本文主要是介绍FDTD (二)仿真区域的设置2(边界条件PML、Metal、Periodic、Symmetric、Anti-Symmetric、Bloch、PMC),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FDTD 边界条件的设置
FDTD(由于能力有限,文中有任何不妥之处与我联系,感谢大家的批评指正)
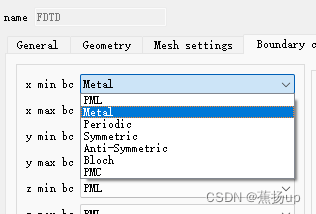
在FDTD中一共有7种边界条件的选择,分别是PML、Metal、Periodic、Symmetric、Anti-Symmetric、Bloch、PMC。
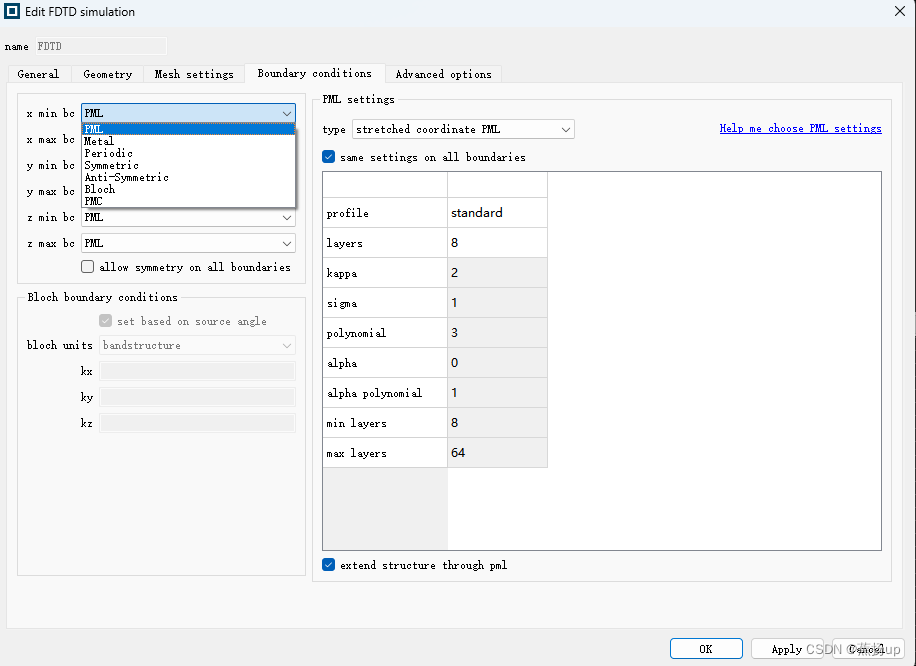
PML
PML是一种假想的材料或结构,把仿真对象包裹起来,使之完全吸收掉射向远方的光。但实际上多少会反射一些光,需要设置使得这个反射最小。PML在数值计算上边也会带来一些不稳定性。
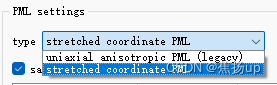
- type选择
PML的类型选择一般选择 stretched coordinate PML
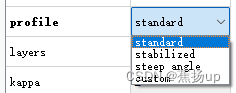
- profile选择
轮廓的选择有四种类型 standard stabilized steep angle custom
1 standard(标准)
仿真时间短,需要要求仿真结构在边界内。相对较少PML层数就可以达到较好的仿真效果,优先选择此类型。只有Layers(层数)可以选择。
2 stabilized(稳定)
仿真时间长,适用于仿真结构超出边界。避免不稳定的情况出现,增加了PML的层数。只有Layers(层数)可以选择。
3 steep angle()
适用于PML边界与periodic边界同时使用时,此类型的吸收效果比 standard(标准)类型差,但有助于吸收几乎平行于PML边界的光。只有Layers(层数)可以选择。
4 custom()
可以设置PML的各种参数,缺省值是standard。
Metal
全反射边界:无损耗仿真,仿真速度快。
Bloch和periodic边界
Periodic是Bloch边界的特殊情况,Bloch边界处理时电场分量会有一个相位修正,而Periodic边界直接复制在一个周期单元一边入射的电场,重新在周期另一单元的另一边入射。当光波矢垂直于平面入射时,Periodic和Bloch边界相同。
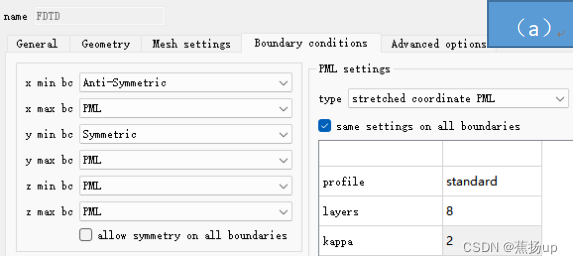
Symmetric和Anti-Symmetric边界
Symmetric:要求垂直对称面的电场为0,平行于对称面的电场为非0。
Anti-Symmetric:要求平行对称面的电场为0,垂直于对称面的电场为非0。
只要电磁场有一个通过模拟区域中间的对称平面,就可以使用对称性边界条件。通过利用这种对称性,仿真体积和时间可以成倍减少。
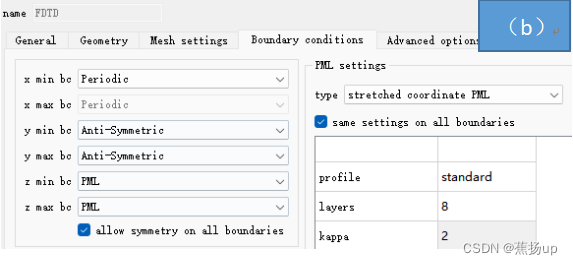
Tip:图(a)是独立边界设置对称和反对称,可以减少仿真区域和时间,图(b)是设置的周期结构对称面。
这篇关于FDTD (二)仿真区域的设置2(边界条件PML、Metal、Periodic、Symmetric、Anti-Symmetric、Bloch、PMC)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







