本文主要是介绍特斯拉发布 FSD Beta,激光雷达厂商慌了?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
/ 导读 /
自从上周特斯拉发布全自动驾驶测试版系统 FSD Beta后,有部分美国加州特斯拉Model 3 车主已经通过OTA升级,从各路测试视频来看,FSD Beta版本的功能完善度得到了大幅提升,自动化程度更高,不需要高精地图与激光雷达。


被重写的FSD
特斯拉曾无数次许诺过完全自动驾驶系统到来的期限,这个期限比很多专家的预测早了好几年,着实吊足了用户的胃口。能上天入地的马斯克可能没有想到,车辆实现FSD竟然会这么困难。在原基础框架上打磨多年后,今年8月,马斯克宣布“新软件不是在原有基础上做的优化改进,而是对底层架构的完全重写。”
他表示:在整个重写的过程中,用户可能不会看到任何进展,从重写开始到95%准备好用于量产部署,没有任何东西可以提前交付给用户。只有当开发人员跨过最后关头,才会看到明显的进展。
从马斯克的描述中,可以推断中特斯拉从L3到L4演进的过程,是不断推翻原有基础框架,或许采用了新的底层算法,跳跃式得实现了FSD。
上周,这个被重写的FSD Beta版全自动驾驶系统已经通过OTA给一些早鸟用户升级。从目前网络上流出了一些测试视频来看,FSD Beta的辅助驾驶功能确实得到大幅提升,自动化程度更高。

对比之前的车机可视化界面,这次更新画面从2D转为现在的4D画面,而且视角由车内第一视角变为车后方的上帝视角,不仅能清晰的辨认出多条车道线和护栏,红绿灯和限速标志也能清晰的显示出来。据专家分析,这是通过Birdview映射网络和RNN处理遮挡等,实现了感知系统的深度预测和时间预测。
官方对FSD Beta版本的功能是这样介绍的:
FSD的Beta版本将是一个非常受限制范围内使用的软件,人类司机使用者应该提供更高的监控力度,因为在不确定中,Beta版本可能会做出错误的判断和决策,因此需要您提供最大程度的监视和控制。所以需要驾驶员不可掉以轻心,始终将手放在方向盘上,并持续观测路面的交通状态。
按照设计目标,当FSD Beta启动激活时,将会自动控制您的车辆在高速道路状态下自动换道,且自动按照导航的线路方向,在分岔路口做出正确选择(驶离或者选择道路方向);同时还可以按照导航的线路方向处理和其它车辆和目标的关系(navigatearound),比如超车等;同时还可以自动实现左转和右转(没有强调左转是否受到信号系统保护)。在以下情况下,提醒人类驾驶员要始终关注FSD Beta版本的工作状态并准备随时接管,比如:视觉死角区域、十字路口、狭窄且拥挤的行驶区域。

FSD Beta版本一些功能已经得到了早期用户的验证,比如支持路口红绿灯识别,自动选择车道并遵守让行规则,遇到路障也可顺利地进行自主避让,无保护的左转。即使是没有任何标线、路边停满车辆的复杂路面,FSD仍可识别出绝大部分交通参与者并顺畅通过。

不需要激光雷达,也不需要高精地图

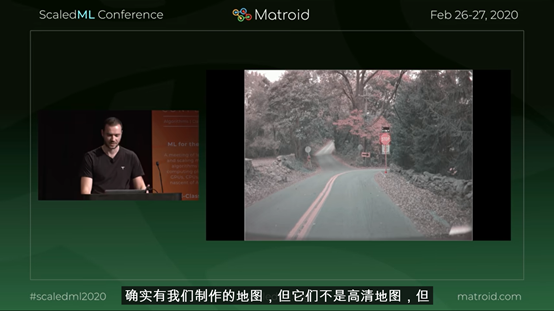
“No Lidar,No HD maps."这是特斯拉AI高级总监 Andrej Karpathy 在年初的机器学习大会上提到的。
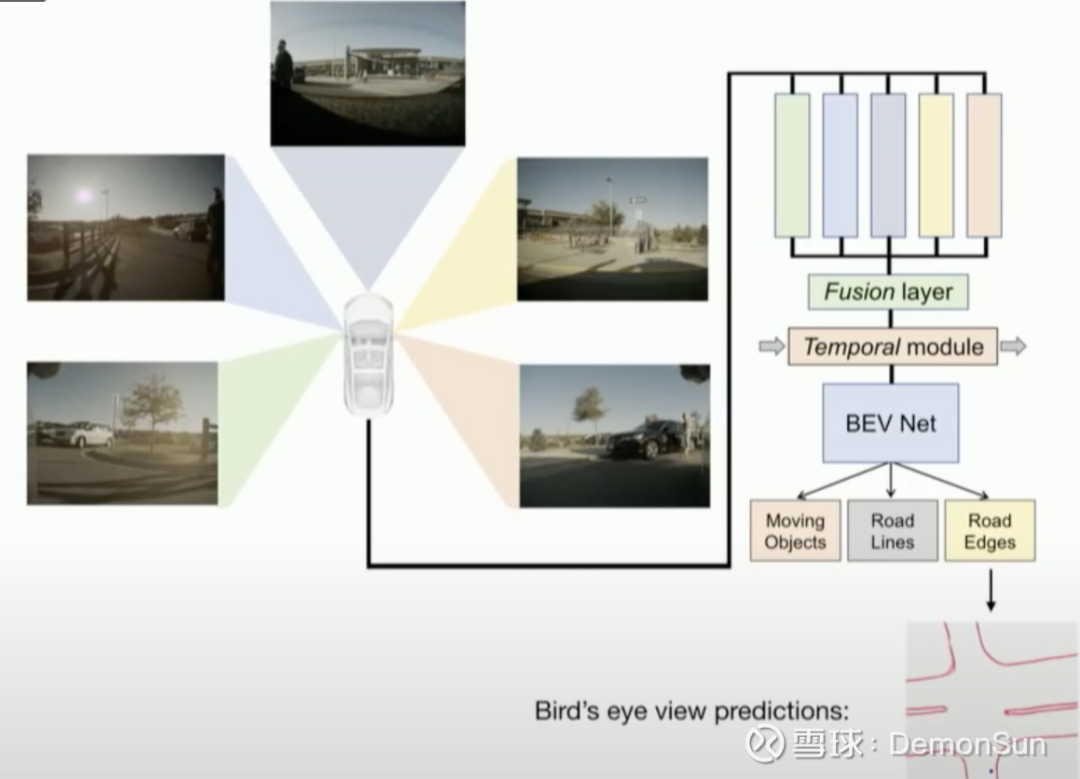
此次FSD Beta 系统发布果然印证了他的话,全视觉方案,不必提前加载高精地图就能实现定位转向等动作。不过,不用激光雷达并不能代表着不能借鉴激光雷达识别的原理,根据之前透漏的资料显示,特斯拉通过视觉的拼接打造出了一种激光雷达效果的向量空间鸟瞰图。
该方法通过将多个不同角度的视频文件合并到融合层,再将融合层中视频内容加工处理进入时态模块形成点状的数据,点状数据汇集到BEV网中,组成分类信息(运动物体,道路线,道路边缘线等),进而形成类似于激光雷达的效果,说白了特斯拉是想通过神经网络机器学习的算法模型方式去代替激光雷达的工作方式。
不知道是不是该算法的运用导致了FSD的重写,也不知道借鉴激光雷达识别的原理是否打脸了当时马斯克提到的第一性原理,只要让机器足够模仿人开车的状态就能学会驾驶。伪激光雷达似乎成为了特斯拉实现无人驾驶的捷径,不能模仿人,可以用摄像头来模仿激光雷达,借助最先进的算法,赶上那些昂贵的硬件玩家。
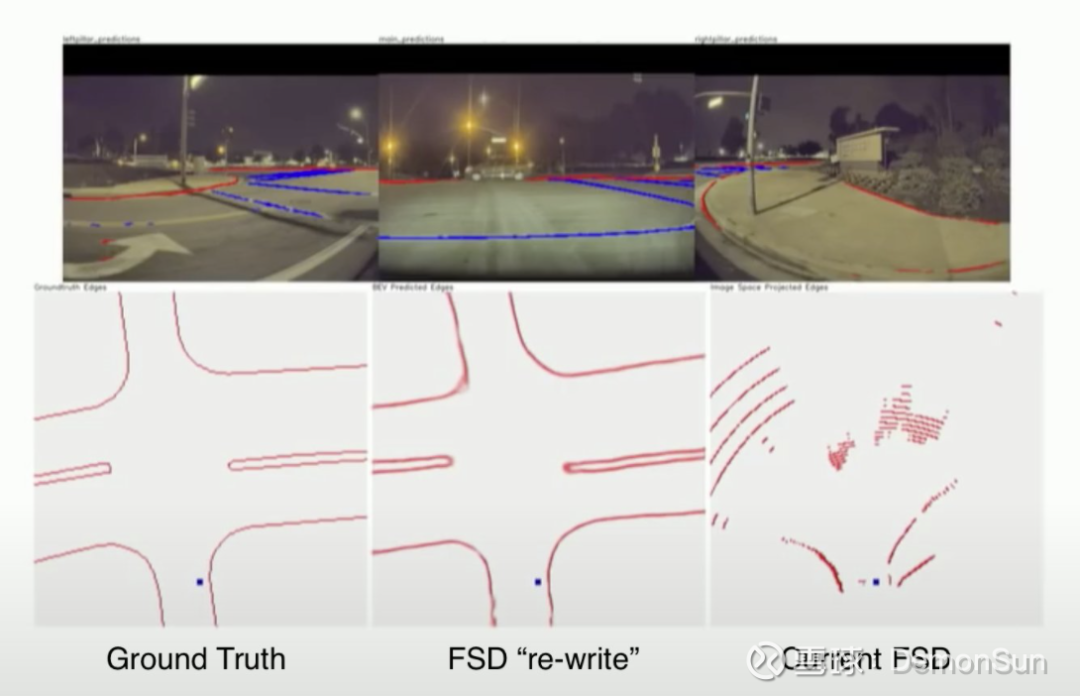
从上图重新修改后的FSD和目前FSD的差异中,可以看出老的FSD无法预测交叉路口的布局,重写后的FSD与真实的地图数据相比,真实地预测了交叉路口的布局,如果没有重写,FSD无法在交叉路口采取没有任何干预的转弯操作,这在水平视角上尤为明显,短短几个像素的差距就会在地图映射上产生大量噪音。
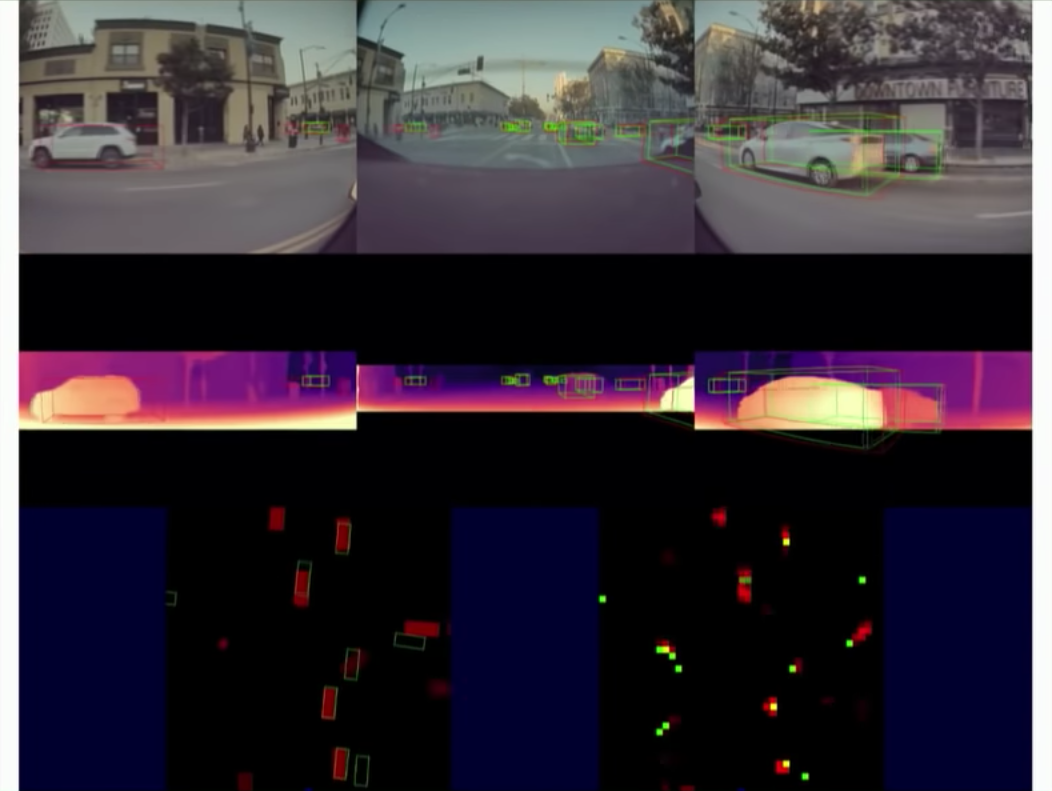
重写的FSD优势还体现在障碍物的时间预测上,也就是马斯克所说的“在3d空间中标记”。现在有一个专用的NN来预测每个像素的深度。这就雷同于模拟LiDAR(激光雷达),利用该“点云”随时间对3d空间中的对象进行分类一样的道理。
硬件不够,软件来凑。LiDAR的优势正在迅速消失,因为基于视觉的神经网络可以为自动驾驶汽车提供足够精确的现实点云图。所以我们在UI界面上看到的不是高精地图。

激光雷达厂商还有机会?
特斯拉对一小波早期用户提供FSD Beta 后,目前已计划为不同州的EAP成员推出完整的自动驾驶FSD Beta。
这种取代了激光雷达和高精地图的特斯拉纯视觉方案,一定会激光雷达厂商、高精地图厂商以及一些Lidar方案的解决方案商很大压力,通过更低的成本控制,而且运用的都是车规级配件,已经实现了大规模量产,拥有庞大的数据库。
不过,目前的版本是否足够安全仍需要被验证。尽管FSD Beta版本发布时间很短,有些用户已经在测试中发现了一些安全隐患,自动驾驶时仍需要保持注意力准备随时接管,用马斯克的话说“该系统仍有可能在错误的时间做出错误的决策。”
其次,未来的自动驾驶汽车仍可能是多样性的。绝对安全可能永远是个伪命题,未来自动驾驶系统的安全性可能会像现在的被动安全一样求同存异,形成多种方案。所以,尽管配有激光雷达和高精地图方案目前来说是个奢侈品,但在硬件上的强大性能是无与伦比的。特斯拉通过深度学习视觉算法去代替激光雷达,势必也会牺牲掉一部分算力,随之而来的影响还未显现出来。所以,FSD Beta版本发布,但摄像头和激光雷达的传感器方案之争还未定胜负。
- End -
这篇关于特斯拉发布 FSD Beta,激光雷达厂商慌了?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








