本文主要是介绍结构光多频外差法原理和代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、相移法原理
结构光法原理其实是跟双目视觉一样的,都是要确定对应“匹配点”,利用“视差”三角关系计算距离,所不同的是:
双目视觉通过“被动”匹配唯一特征点
相移法作为结构光法中的一种,通过主动投影多副相移图案来标记唯一位置。虽然大多数结构光系统是单目的,但我们可以将其“双目”的,因为投影仪可以看做是一个“逆向”的相机,明白了这点,对于结构光系统一些公式推导就容易很多。
对于“双目”系统来说,最重要的工作是通过唯一标记来标记某一点,假设我们只投射一个周期的数据,我们从投影仪投出去的光栅公式如下:

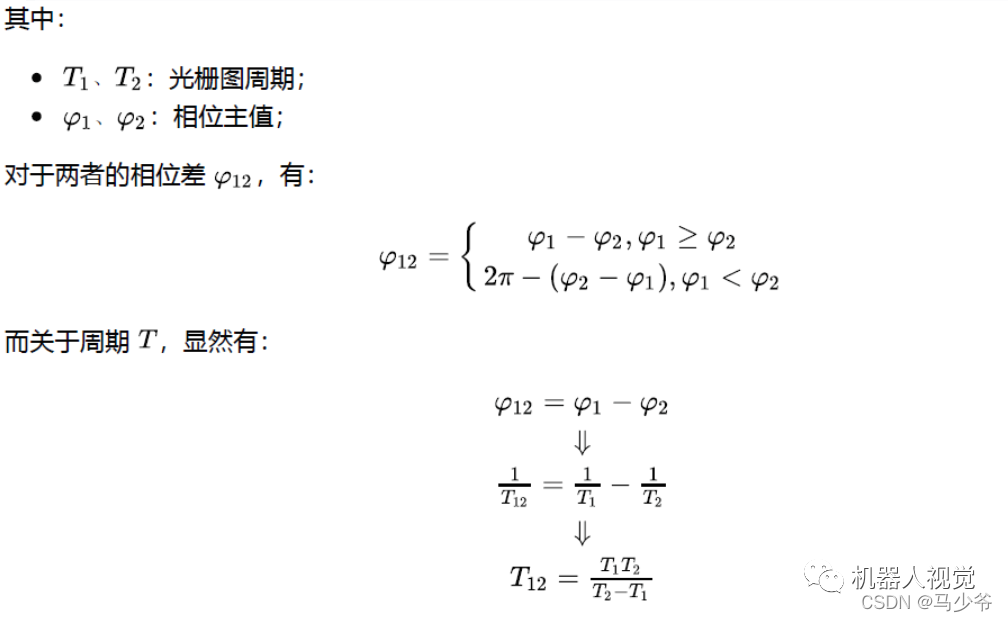
其中:
比如说四步相移公式:
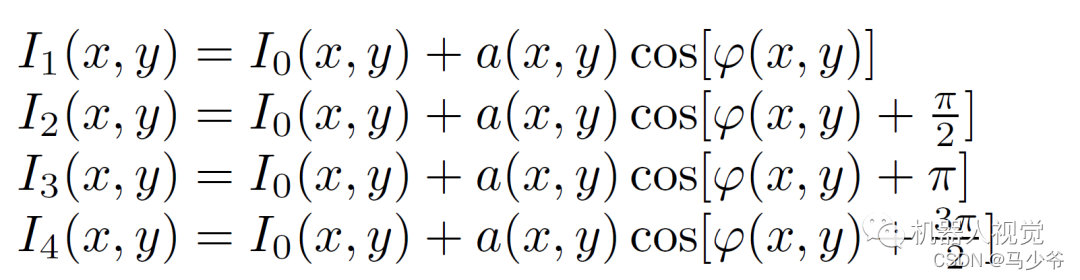
需要说明的是,虽然这个公式对整副相移图像的,但是这公式对每个像素都是独立的,所以即使我们拿从相机拍摄到经过调制变形的图像来求解,依然可以得到单个像素点唯一的相位主值。
我们主要关心的是求解出相位主值,因为它对每个像素点是唯一的,假设我们从相机中获取了这四副图像,那怎么反过来求解相位主值?
联立4个方程,得到:

无论拍摄到什么图像,我们要得到某个像素点的唯一“标记”,也就是这个相位主值,代回这个公式即可,都可以得到唯一值。得到了唯一值,建立匹配关系,就可以利用三角公式进行重建。
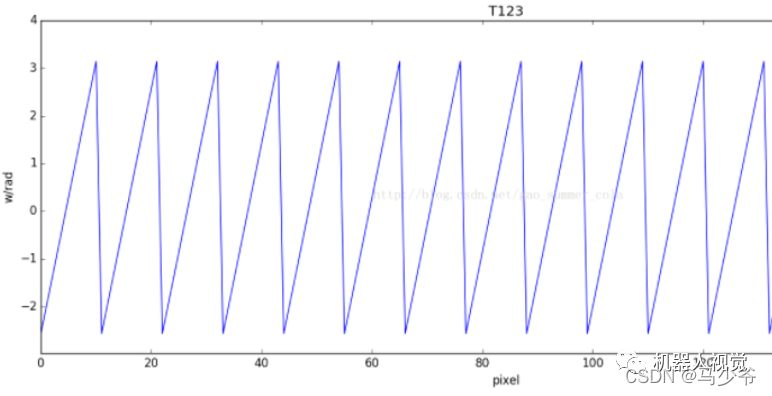
其中:横坐标为任意一行的像素,这张图中使用周期为11的像素条纹作为正弦光栅。
2、双频外差原理
解决的方法有很多,分为空域和时域展开两种:
空域展开:依靠空间相邻像素点之间的相位值恢复绝对相位,如果重建表面不连续,则出现解码错误。
时域展开:将每个像素点的相位值进行独立计算,有格雷码和多频外差两种,其中格雷码方法对物理表面问题敏感,并且多投影的图并不能用来提升精度,多频外差精度更高。
当然目前还有更多精度更高、效率更快的相位展开方法,在这里暂时不予讨论,这里主要讨论多频外差原理。
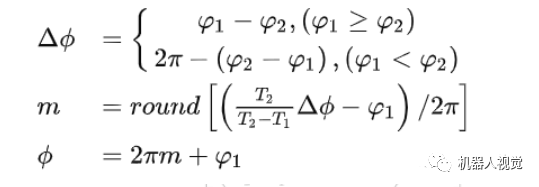
多频外差原理:通过多个不同频率(周期)正弦光栅的相位做差,将小周期的相位主值转化为大周期的相位差,从而使得相位差信号覆盖整个视场,然后再根据相位差来得到整副图像的绝对相位分布。
这里以双频外差为例,原理如图1所示:
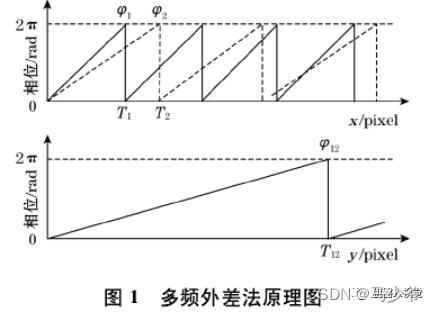
通常我们说的相位函数的周期,代表的是一个周期正弦函数所占的像素单位个数。
从上述公式可以看出,我们使用两种不同周期的相位值叠加得到一种周期更长的相位函数,为了能够利用多频外差原理实现全场无歧义的相位展开,我们必须选择合适的T1和T2,使得T12能够超过整个视场,从而获得唯一的相位。
3、多频率外差原理
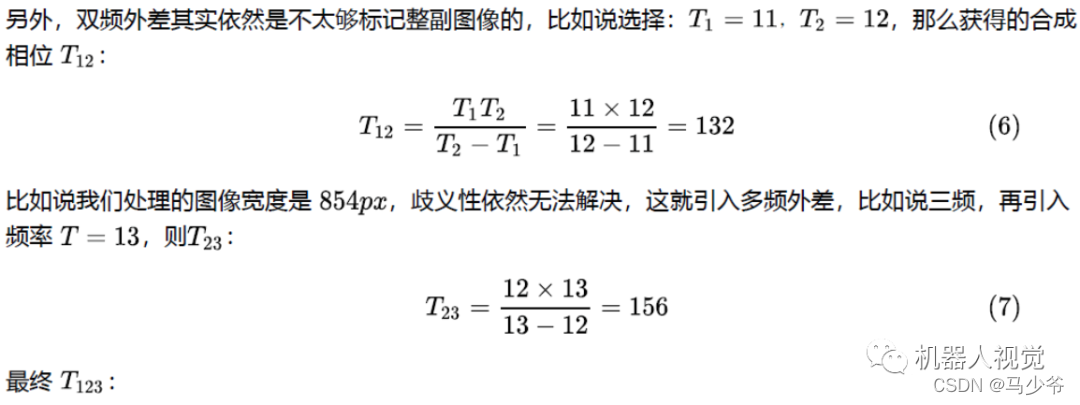
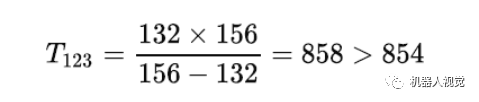
其可以完成整个视场的无歧义标记。
4、代码实践

依据相移法得到的包裹相位图如下图所示,不同颜色代表不同频率的相位主值:
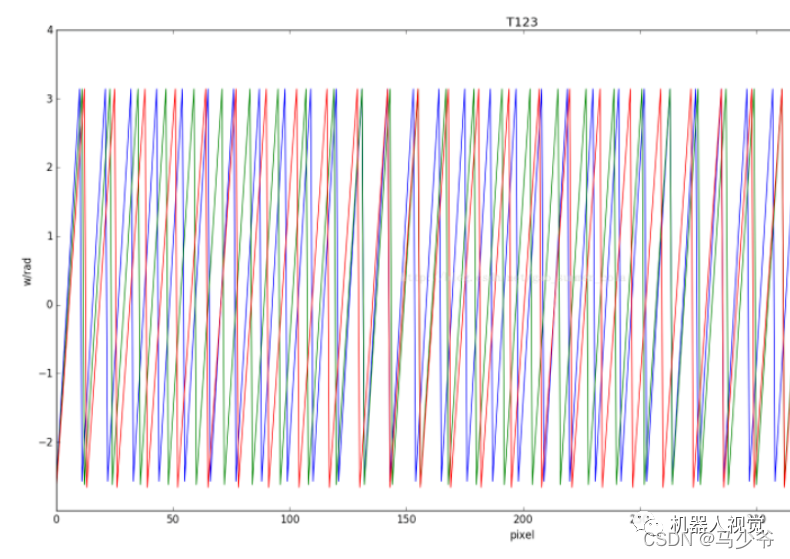
我们进行叠加后的效果:
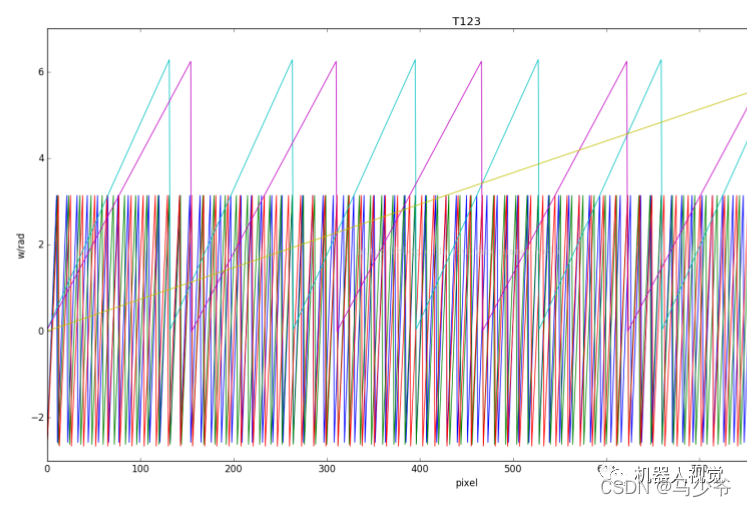
在这里,我们可以看到,由两个周期小的相位可以合成一个周期更大的编码图案。

其中:

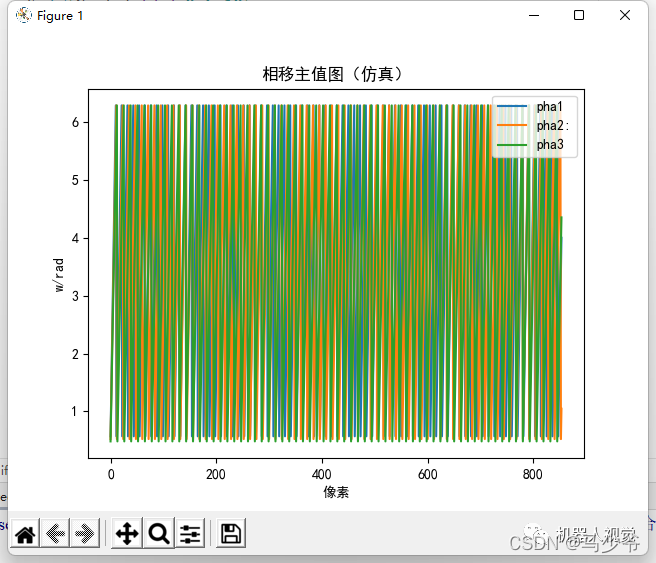
明白了原理,我们来代码实践一下,需要注意的是,求解出来的相位我们要进行归一化到区间操作:
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号def phase_simulation(WIDTH, T1, T2, T3):pha1, pha2, pha3 = np.zeros(shape=WIDTH), np.zeros(shape=WIDTH), np.zeros(shape=WIDTH)t1, t2, t3 = 1, 1, 1for idx in range(WIDTH):if t1 > T1: t1 = 1 # 重置一下pha1[idx] = (t1 / T1) * 2 * np.piif t2 > T2: t2 = 1pha2[idx] = (t2 / T2) * 2 * np.piif t3 > T3: t3 = 1pha3[idx] = (t3 / T3) * 2 * np.pit1 += 1; t2 += 1; t3 += 1return pha1, pha2, pha3def parse_phase(pha1, pha2, T1, T2):pha12 = np.zeros_like(pha1)# 计算Delta(如果满足条件,输出左侧,否则右侧)pha12 = np.where(pha1 >= pha2, pha1 - pha2, pha1 - pha2 + 2 * np.pi)# # 跟下面这段代码等价# for idx in range(0, pha12.shape[0]):# if pha1[idx] >= pha2[idx]:# pha12[idx] = pha1[idx] - pha2[idx]# else:# pha12[idx] = pha1[idx] - pha2[idx] + 2 * np.piT12 = T1 * T2 / (T2 - T1)# 方法1pha12 = T2 / (T2 - T1) * pha12# # 方法2# m = np.round((T2 / (T2 - T1) * pha12 - pha1) / (2 * np.pi))# pha12 = 2 * np.pi * m + pha12# 归一化到[0,2π]min_value, max_value = np.min(pha12), np.max(pha12)pha12 = (pha12 - min_value) * (2 * np.pi / (max_value - min_value))return pha12, T12if __name__ == '__main__':# 视场宽度WIDTH = 854# 条纹周期T1 = 11T2 = 12T3 = 13pha1, pha2, pha3 = phase_simulation(WIDTH, T1, T2, T3)X = np.arange(0, WIDTH)plt.plot(X, pha1, label="pha1")plt.plot(X, pha2, label="pha2:")plt.plot(X, pha3, label="pha3")plt.title("相移主值图(仿真)")plt.xlabel("像素")plt.ylabel("w/rad")plt.legend()plt.show()# 解相位pha12, T12 = parse_phase(pha1, pha2, T1, T2)pha23, T23 = parse_phase(pha2, pha3, T2, T3)pha123, T123 = parse_phase(pha12, pha23, T12, T23)plt.plot(X, pha12, label="pha12")plt.plot(X, pha23, label="pha23")plt.plot(X, pha123, label="pha123")plt.title("解出绝对相位")plt.xlabel("像素")plt.ylabel("w/rad")plt.legend()plt.show()
测试结果如下:
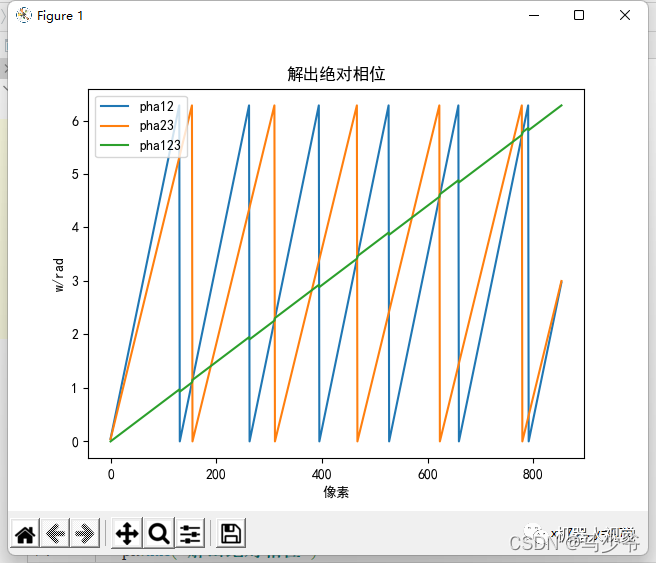
可以看出,最终解出的绝对相位线单调递增,每个相位值是唯一的,虽然在一些交界处会有些许误差。结构光多频外差的原理很简单,而精度这块,其实很大程度依赖于标定、高反处理这些地方。
这篇关于结构光多频外差法原理和代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






