本文主要是介绍Mind+积木编程控制小水泵给宠物喂水,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前期用scratch,带着小朋友做了大鱼吃小鱼、桌面弹球、小学生计算器3个作品,小朋友收获不小。关键是小家伙感兴趣,做出来后给家人炫耀了一圈后,兴趣大增,嚷嚷着要做更好玩的。
最近,娃妈从抖音上买了个小猫喝水的容器,一通电,水龙头就自动出水,猫咪就跑过来了。小朋友又发现了新大陆,摆弄起了开关,逗着猫咪。看到这,我心想这玩意能搞成自动化,跟scratch结合起来,正好又卡着小朋友的兴趣点,连玩带学,一箭双雕。

以上为背景。
因为上学的时候折腾过单片机,初步判定这个功能用单片机控制肯定是可行的,大概搜了下scratch这类少儿编程软件也支持单片机,所以整体方案可行,初步制定了功能如下:
- 基础功能:图形化编程,用积木控制,角色可以是小猫,运动来触发单片机
- 增强功能:如果孩子感兴趣,继续增加灯光控制,与水龙头联动
- 增强功能:如果孩子感兴趣,继续增加光电控制,用红外线或者声音触发水龙头开关
功能定义清楚后,然后就是寻找资料,分析技术可行性:
编程软件选型
上文提及了,孩子之前用的是Scratch,因为一些原因,Scratch在国内逐步被替换,可选的有如下:
- Kittenblock
- ClipCC
- Mind+
- PictoBlox
大概看了下,功能都差不多,基本与Scratch旗鼓相当,因为要连单片机,我主要关注扩展性,就选了Mind+,其实Kittenblock也差不多,先入为主就选了Mind+
官方网站:Mind+官网传送门
选择Mind+的另一个原因是,Mind+的开发者网站有大量电子积木的教程,与我的诉求匹配,无脑选了它了,
开发者网站:https://mindplus.dfrobot.com.cn/
扩展库选型
之所以要讨论这个,主要原因看Mind+教程,如果要控制单片机,无非就是usb口转串口,那么不得不用有线的方式连接单片机和控制设备。目前给小朋友编程用的是华为的平板,如果再连个usb线,恐怕小朋友会丧失玩下去的乐趣,所以要考虑无线连接,硬件方面(下个章节讨论)应该没问题,软件层面要支持无线连接的,从Mind+网站上看可以有python和nodejs两种,对应python和js两种语言,小朋友还没上小学,代码编程自然是不考虑的,所以要把上述两种语言“封装”到积木中,把涉及TCP数据包收发的逻辑的嵌入到积木中。显然js和python都可以胜任TCP收发任务。
在Mind+中,python扩展是包含在“Python”模式中的,每个积木对应着一段python代码,通过搭积木的方式组织代码。对于学龄前小朋友,这个可视化功能还是有点太深奥了,暂不考虑。另外,Python模式下,角色功能也不可用(猜测是python模式更偏代码逻辑,弱化了角色),而我家小朋友还处于启蒙阶段,没有了角色,兴趣也会大大减弱。
在Mind+中,nodejs扩展是集成到“实时”模式中的,实时模式就是普通的模式,包含了场景和角色,和我的诉求很贴合。从官方的说明,nodejs类里面可以扩展实时模式用户库,库里面可以构造一个或者多个block,可以自定义block的外观,以及自定义block的运行逻辑。
Mind+从V1.6.5开始开放 实时模式用户库,内部兼容 Scratch扩展语法,,本文档将介绍如何开发Mind+实时模式用户库,阅读此文档需要你掌握 JavaScript的基础知识以及了解一些ES6的新特性。
如果你在阅读过程中产生疑惑, 请加入官方交流群(671877416)。
在开发之前, 你需要知道 能做出什么东西.
添加不依赖硬件的模块 可以很方便的使用第三方JS库
为mind+中已有的主板/套件增加硬件小模块
添加自己的硬件套件并通信
从上述官方教程引用看,实时模式用户库完全符合我的诉求,就选它了。
硬件选型
因为喝水的容器已经小水泵已经有了,如下图:

那么剩下的就是买单片机、电机驱动板、LED灯,以及必要的连接线了,Mind+官方支持Arduino,ESP32,ESP8266,这些都是市面上很常见的,

从节约成本的角度,就选ESP32了,其他的随便买。

元件列表
以下开始教程:
硬件连接
马云家买的元件,购买链接怎么连硬件基本说的很清楚了,需要注意的就是注意电压及正负极,别烧板子了。
如下 图:

ESP32固件:
基于Arduino的示例代码,简单改下即可,注释不多,凑合看,不复杂。
定义了3个gpio口
5 --输出口,连电机驱动板,用于控制小水泵的启动/停止
17 --输出口,直接连一个小LED灯
16 --输入口,连红外传感器,用于控制电机的启动/停止
代码运行逻辑为:水泵受两个管脚的控制,一个是来自上位机(Mind+)的指令,一个是红外传感器,红外传感器的优先级高于上位机指令,实现的效果就是小猫靠近,水龙头打开;小猫离开,水龙头由上位机控制。
/*WiFi Web Server LED/Motor Control*/#include <WiFi.h>const char* ssid = "xxxxx";
const char* password = "xxxxx";
const int MOTOR = 5;
const int LIGHT = 17;
const int NEAR = 16;WiFiServer server(80);void setup()
{Serial.begin(115200);pinMode(MOTOR, OUTPUT); pinMode(LIGHT, OUTPUT); pinMode(NEAR, INPUT); delay(10);// We start by connecting to a WiFi networkSerial.println();Serial.println();Serial.print("Connecting to ");Serial.println(ssid);WiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}Serial.println("");Serial.println("WiFi connected.");Serial.println("IP address: ");Serial.println(WiFi.localIP());server.begin();}int lastValue = LOW;void loop(){int state = digitalRead(NEAR);if (state != lastValue ) {lastValue = state;if (state == HIGH){Serial.println("receive near signal: HIGH");digitalWrite(MOTOR, HIGH);return;} else {Serial.println("receive near signal: LOW");digitalWrite(MOTOR, LOW);}}sleep(1);WiFiClient client = server.available(); // listen for incoming clientsSerial.println("server created, wating ..."); if (client) { // if you get a client,Serial.println("New Client."); // print a message out the serial portString currentLine = ""; // make a String to hold incoming data from the clientwhile (client.connected()) { // loop while the client's connectedif (client.available()) { // if there's bytes to read from the client,char c = client.read(); // read a byte, then//Serial.write(c); // print it out the serial monitorif (c == '\n') { // if the byte is a newline characterif (currentLine.startsWith("motoron")) {digitalWrite(MOTOR, HIGH); // GET /H turns the LED on}if (currentLine.startsWith("motoroff")) {digitalWrite(MOTOR, LOW); // GET /L turns the LED off}if (currentLine.startsWith("lightoff")) {digitalWrite(LIGHT, LOW); // GET /L turns the LED off}if (currentLine.startsWith("lighton")) {digitalWrite(LIGHT, HIGH); // GET /L turns the LED off}Serial.println("receive msg:" + currentLine); currentLine = "";break;} else if (c != '\r') { // if you got anything else but a carriage return character,currentLine += c; // add it to the end of the currentLine}// Check to see if the client request was "GET /H" or "GET /L":}}// close the connection:client.stop();Serial.println("Client Disconnected.");}
}代码写完后,上传到ESP32中(教程很多,不展开说明了),可以通过网络调试助手这类工具,发送“motoron”等指令,确保ESP工作正常。
Nodejs Block定义
Nodejs中定义两个Block,分别控制LED灯和水泵的开关,并且定义两个控制函数(motor和light),分别控制LED和水泵的运行逻辑,不复杂,直接上代码了。
import ArgumentType from './extension-support/argument-type';
import BlockType from './extension-support/block-type';
import blockIconURI from './image/icon.svg';class YourExtension{constructor(runtime) {this.runtime = runtime;}getInfo () {const operator_values = [["打开","1"],["关闭","0"]];return {name: '小猫喝水',blockIconURI: blockIconURI,blocks: [{ opcode: 'motor',blockType: BlockType.COMMAND,text: ' [OPERATOR] 小猫喝水的龙头 ',arguments: {OPERATOR: {type: ArgumentType.STRING,onlyField: true,options: operator_values,defaultValue: operator_values[1][1]}}},{ opcode: 'light',blockType: BlockType.COMMAND,text: ' [OPERATOR] 水龙头的灯泡 ',arguments: {OPERATOR: {type: ArgumentType.STRING,onlyField: true,options: operator_values,defaultValue: operator_values[1][1]}}},],}}// block运行函数, 与opcode同名motor (args) {// NUM1与NUM2参数都是'ArgumentType.STRING'类型, 所以要parseInt解析成numbervar msg = '';switch (args.OPERATOR){case "1":msg = "motoron\n";break;case "0":msg = "motoroff\n";break;default:msg = "motoroff\n";break;}const net = require("net");const HOST = "192.168.5.130";const PORT = 80;const client = new net.Socket();client.connect(PORT, HOST, function() {//客户端向服务端socket发送数据client.write(msg);});}light (args) {// NUM1与NUM2参数都是'ArgumentType.STRING'类型, 所以要parseInt解析成numbervar msg = '';switch (args.OPERATOR){case "1":msg = "lighton\n";break;case "0":msg = "lightoff\n";break;default:msg = "lightoff\n";break;}const net = require("net");const HOST = "192.168.5.130";const PORT = 80;const client = new net.Socket();client.connect(PORT, HOST, function() {//客户端向服务端socket发送数据client.write(msg);});}
}
module.exports = YourExtension;
其中:
const HOST="192.168.5.130";要改成ESP在局域网下的真实IP地址,可以通过ESP上电后控制台打印的log查看。
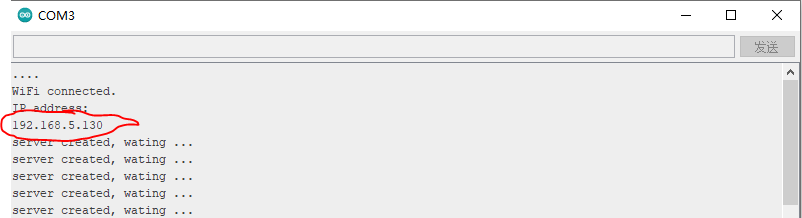
ESP log
在代码目录下执行npm run build,确保编译成功
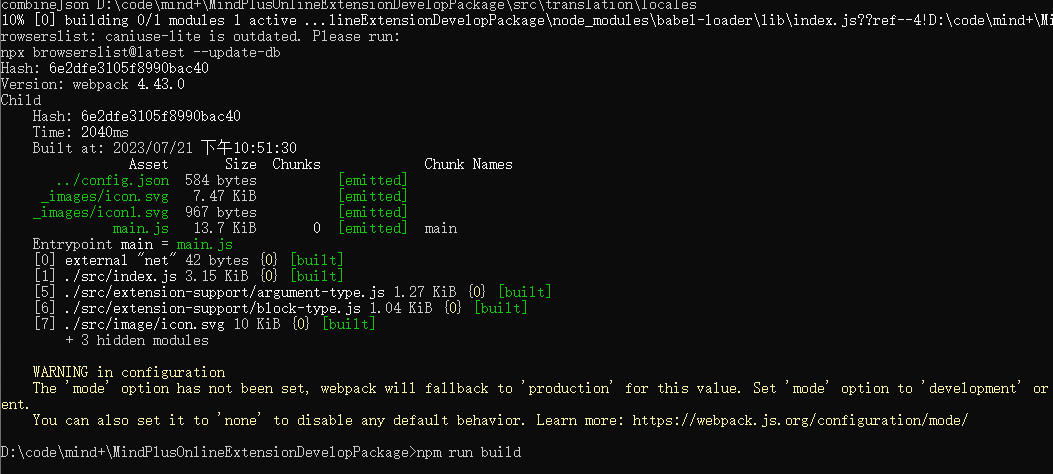
npm build
Mind+操作步骤
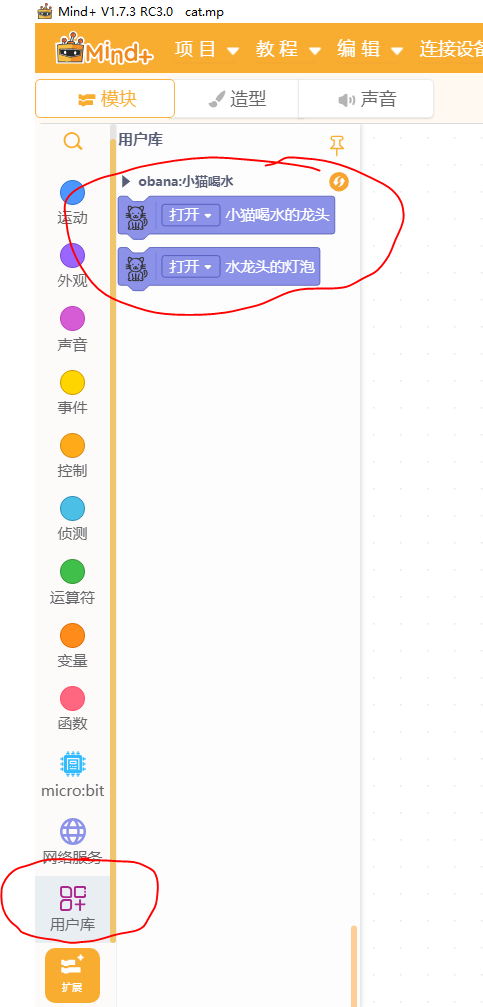
在上述nodejs编译成功后,在Mind+中添加用户库,具体教程参考,也不展开讲了。
https://mindplus.dfrobot.com.cn/ext-js
注意,官方教程有个坑,nodejs的版本不能用最新的,建议用14.16.0版本,配套的Mind+版本是1.7.3,笔者用这两个版本配合没有问题,用最新的nodejs就出怪异问题。
按官方教程操作,编译,添加扩展后,最终,在Mind+实时模式下,可以看到如下两个用户自定义Block
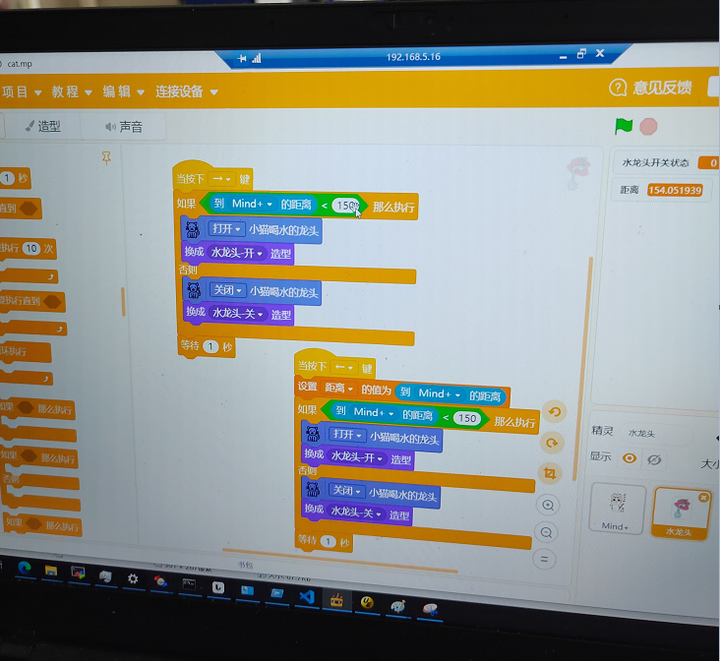
写了两份示例代码,当然,这个大家就可以发挥想象力了,没有固定的模板。
案例一:用空格键切换水泵的开启/关闭状态

案例2:用角色移动,控制水泵的开启/关闭
硬件也简单整理下,看上去像是一个具有实用价值的工具兼玩具。
运行效果视频
积木运行效果
教程结束,enjoy!
这篇关于Mind+积木编程控制小水泵给宠物喂水的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






