本文主要是介绍Ubuntu20.04系统Mip-NeRF代码复现(pytorch),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
仅仅复现出Mip-NeRF论文所提出的实验,不包含原理的介绍。
代码链接:
hjxwhy/mipnerf_pl(仅仅进行了训练,并没有渲染出视频,训练得到的质量不错,PSNR几乎都在35左右)
bebeal/mipnerf-pytorch(训练、渲染视频、导出mesh,比较顺利)本篇文章复现的是这个项目
给出一些关于Mip-NeRF原理讲解的博客:
mip-NeRF
Mip-NeRF论文笔记
Mip-NeRF阅读笔记
目录
一、系统环境安装
二、数据集的获取
三、训练
四、渲染视频
错误一:
错误二:
五、导出mesh
报错:
解决方法:
补充:
一、系统环境安装
操作系统:Ubuntu 20.04
显卡:RTX3090
使用miniconda搭建环境
注:本次复现的代码和配置环境的代码不一样,主要是我第一次在github上复现的那篇渲染不出视频,我也不晓得出现了啥子问题,有可能我没有训练完,训练了八个轮次就终止了(我看一篇综述论文上说mip-nerf训练只需要三个小时,我训练了十多个小时,感觉时间太长了),于是我另外找一个mip-nerf pytorch版的代码进行复现。
环境配置请参考:hjxwhy/mipnerf_p
# Clone the repo
git clone https://github.com/hjxwhy/mipnerf_pl.git; cd mipnerf_pl
# Create a conda environment
conda create --name mipnerf python=3.9.12; conda activate mipnerf
# Prepare pip
conda install pip; pip install --upgrade pip
# Install PyTorch
pip3 install torch torchvision --extra-index-url https://download.pytorch.org/whl/cu113
# Install requirements
pip install -r requirements.txt
二、数据集的获取
我采用的是nerf_synthetic数据集,在网上下载就可
下载链接:nerf_data(里面有很多其他的关于nerf的数据集,都可以使用建议下载到u盘备份)
如果网速卡,下载很慢的话可以评论区留言,我把数据集的百度网盘链接发给你。
下载万数据集后建议和代码放在一个文件夹中,并命名为data方便管理和输入数据地址。
三、训练
配置好上述环境和数据集后就可以进行训练了,在终端输入:
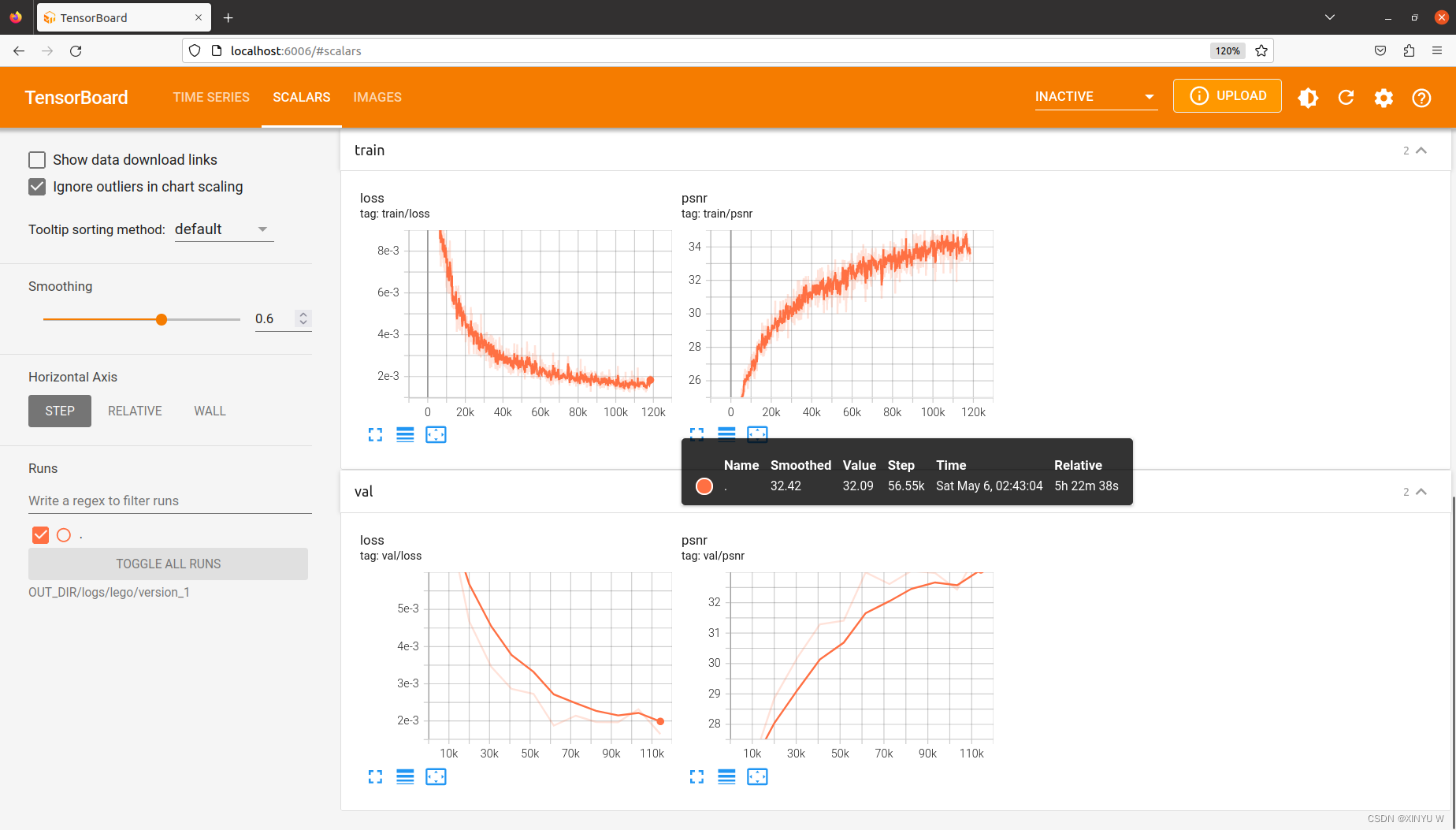
python train.py 就开始进行长达十八个小时的训练了,这训t练时间和我看的论文描述的不一样啊,但是质量还是不错的,psnr也比较高,期间可以打开tensorboard进行观察变化,能看到损失和psnr的变化。
python -m tensorboard.main --logdir=log #在终端输入,即可打开tensorboard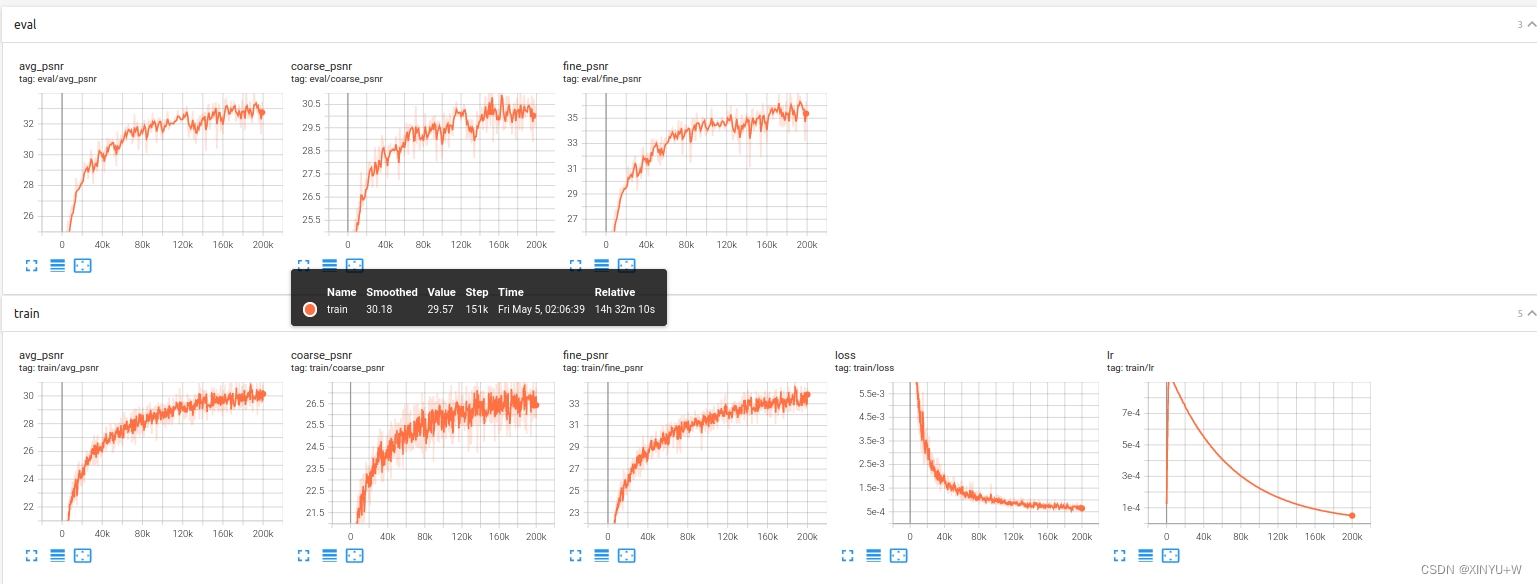
四、渲染视频
渲染视频运用到visualize.py这个文件,只需要在终端中输入即可
python visualize.py #以从经过训练的模型中渲染视频但是我在渲染出视频的时候出现了几个错误
错误一:
TypeError: _open() got an unexpected keyword argument 'codecs'解决方案:打开visualize.py文件,直接进行修改。只需要将代码中的codecs参数替换为codec,如下所示:
imageio.mimwrite(path.join(config.log_dir, "video.mp4"), rgb_frames, fps=30, quality=10, codec="hvec")
if config.visualize_depth:imageio.mimwrite(path.join(config.log_dir, "depth.mp4"), depth_frames, fps=30, quality=10, codec="hvec")
if config.visualize_normals:imageio.mimwrite(path.join(config.log_dir, "normals.mp4"), normal_frames, fps=30, quality=10, codec="hvec")这个代码段中的imageio.mimwrite()函数被用来写入视频文件。错误消息中提到了一个不期望的关键字参数codecs,这是因为在最新版本的imageio库中,mimwrite()函数已经将codec参数更改为codec,因此使用旧的codecs参数会导致错误。
错误二:
Unknown encoder 'hvec'
Traceback (most recent call last):
File "/home/wxy/miniconda3/envs/mipnerf/lib/python3.9/site-packages/imageio_ffmpeg/_io.py", line 493, in write_frames
p.stdin.write(bb)
BrokenPipeError: [Errno 32] Broken pipeDuring handling of the above exception, another exception occurred:这个错误消息表示在使用imageio.mimwrite()函数时,尝试使用未知的编码器hvec,因此无法写入视频文件。此外,还发生了BrokenPipeError异常,这可能是由于进程在写入数据时被意外中断或终止导致的。
为了解决这个问题,可以尝试使用另一个编码器,或者安装支持hvec编码器的库/插件。hvec编码器通常需要特殊的硬件支持,因此可能需要检查你的计算机是否支持该编码器。
另外,也可以尝试减少视频的质量和帧率,以减轻编码器的负担,从而避免BrokenPipeError异常的发生。例如,可以将代码中的quality参数设置为更低的值,如5或2。
解决方案:
imageio.mimwrite(path.join(config.log_dir, "video.mp4"), rgb_frames, fps=30, quality=5, codec="h264")
if config.visualize_depth:imageio.mimwrite(path.join(config.log_dir, "depth.mp4"), depth_frames, fps=30, quality=5, codec="h264")
if config.visualize_normals:imageio.mimwrite(path.join(config.log_dir, "normals.mp4"), normal_frames, fps=30, quality=5, codec="h264")我是将"hvec"修改成"h264"并且quality由10降到5,最后渲染出来的视频效果不好。
video
五、导出mesh
导出mesh需要用到extract_mesh.py这个文件
python extract_mesh.py #render a mesh from the trained model报错:
缺少mcubes这个包,如果直接使用 pip install mcubes来安装这个包会出现以下错误
ERROR: Could not find a version that satisfies the requirement mcubes (from versions: none)
ERROR: No matching distribution found for mcubes解决方法:
pip install pymcubes
#有可能还会缺少一些包,直接安装就好
pip install PlyData接下来就可以提取mesh了,大概十分钟后就结束,会生成一个mesh.ply文件,之后直接导入到meshlab中就可以打开mesh
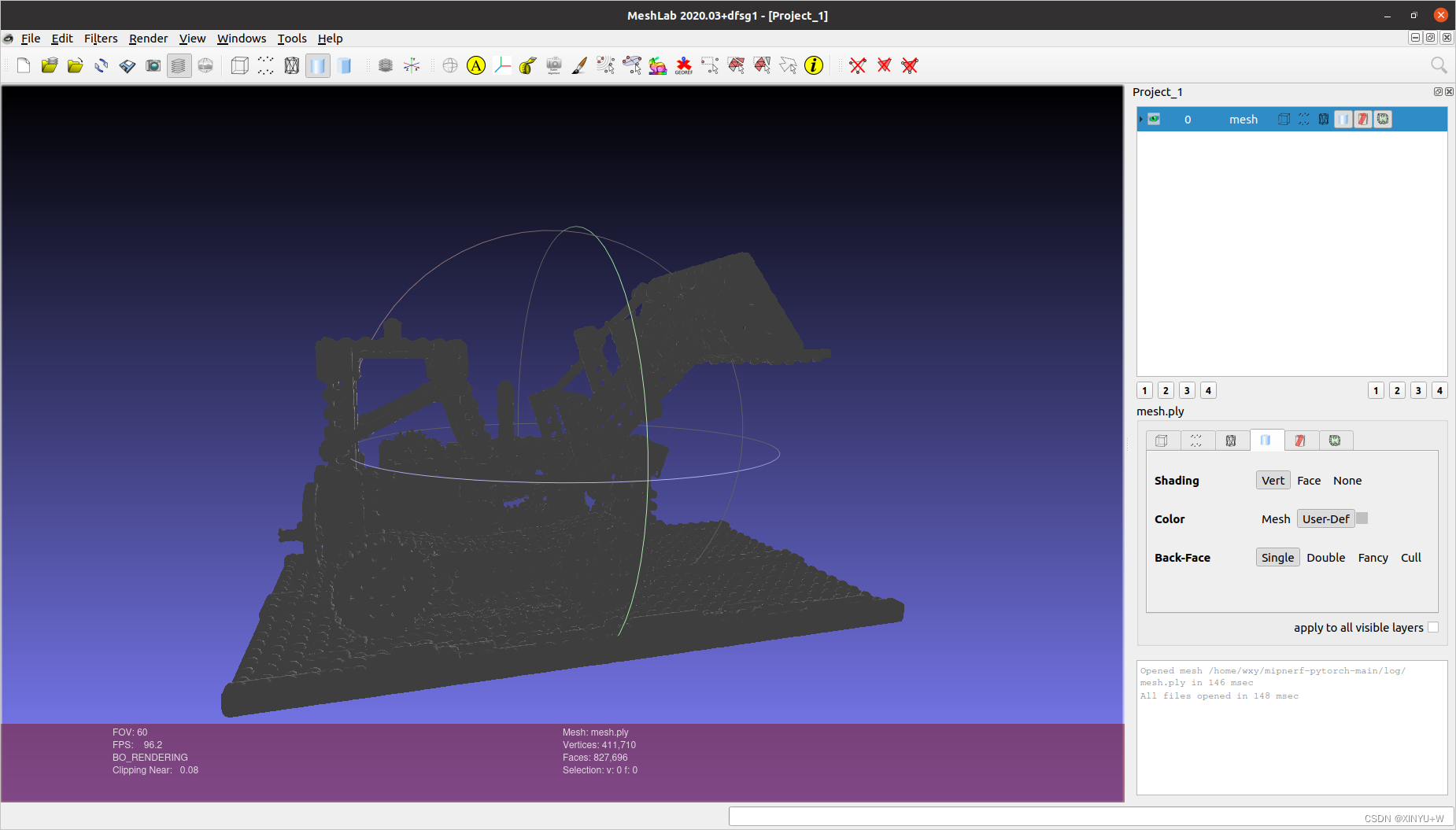
可以看出这个mesh效果还是非常不错的,mip-nerf是继基线nerf后提出比较有意义的一次创新,使用锥跟踪代替标准NERF体绘制的光线跟踪。通过引入集成位置编码实现了这一点。 为了生成一个单独的像素,从摄像机的中心沿观察方向投射一个圆锥,穿过像素的中心。
=========================================================================
补充:
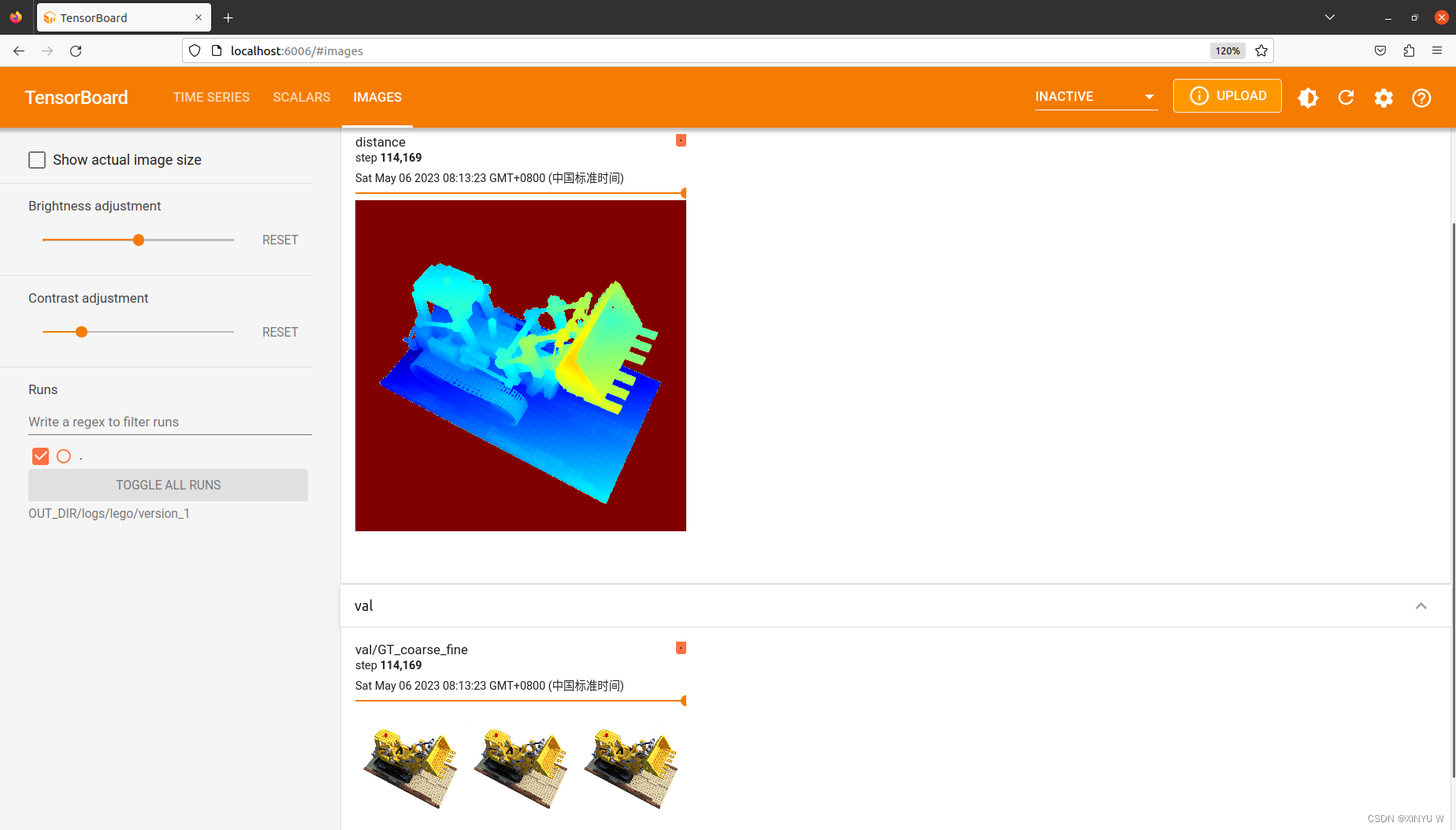
关于hjxwhy / mipnerf_pl
我又尝试了一下,在训练的时候打开tensorboard观察,可以看到图像和深度图,效果还是不错的,我也只训练了五个轮次,在训练的时候可以打开tensorboard模型的查看。
这篇关于Ubuntu20.04系统Mip-NeRF代码复现(pytorch)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






