本文主要是介绍起重机创意大赛比赛总结(7.17-8.17),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
校赛结束(7.14)以后我们才正式制作起重机器人,时间比较短,熬了若干个通宵以1分11秒获得了区域赛(7.31)第一名,区域赛以后换了几个步进电机并加入了加减速算法将时间压缩到了50秒,由于准备时间比较短,整个机械机构不太稳定限定了整个搬运的极限最短时间。国赛(8.17)由于运输问题导致结构变形、板子部分引脚烧毁只获得了国三。
目录
- 1 比赛规则
- 2 搬运视频
- 3 机械结构
- 3.1 移动
- 3.2 转动
- 3.3 抬升
- 4 物体抓取
- 5 物体识别
- 6 吸盘改造
- 7 注意事项
- 8 相关文章
1 比赛规则

三个乐扣盒、三罐可乐随机放置在取物区,起重机器人需要将这个6个物体搬运至堆码区堆叠起来,两个堆码区分别由4整包打印纸垂直堆放组成,若将这6个物体放置于同于堆码区上将有额外加分。乐扣盒、可乐、打印纸规格如下:

可乐330ml,高123mm,外径66mm
搬运总分由总搬运分(搬运物体、时间、放置方式)、作品重量分、创新分构成

比赛初期我们一直在思考如何减小重量、因此我们电机均选用的42步进电机、结构也不太稳定,通过后期计算发现只要速度够快,重量分可以忽略不记,因此首先应该考虑的是搬运的成功率和搬运速度(42电机+减速器:速度够了扭矩不够、扭矩够了速度又慢了,不如直接大电机带减速器),步进电机一定要带减速器,不然精度会不够
2 搬运视频
3 机械结构
整体结构大致如下图所示:

3.1 移动
整个起重机移动通过两个42步进电机(带减速器)驱动橡胶轮实现,本起重机器人有两个主动轮、两个从动轮
3.2 转动
转动通过步进电机驱动齿轮转盘轴承实现,上面整个部分安装于齿轮转盘上,随着齿轮转盘转动而转动,此处使用的电机是42电机带14减速比,转动需要的精度比较高
3.3 抬升
整个机构抬升部分我们采用的是导程为10的丝杠,抬升部分是最耗时的操作,如果电机驱动力比较大可以采用更大导程的丝杠,或者直接用齿轮齿条或者带轮驱动,这样能极大的缩减抬升时间
4 物体抓取
物体抓取采用吸盘结构、一次性将6个物体同时吸起再依次放置。若采用淘宝直接购买的吸盘对控制精度要求及其高,吸盘几乎要正对可乐才能将可乐吸附起来,因此吸盘需要进行改造(改造部分见后文)
原来我们采用6个泵,后来听取了xx的意见为了减少重量改为了3个泵即一个泵控制两个吸盘,这样控制难度增大了、吸盘的吸附能力减弱了很多,重量减少的微乎其微,不如采用6个泵,吸附更加快速、牢靠
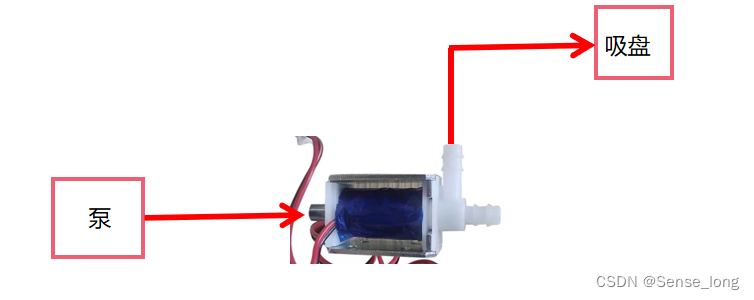
为了获得更大的吸附力。我们采用的大气量18L的真空泵

泵末端两个电极正负可以颠倒、只要通电就可以,泵的两个口其中之一为进气口、另外一个是出气口,要注意区分,
进气口通过软管连接至吸盘,泵将软管内空气抽出就和外界形成了压强差,从而将物体吸附。
为了顺利放置物体,还需要使用电气阀,需要放置物体时将吸盘处与大气接通,从而将物体放置
电气阀原理如下图:

上图所示电气阀,未通电情况下,A口与B口导通,通电后B口与C口导通
泵、电气阀、吸盘连接如上图所示,抓取物体时,泵通电,此时A口、B口导通,从而将物体吸附。放置物体时,阀通电、泵断电,B口、C口导通,吸盘处从而与大气导通,将物体放置
泵和电气阀的开关通过继电器来实现,继电器与控制器一定要共地(GND相连),使用同一个电源也能达到共地的效果,这样控制器才能成功控制继电器
5 物体识别
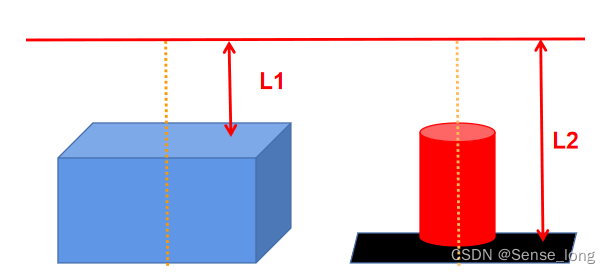
物体识别(识别可乐和乐扣盒)采用了6个超声波模块
可乐和乐扣盒俯视图如下
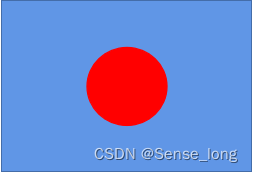
蓝色区域代表乐扣盒,红色区域代表可乐,两者俯视面积不同,超声波测距模块垂直向下安装,安装区域在蓝色区域内。
若为可乐时,超声波直接测量到达地面的距离;为乐扣盒时,超声波测量达到乐扣盒上表面的距离,两者距离不同,从而对可乐和乐扣盒进行了识别。
6 吸盘改造
若采用网上直接购买的吸盘,其对控制精度要求及其高,难以实现
因此我们要扩大吸附误差允许范围
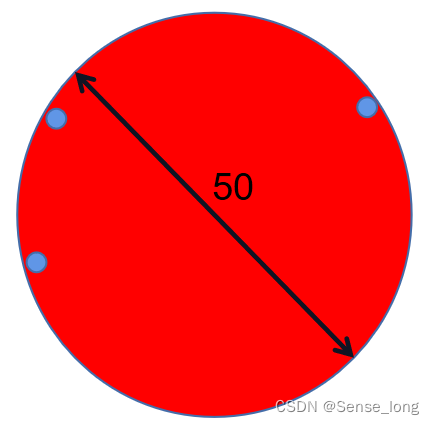
上图中,红色区域为可乐俯视图,蓝色点为吸盘的吸孔,理论情况下当吸盘的孔位于可乐边缘时为最大误差,在这种极限情况下若能将可乐吸附就大大减小了控制难度,这种情况下吸盘半径应该在可乐半径的基础上再加上个可乐半径,即吸盘的半径应该为50mm。
最初改造后的吸盘效果如下:
最初改进吸盘
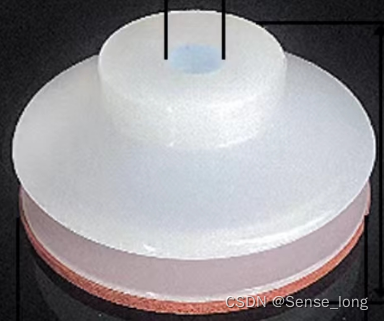
最终吸盘如下图所示:

吸盘扩展部分由一层0.7mmPVC塑料板和一层2mm硅胶片依次由胶水粘结组成,中间的通气孔越小越好
7 注意事项
1、布线完成后可以多使用缠绕管,将线进行包裹,更加美观
2、结构部分若为导电金属,各模块正反面绝缘包裹要做好,严重可能会烧坏板子或者模块(血的教训)
3、继电器的瞬间接通可能会对单片机控制造成影响,要做好隔离
4、结构的稳定性对后续编程影响很大,对于该比赛速度最重要,因此要首先考虑结构稳定性和电机的驱动能力
8 相关文章
1、通过STM32CubeMX快速使用超声波模块
2、步进电机简单使用:STM32 PWM输出固定数目的脉冲数(基于CubeMX)
希望这篇文章能够帮助到一些同学,如果有帮助请点个赞,谢谢~
这篇关于起重机创意大赛比赛总结(7.17-8.17)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





