体怎么做呢?
我们先讲解下双联开关接线实操。上图

双联开关正面
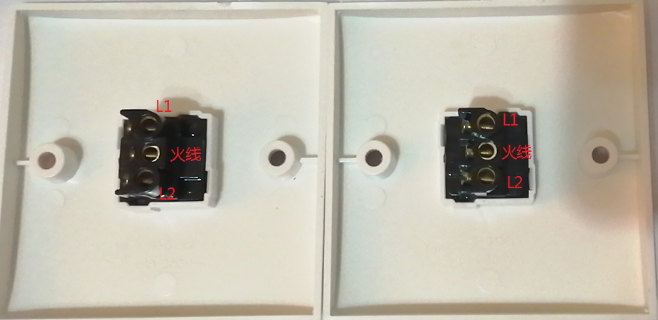
双联开关背面
用电线把L1,L2对接起来,左边中间孔位接火线出,右边中间孔位接火线入。如图
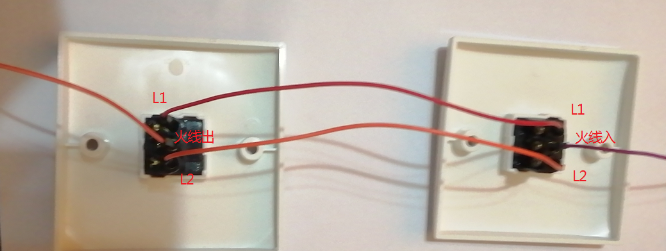 双联开关接线图
双联开关接线图
火线入接电源火线,火线出接负载(电灯火线),负载零线(电灯零线)接电源零线。
以上接线方法参考了文章,大家有空也可以去看看
接线完成后我们看下效果~
看到已经能实现双联控制。那么现在问题来了,线下的双联怎么结合继电器实现线上线下控制切换呢?
接下来,我们将上图的其中一个双联开关换成我们的一路继电器。看图
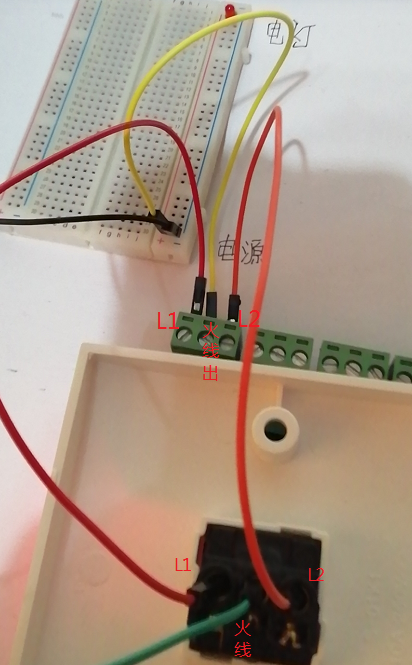
继电器+双联开关接线图
可以看出,继电器+双联开关的接法是一致的。
双联开关示例
单个双联开关+485继电器实现双双联演示
一切准备就绪后,我们通过云端控制下继电器打开电灯,然后使用双联开关关闭电灯,一切OK,一个智能家居电灯的改造思路就实现了。
好了,这期先到这里,感兴趣的同学请持续关注。
这篇关于[物联网实操]改造家里原有电灯控制插座,继电器变身双联开关的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






