本文主要是介绍【致敬未来的攻城狮计划】— 连续打卡第二十天:RA2E1_UART —— 串口通信例程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
1.连续打卡第一天:提前对CPK_RA2E1是瑞萨RA系列开发板的初体验,了解一下
2.开发环境的选择和调试(从零开始,加油)
3.欲速则不达,今天是对RA2E1 基础知识的补充学习。
4.e2 studio 使用教程
5.Keil配置使用(使用 RASC 生成 Keil 工程)
6.Keil配置使用(使用 RASC 生成 Keil 工程)
7.(电脑重装系统)学习RA产品家族选型手册
8.问题解决、学习RA寄存器、用寄存器的方式点亮第一个LED灯。
9.继续学习RA寄存器
10.FSP固件库开发及FSP配置详解。
11.FSP固件库开发点亮第一个灯。
12.FSP固件库开发按键输入检测控制LED灯闪烁
13.FSP固件库开发启动文件详解
14.FSP固件库开发延时函数(时钟详解)
15.FSP固件库外部中断处理编程(外部中断检测按键控制LED闪烁)
16.FSP固件库系统定时器(滴答定时器SysTick)每2秒LED闪烁一次
17.FSP固件库开发GPT — PWM通用定时器 定时2s LED 闪烁
18.FSP固件库开发GPT — PWM输出波形 — LED呼吸灯
19.RA2E1串口通信基础知识
文章目录
前言
一、串口通信是什么?
二、串口通信电平及方式
三、波特率
四、SCI 简介
五、串口通信:实操
1.硬件图:
2.新建工程
3.FSP配置
4.keil代码编写
总结
不努力谁也不知道结果。
前言
接上篇文章,串口的基础知识,今天实操串口通信:(8条消息) 【致敬未来的攻城狮计划】— 连续打卡第十九天:RA2E1串口通信基础知识_嵌入式up的博客-CSDN博客
串口通信例程
一、串口通信是什么?
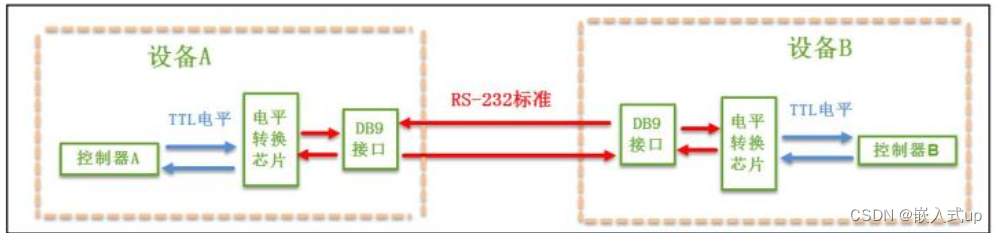
串口通信是一种常用的设备间通信方式,它通过串行传输方式将数据一位一位地发送或接收。在计算机科学中,通信协议可以通过分层来简化,通常分为物理层和协议层。物理层规定了通信系统中机械、电子功能部分的特性,确保原始数据在物理媒介上的传输。协议层则规定了通信逻辑,包括数据打包、解包标准,以确保通信的正确性和可靠性。电子工程师在调试设备时也经常使用串口通信方式输出调试信息。常见的串口通信标准包括RS-232、RS-422、RS-485等,它们在数据传输速率、距离、电平等方面有所不同。
二、串口通信电平及方式
- RXD:数据输入引脚,数据接受;
- TXD:数据发送引脚,数据发送。

通信两种方式:
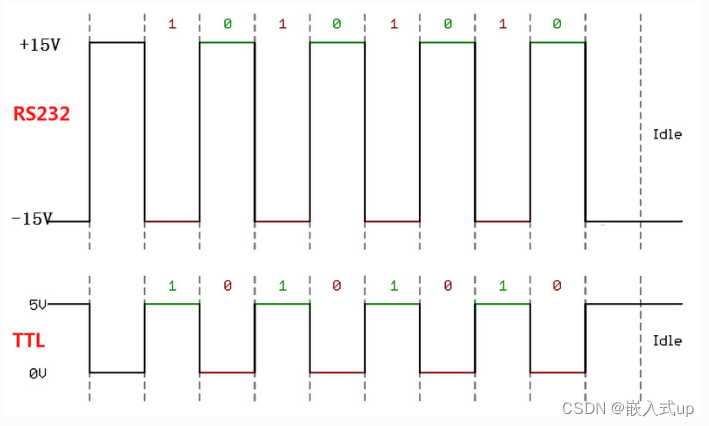
TTL
逻辑1:2.4V-5V
逻辑0:0~0.5V
RS-232
逻辑1:-15V~-3V
逻辑0:+3V~+15V
三、波特率
波特率,即每个码元的长度,以便对信号进行解码,常见的波特率为4800、9600、115200等。
详细介绍的话还有波特率发生器,等等好多知识,大家可以参考上篇文章,这篇文章不再赘述基础知识,实操关键。下面这篇文章也讲的很详细。
(8条消息) [攻城狮计划]RT-Thread—详解UART设备(基于RA2E1)_花园宝宝小点点的博客-CSDN博客
四、SCI 简介
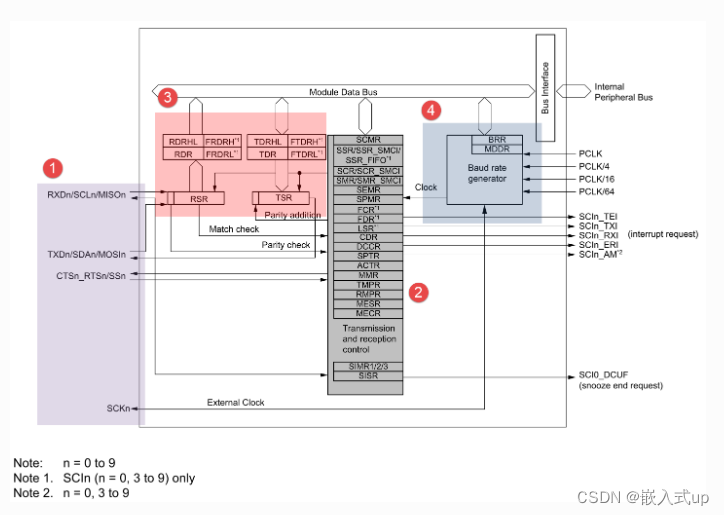
SCI(Serial Communications Interface),意为串行通信接口,是相对与并行通信的概念,是串行通信技术的一种总称。 包括了UART,SPI等串行通信技术。 RA6M5的SCI模块是一个有10个通道的异步/同步串行接口。 包含如下功能:
UART
8位时钟同步接口
简易IIC(只能用作主机)
简易SPI
智能卡接口(符合ISO/IEC 7816-3国际标准)
曼彻斯特接口
增强的串行接口
另外,SCI0、SCI3~SCI9有独立的FIFO缓冲区。
五、串口通信:实操
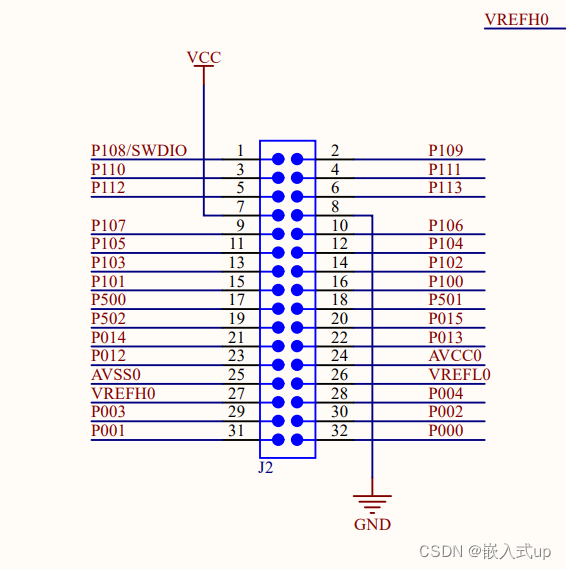
1.硬件图:
2.新建工程
拷贝一份我们之前的 Keil 工程模板 “RA_LED”, 然后将工程文件夹重命名为 “RA_UART”,并进入该文件夹里面双击 Keil 工程文件,打开该工程。


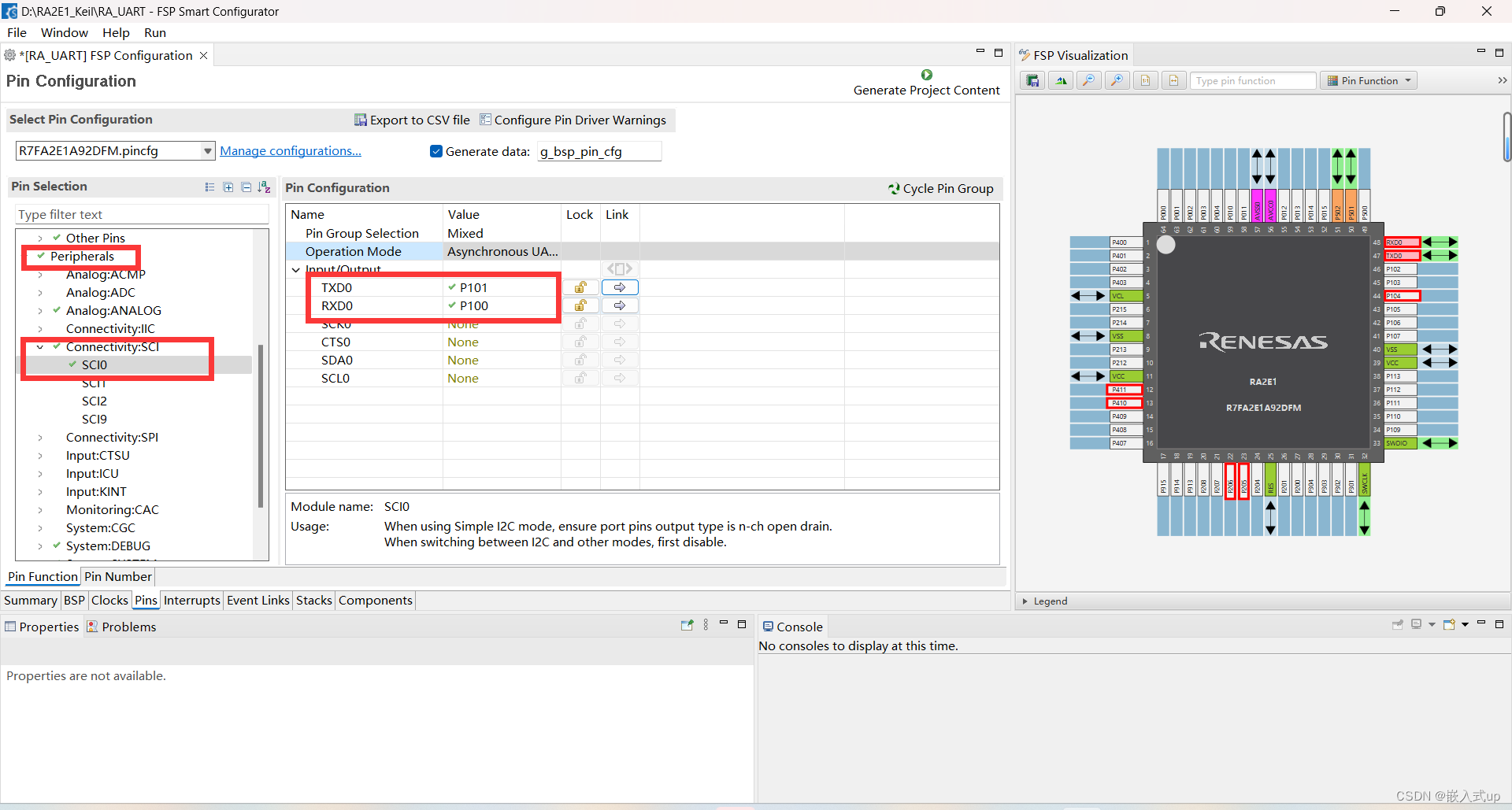
3.FSP配置
FSP 配置界面里面点开 “Pins”-> “Peripherals”-> “Connectivity:SCI”-> “SCI0” 来配置SCI模块, 配置为 “Asynchronous UART” 模式,并选择开发板使用串口引脚。
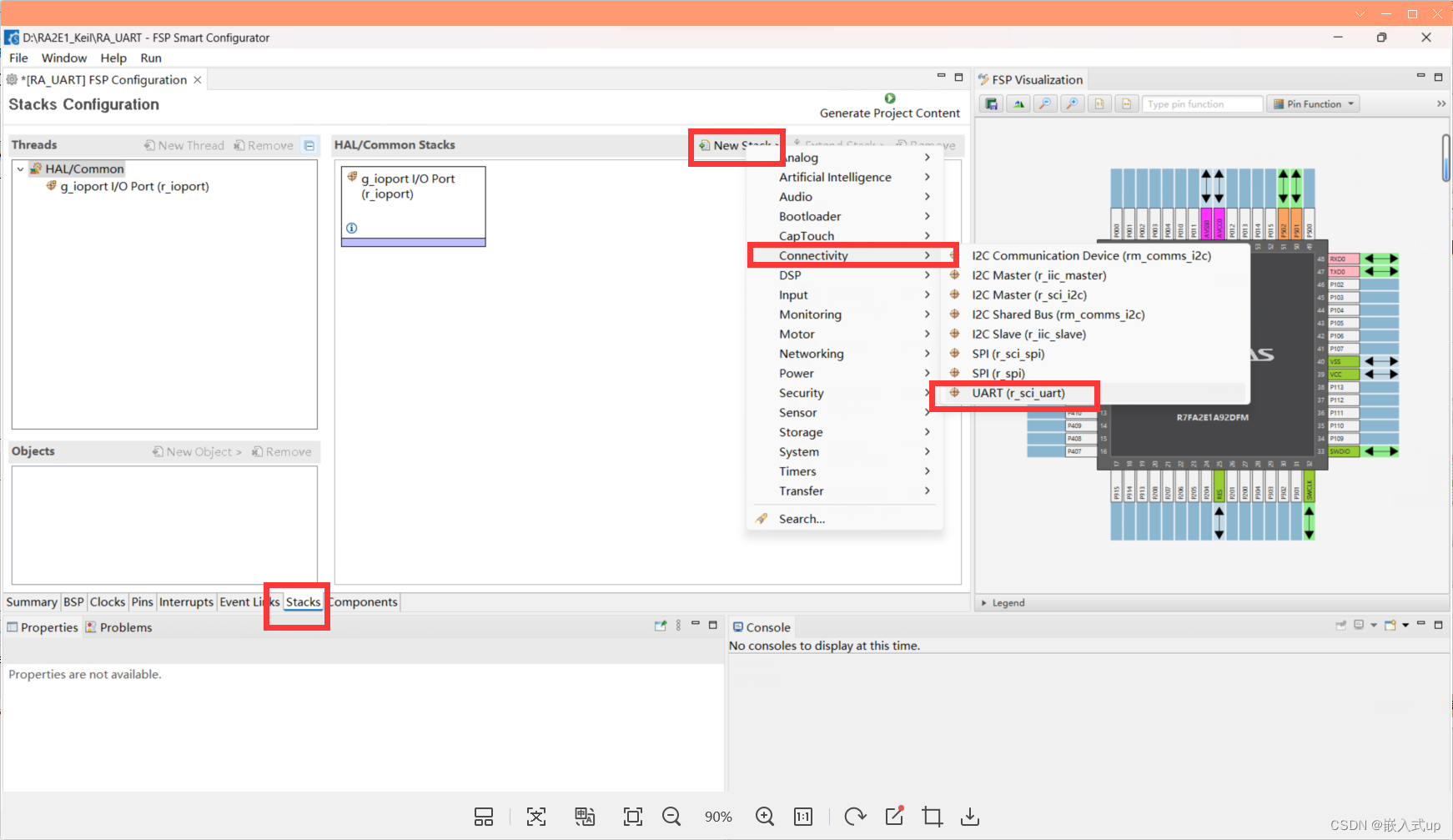
在配置界面底部点击 “Stack”,加入串口UART:
“属性”窗口中配置 名字(name)、通道(Channel)、回调函数(Callback)名字即可, 引脚(Pins)、波特率(Baud Rate)等其他的属性按照默认的配置即可。

串口属性设置解释:
属性
描述
Name
名字,根据读者需求设置即可。
Channel
通道,根据SCI号设置即可,例如实验使用SCI4,则这里配置为通道4。
Data Bits
每个字(word)的比特(bit)数,默认为8bits
Parity
校验模式,可选择“Odd”奇校验,“Even”偶校验或“None”无校验。
Stop Bits
停止位,可选1或2bit。
Baud Rate
波特率
Baud Rate Modulation
波特率调制,通过调整时钟周期,以减少申请波特率与实际波特率之间的误差。
Max Error(%)
计算波特率时允许的最大百分比误差。
Callback
回调函数的名字,根据读者需求设置即可。
Receive Interrupt Priority
接收中断优先级
Transmit Data Empty Interrupt Priority
发送数据空中断优先级
Transmit End Interrupt Priority
发送完成中断优先级
Error Interrupt Priority
错误中断优先级
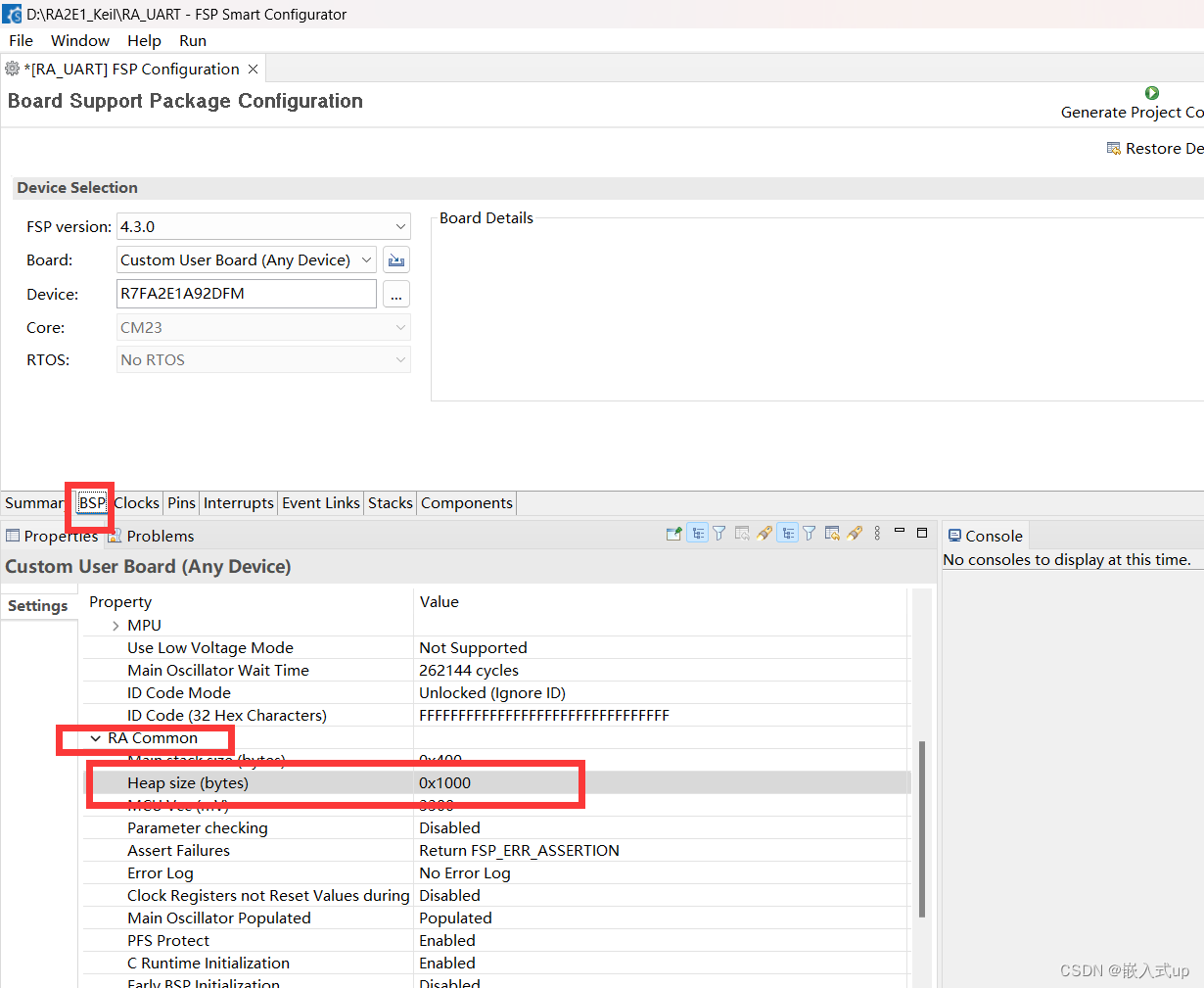
由于要使用Printf 函数:
使用 printf 函数时,需要使用到堆,默认情况下堆的大小为0,因此我们需要修改堆的大小。 可以在 FSP 配置界面中的“BSP”属性栏的“RA Common”中通过修改“Heap size”来设置堆区大小。 这里需要设置为 8 的整数倍,推荐至少为4K(0x1000)
点击 “Generate Project Content” 按钮,让软件自动生成配置代码。
4.keil代码编写
#include "hal_data.h"FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER/* 调试串口 UART0 初始化 */
void UART0_Init(void)
{fsp_err_t err = FSP_SUCCESS;err = R_SCI_UART_Open (&g_uart0_ctrl, &g_uart0_cfg);assert(FSP_SUCCESS == err);
}/* 发送完成标志 */
volatile bool uart_send_complete_flag = false;/* 串口中断回调 */
void uart0_callback (uart_callback_args_t * p_args)
{switch (p_args->event){case UART_EVENT_RX_CHAR:{/* 把串口接收到的数据发送回去 */R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&(p_args->data), 1);break;}case UART_EVENT_TX_COMPLETE:{uart_send_complete_flag = true;break;}default:break;}
}/*******************************************************************************************************************//*** main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function* is called by main() when no RTOS is used.**********************************************************************************************************************/
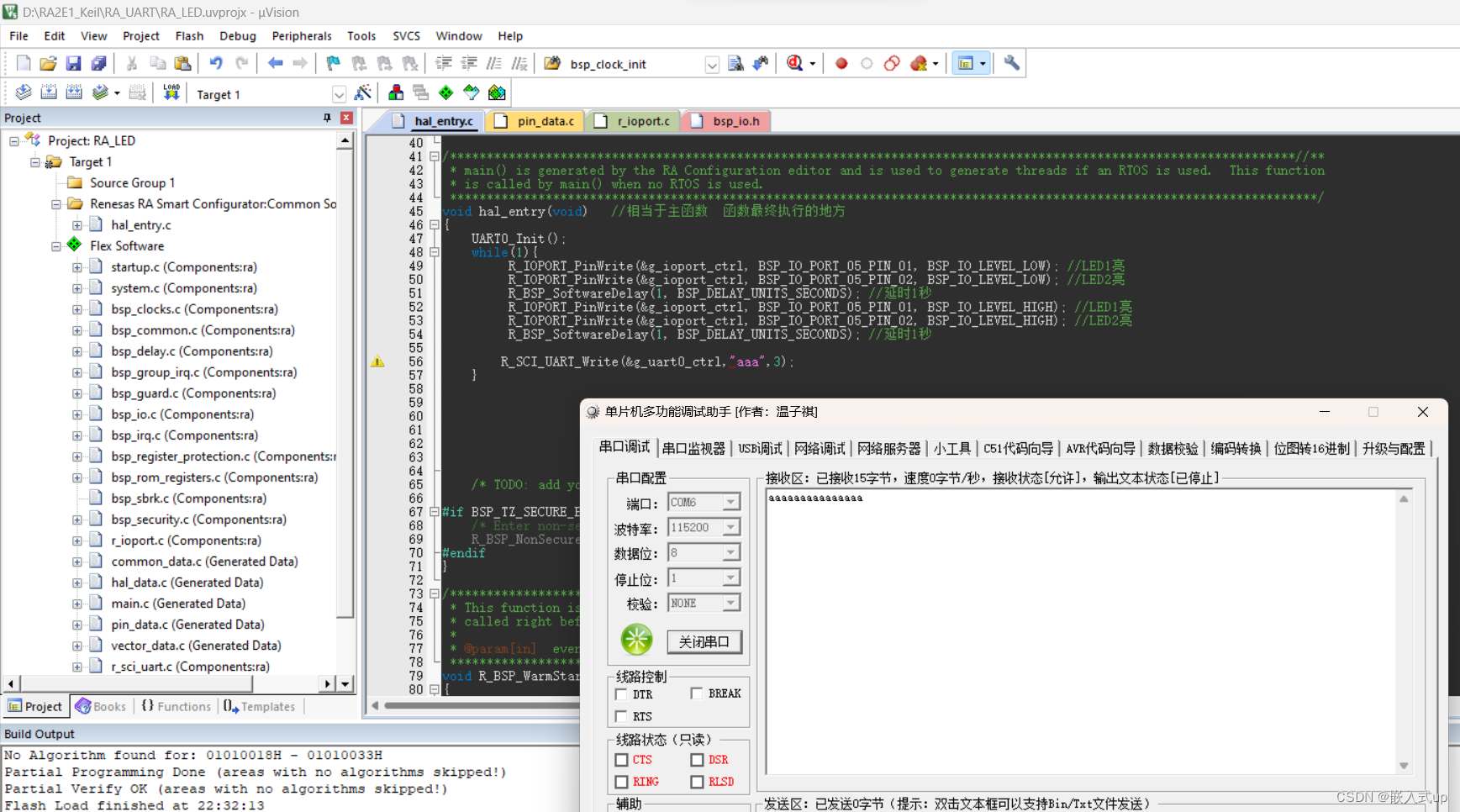
void hal_entry(void) //相当于主函数 函数最终执行的地方
{UART0_Init();while(1){R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_LOW); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_LOW); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_HIGH); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_HIGH); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒R_SCI_UART_Write(&g_uart0_ctrl,"aaa",3);}/* TODO: add your own code here */#if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();
#endif
}
烧写代码效果图:
由于习惯,我们更喜欢使用printf函数,所以我需要重定向:
#include "hal_data.h"
#include "stdio.h""FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER/* 调试串口 UART0 初始化 */
void UART0_Init(void)
{fsp_err_t err = FSP_SUCCESS;err = R_SCI_UART_Open (&g_uart0_ctrl, &g_uart0_cfg);assert(FSP_SUCCESS == err);
}/* 发送完成标志 */
volatile bool uart_send_complete_flag = false;/* 串口中断回调 */
void uart0_callback (uart_callback_args_t * p_args)
{switch (p_args->event){case UART_EVENT_RX_CHAR:{/* 把串口接收到的数据发送回去 */R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&(p_args->data), 1);break;}case UART_EVENT_TX_COMPLETE:{uart_send_complete_flag = true;break;}default:break;}
}/* 重定向 printf 输出 */
#if defined __GNUC__ && !defined __clang__
int _write(int fd, char *pBuffer, int size); //防止编译警告
int _write(int fd, char *pBuffer, int size)
{(void)fd;R_SCI_UART_Write(&g_uart4_ctrl, (uint8_t *)pBuffer, (uint32_t)size);while(uart_send_complete_flag == false);uart_send_complete_flag = false;return size;
}
#else
int fputc(int ch, FILE *f)
{(void)f;R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);while(uart_send_complete_flag == false);uart_send_complete_flag = false;return ch;
}
#endif/*******************************************************************************************************************//*** main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function* is called by main() when no RTOS is used.**********************************************************************************************************************/
void hal_entry(void) //相当于主函数 函数最终执行的地方
{UART0_Init();while(1){R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_LOW); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_LOW); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_HIGH); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_HIGH); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒printf("你好,程序员!\n");}/* TODO: add your own code here */#if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();
#endif
}视频效果:
RA2E1 开发板 串口通信测试
总结
串口通信一个新的高度,加油!!!
不努力谁也不知道结果。
这篇关于【致敬未来的攻城狮计划】— 连续打卡第二十天:RA2E1_UART —— 串口通信例程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








