本文主要是介绍Macronix MX25L25645G NOR Flash无法擦除问题分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 问题现象描述
处理器使用的 SAM9X60, 使用的内核版本是 5.10.80,在调试 Macronix MX25L25645G NOR Flash时,发现flash驱动加载成功后,使用 mtd_debug 工具 erase flash时,擦除一整片flash区域时,命令执行速度很快,而且命令执行完没有报错,但是最后发现flash并没有真正被擦除。
- mtd_debug 擦写命令
mtd_debug erase /dev/mtd0 0 0x20000mtd_debug write /dev/mtd0 0 0x20000 sample.binmtd_debug read /dev/mtd0 0 0x20000 bootstrap_2.bin
- 也可以使用 flashcp 和 flash_erase 命令, flashcp 会先擦除 flash 然后再写入数据。
root@sam9x60ek:/tmp# flashcp -v sample.bin /dev/mtd3
Erasing blocks: 1/1 (100%)
Writing data: 1k/0k (100%)
Verifying data: 1k/0k (1%)File does not seem to match flash data. First mismatch at 0x00000000-0x00000400
2. 代码走读分析
2.1 探索 SPI erase 过程
用户层的mtd_debug erase , flash_ease等命令到内核驱动层进行分析。
查看 flashcp 的源代码,其采用的方式是通过 ioctl (dev_fd,MEMERASE,&erase) 方式来进行擦除操作;
查看 flash_erase的源代码,其调用了libc库中的 mtd_erase API 进行擦除操作, mtd_erase API 最终会调用 ioctl (dev_fd,MEMERASE,&erase) 方式来进行擦除操作。
两者本质是一样的。
基于5.10.80 内核版本
1)ioctl (dev_fd,MEMERASE,&erase)
Path: /linux/drivers/mtd/mtdchar.c
static int mtdchar_ioctl(struct file *file, u_int cmd, u_long arg) 函数中
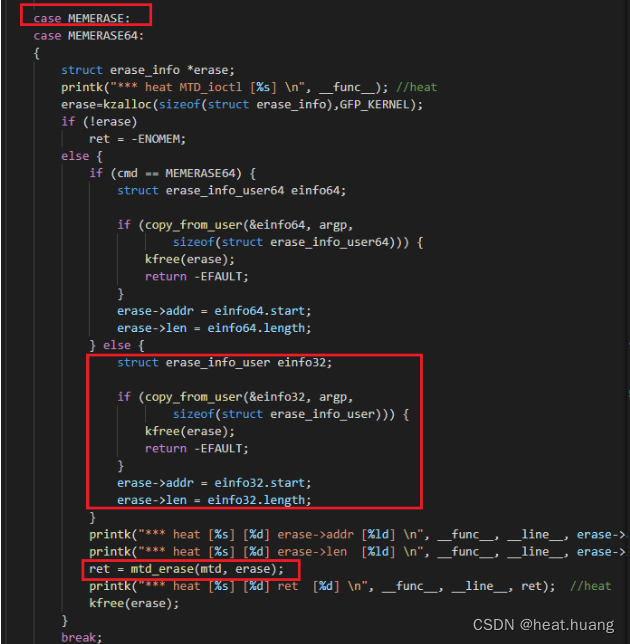
MEMERASE64 这个宏是为了操作 大于 4Gib大小的flash才会使用的。我们这里不考虑。
走到了内核中 mtd_erase
/linux/drivers/mtd/mtdcore.c
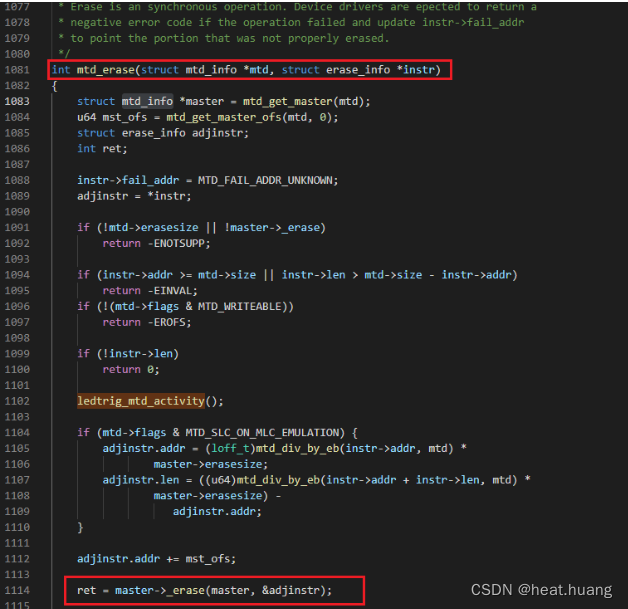
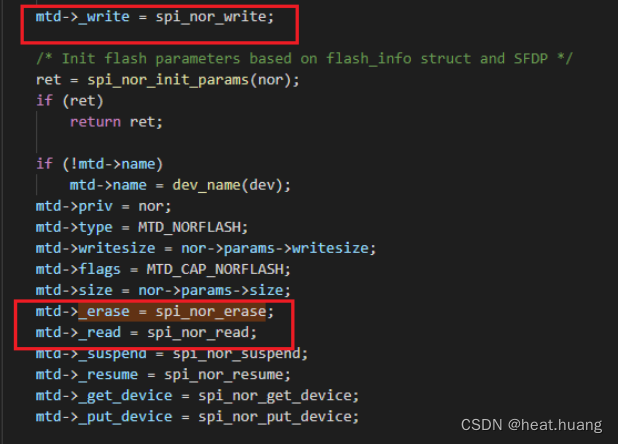
会调用 master->_erase(master, &adjinstr) 这个操作。这个函数的定义在
/linux/drivers/mtd/spi-nor/core.c
spi_nor_scan 中
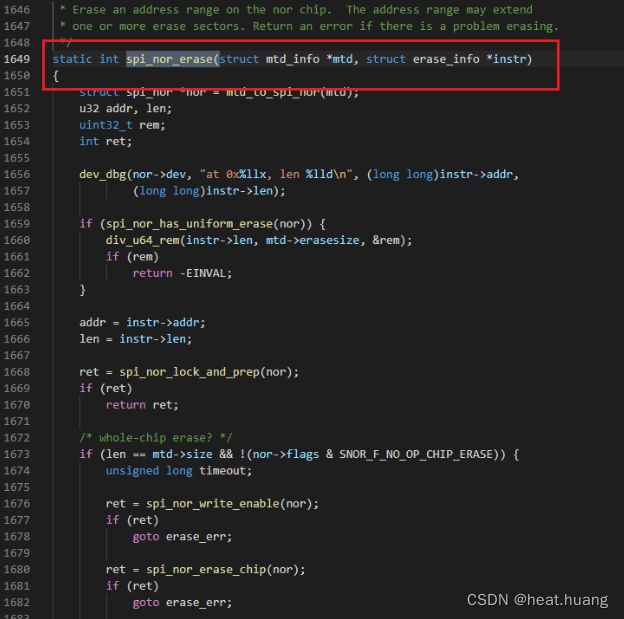
对比SAM9X60 EK Demo板,发现走的是 spi_nor_has_uniform_erase 这个else 分支
使用的是 spi_nor_erase_sector 按扇区来擦除
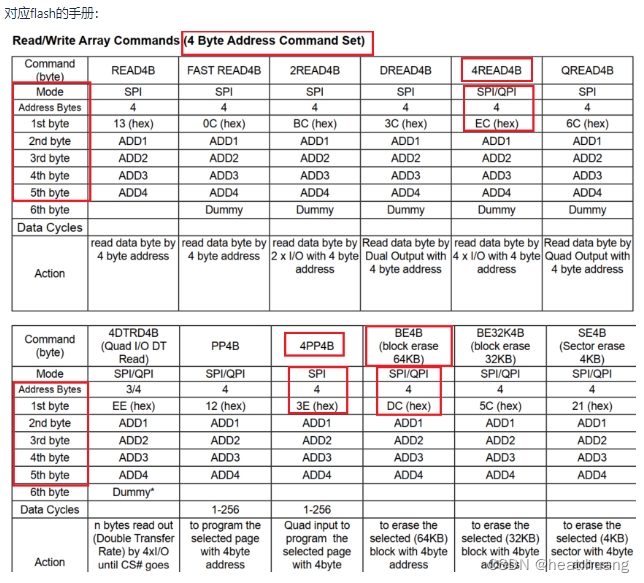
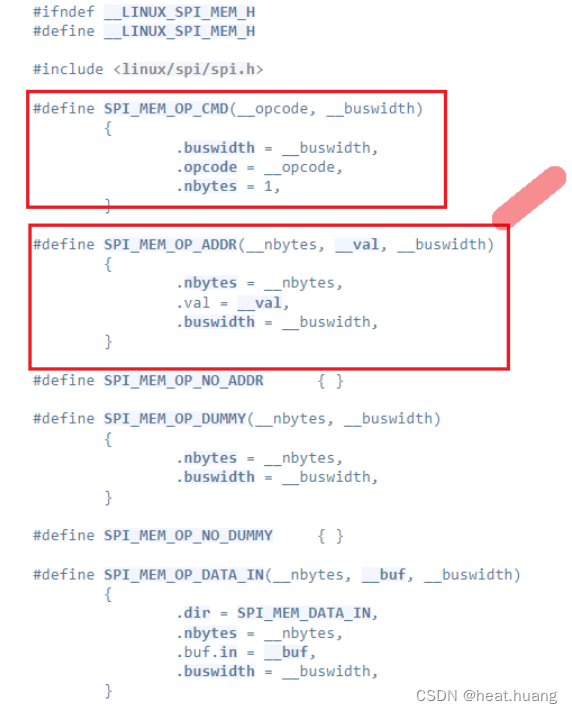
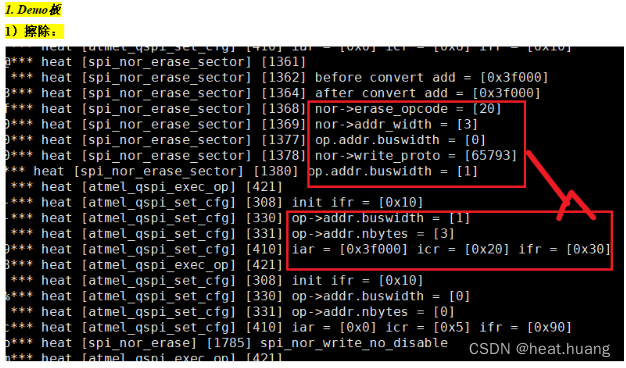
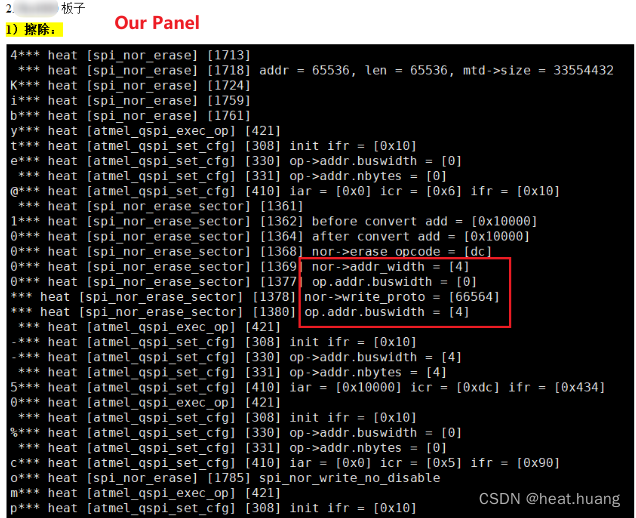
在驱动中添加了打印信息,对于 MX25L25645G 这个NOR来说,驱动选用的擦除、写、读命令以及对应的地址分别是:

2.2. SPI 擦除失败的根本原因分析。
/linux/drivers/mtd/spi-nor/core.c
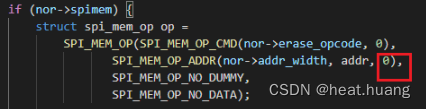
spi_nor_erase_sector
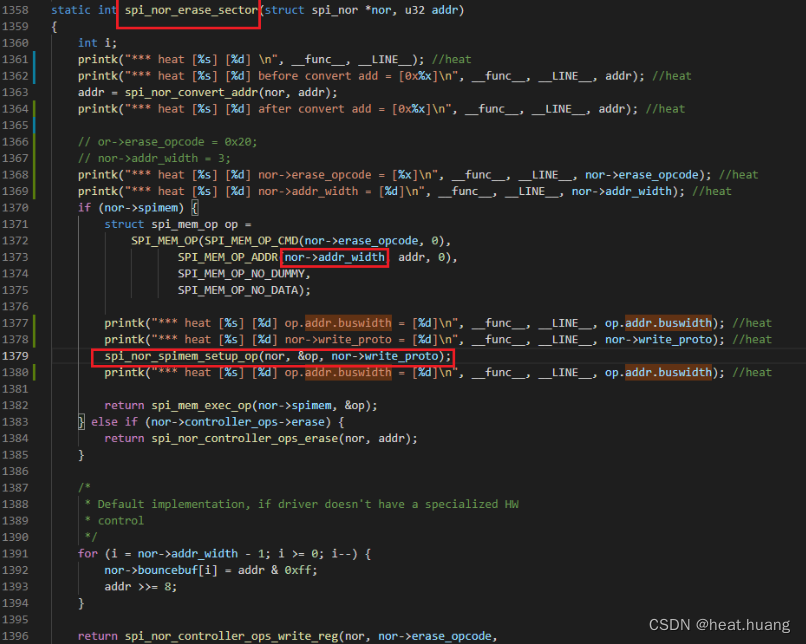
传入的 nor->addr_width = [4] ,擦除操作时,根据flash数据手册,op→addr.buswidth应该等于1,但是等于4了,导致数据帧组装错误,flash没有识别这个指令,从而没有擦除成功。
对代码进行了修改,代码中提交的修改记录:
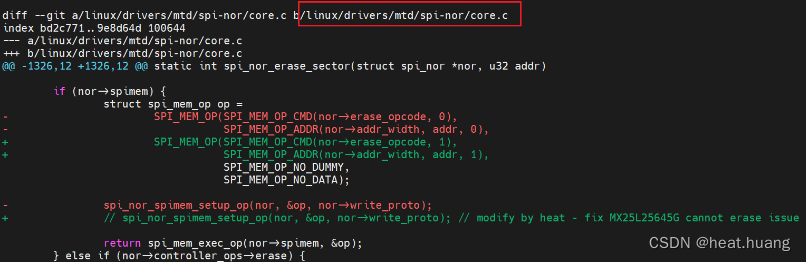
详细分析下上面的代码:
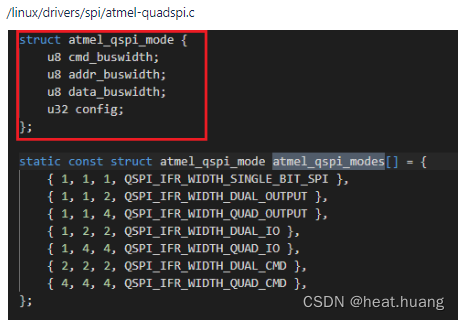
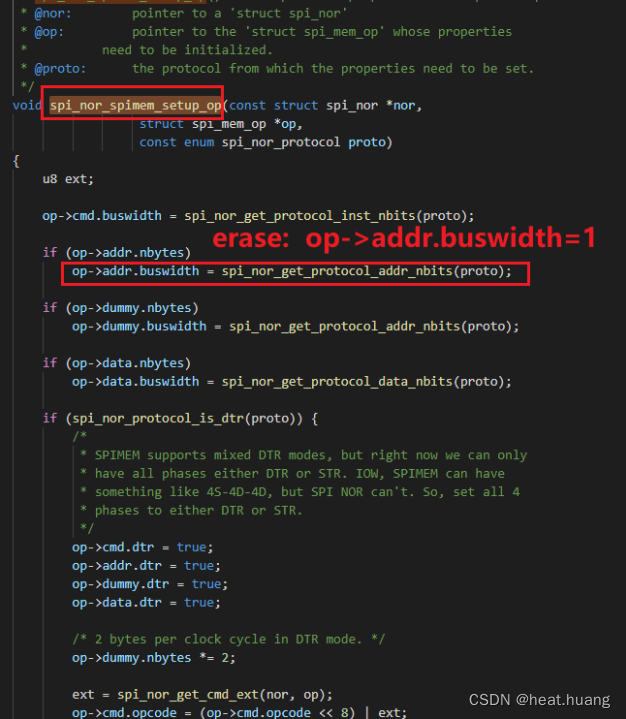
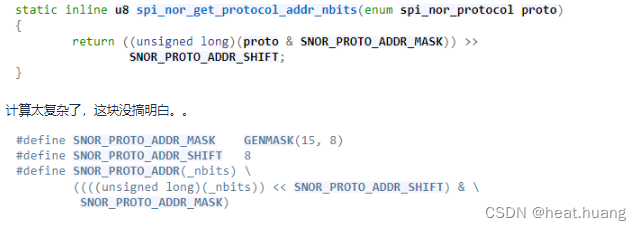
op->addr.buswidth 是怎么来的呢?
我们这里设置的为0,但是下面这个函数也会对 buswidth 进行赋值。
spi_nor_spimem_setup_op(nor, &op, nor->write_proto);
加打印,看一下传入的 nor->write_proto 参数是多少,以及这个参数是在哪里初始化的?op.addr.buswidth 在 进入spi_nor_spimem_setup_op这个函数前后的值是多少?

nor→write_proto
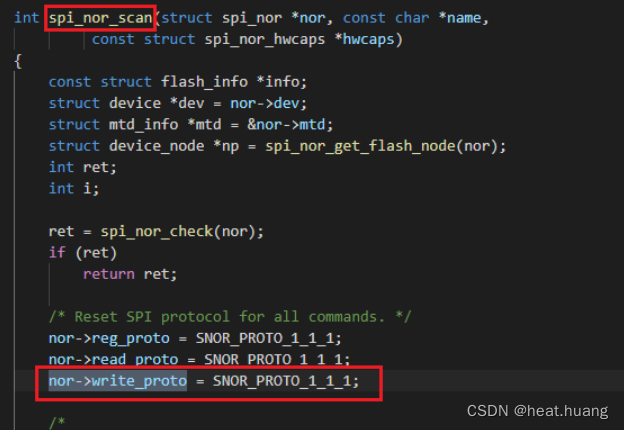
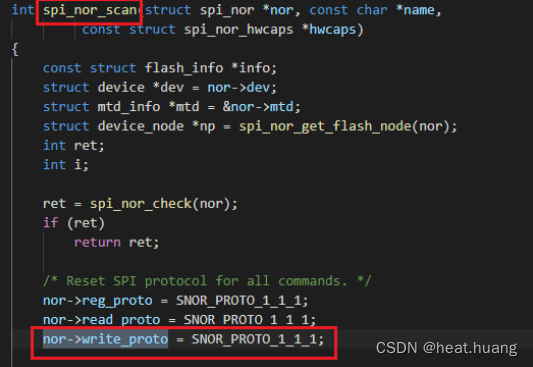
spi_nor_scan
-> spi_nor_init_params
-> spi_nor_info_init_params
-> spi_nor_default_setup
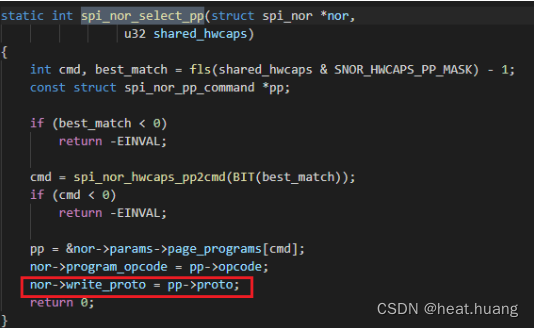
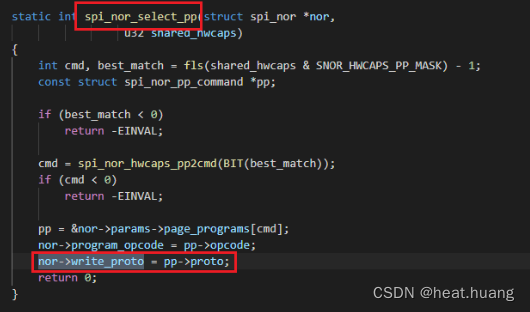
-> spi_nor_select_pp
感觉初始化并不是这样定义的。
在调试过程中,使用了Microchip SAM9X60 EK 评估板作为对比。评估板使用的QSPI NOR Flash型号是 SST26VF064B.

++++++++++++ 擦除操作,将P4K和Demo版本进行对比传入的 nor->write_proto ++++++++++++++
整个流程:
发送写使能(指令 06) -》 发送擦除命令 (指令 dc, (4 Byte Address Command, BE4B (block erase 64KB) )
-》读取状态寄存器(指令05,WIP标志反映命令是否执行成功)-》关闭写使能(指令04)
nor->write_proto 被定义的地方如下:
/linux/drivers/mtd/spi-nor/core.c
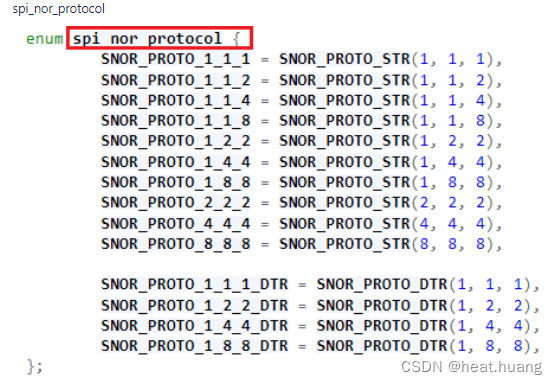
最先开始初始时,spi_nor_scan 中定义的是 SNOR_PROTO_1_1_1
在这个地方被重新赋值:
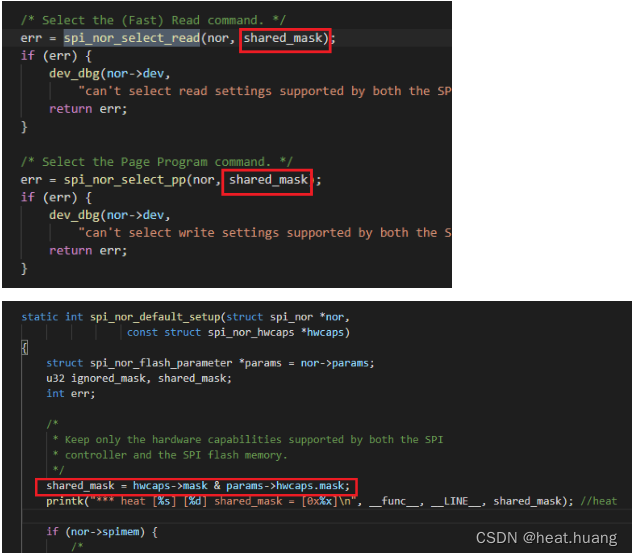
spi_nor_select_pp
对比spi_nor_select_read 和 spi_nor_select_pp。
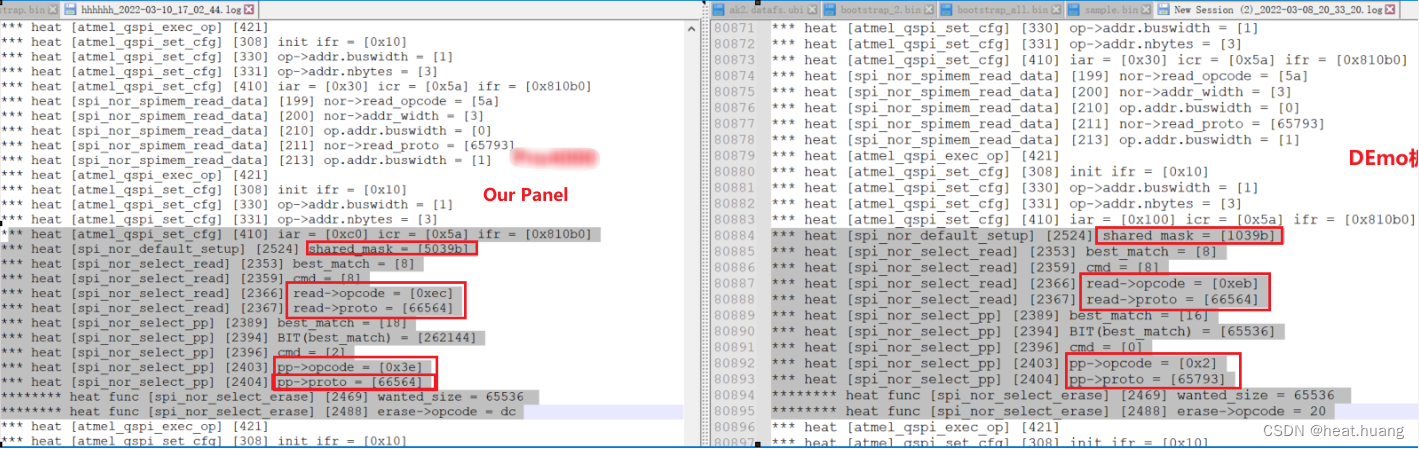
可以看到由于 shared_mask 不同造成后后面 best_match 选择不一样,Demo板选择的PP 模式是 1-1-1,我们的板子选择的PP 模式是 1-4-4
shared_mask
我们的板子: 0x5039b (0101 0000 0011 1001 1011)
Demo板: 0x1039b (0001 0000 0011 1001 1011)
这个对照下面:
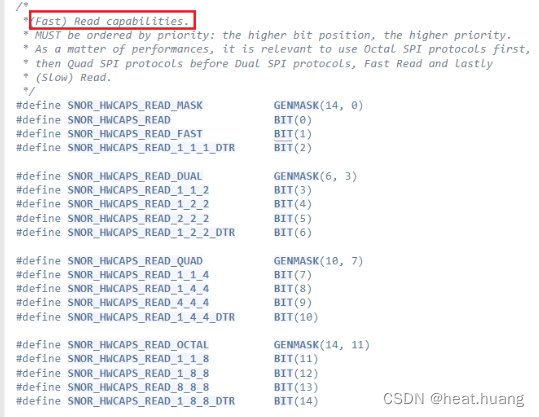
https://elixir.bootlin.com/linux/v5.10.80/source/include/linux/mtd/spi-nor.h#L220
flash的读能力
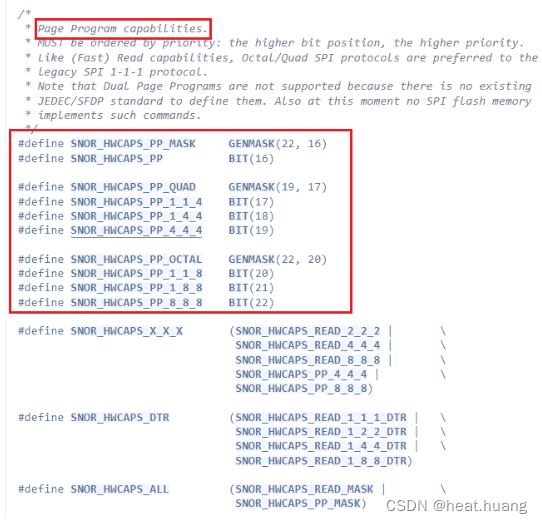
flash的写能力
追 shared_mask
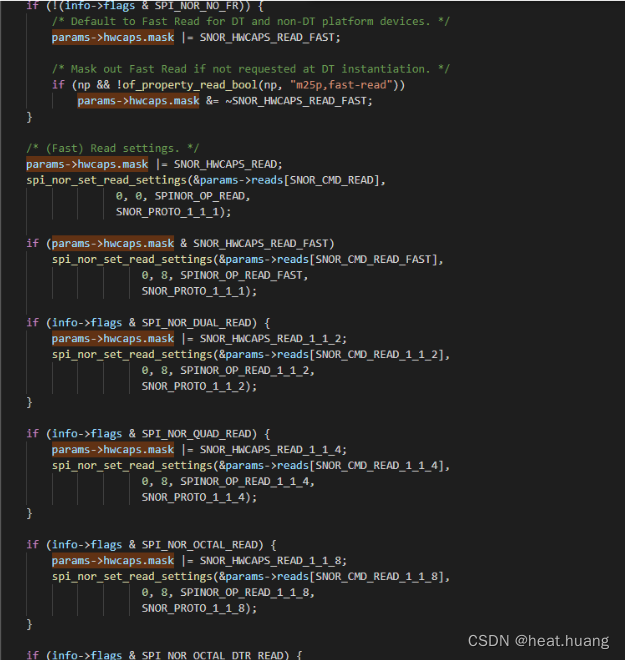
继续追 params->hwcaps.mask
spi_nor_info_init_params 函数中会对 hwcaps.mask 进行赋值
所以这就是内核的兼容性问题。得需要将 Write 和 erase 剥离出来。
3. 我们板子Linux内核启动过程中SPI Flash初始化Log
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [0]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [0]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0x9f] ifr = [0x90] 0x9f 命令是读取SPI Flash的Chip ID
******** heat func [macronix_default_init] enter
*** heat [spi_nor_spimem_read_data] [199] nor->read_opcode = [5a]
*** heat [spi_nor_spimem_read_data] [200] nor->addr_width = [3]
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [1]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [3]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0x5a] ifr = [0x810b0] 0x5A 命令是读取 SFDP ( Serial Flash Discoverable Parameter (SFDP)) 能力集
*** heat [spi_nor_spimem_read_data] [199] nor->read_opcode = [5a]
*** heat [spi_nor_spimem_read_data] [200] nor->addr_width = [3]
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [1]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [3]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x10] icr = [0x5a] ifr = [0x810b0]
*** heat [spi_nor_spimem_read_data] [199] nor->read_opcode = [5a]
*** heat [spi_nor_spimem_read_data] [200] nor->addr_width = [3]
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [1]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [3]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x30] icr = [0x5a] ifr = [0x810b0]
*** heat [spi_nor_spimem_read_data] [199] nor->read_opcode = [5a]
*** heat [spi_nor_spimem_read_data] [200] nor->addr_width = [3]
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [1]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [3]
*** heat [atmel_qspi_set_cfg] [408] iar = [0xc0] icr = [0x5a] ifr = [0x810b0]
******** heat func [spi_nor_select_erase] [2450] wanted_size = 65536
******** heat func [spi_nor_select_erase] [2469] erase->opcode = dc
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [0]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [0]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0x5] ifr = [0x90] 0x5 命令是读取 Flash的 Status Reg
******** heat func [spi_nor_sr1_bit6_quad_enable] enter, ret = 0, bouncebuf = 64
******** heat func [spi_nor_sr1_bit6_quad_enable] enter , line [1808]
******** heat func [macronix_set_4byte_addr_mode] enter
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [0]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [0]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0x6] ifr = [0x10] 0x6 命令是 打开写使能
******** heat func [spi_nor_set_4byte_addr_mode] enter , enable=[1]
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [0]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [0]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0xb7] ifr = [0x10] 0xb7 命令是 使能4Byte address
*** heat [atmel_qspi_exec_op] [419]
*** heat [atmel_qspi_set_cfg] [328] op->addr.buswidth = [0]
*** heat [atmel_qspi_set_cfg] [329] op->addr.nbytes = [0]
*** heat [atmel_qspi_set_cfg] [408] iar = [0x0] icr = [0x4] ifr = [0x10] 0x4 命令是 关闭写使能
spi-nor spi0.0: mx25l25635e (32768 Kbytes)
spi-nor spi0.0: mtd .name = spi0, .size = 0x2000000 (32MiB), .erasesize = 0x00010000 (64KiB) .numeraseregions = 0
5 fixed-partitions partitions found on MTD device spi0
Creating 5 MTD partitions on "spi0":
0x000000000000-0x000000020000 : "at91bootstrap"
0x000000020000-0x000000040000 : "env"
0x000000040000-0x000000100000 : "u-boot"
0x000000100000-0x000001000000 : "system"
0x000001000000-0x000002000000 : "data"
这篇关于Macronix MX25L25645G NOR Flash无法擦除问题分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





