本文主要是介绍【Camera专题】Qcom-Camera驱动框架浅析(Hal层->Driver层),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【Camera专题】Qcom-Camera驱动框架浅析(Hal层->Driver层)
c枫_撸码的日子关注
0.7612019.01.23 10:46:11字数 1,423阅读 4,109
1、前言
本文主要研究高通平台Camera驱动和HAL层代码架构,熟悉高通Camera的控制流程。
平台:Qcom-高通平台
Hal版本:【HAL1】
知识点如下:
从HAL层到driver层:研究Camera以下内容
1.打开(open)流程
2.预览(preview)流程
3.拍照(tackPicture)流程
2、Camera软件架构
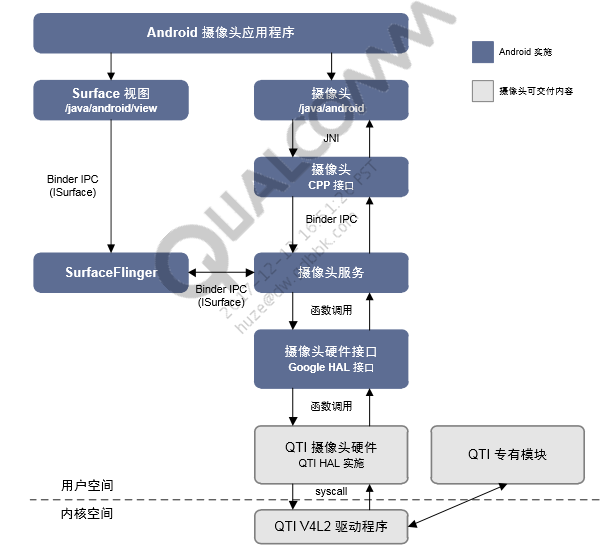
camera软件架构
由上图可以看出,Android Camera 框架是 client/service 的架构,
-
1.有两个进程:
client 进程:可以看成是 AP 端,主要包括 JAVA 代码与一些 native c/c++代码;
service 进 程:”属于服务端,是 native c/c++代码,主要负责和 linux kernel 中的 camera driver 交互,搜集 linuxkernel 中 cameradriver 传上来的数据,并交给显示系统SurfaceFlinger显示。
client 进程与 service 进程通过 Binder 机制通信, client 端通过调用 service 端的接口实现各个具体的功能。
-
2.最下面的是kernel层的驱动,其中按照V4L2架构实现了camera sensor等驱动,向用户空间提供/dev/video0节点,这些设备节点文件,把操作设备的接口暴露给用户空间。
-
3.在往上是HAL层,高通代码实现了对/dev/video0的基本操作,对接了android的camera相关的interface。
2.1 Camera的open流程
2.1.1 Hal层
Android中Camera的调用流程, 基本是 Java -> JNI -> Service -> HAL -> 驱动层。
frameworks/av/services/camera/libcameraservice/device1/CameraHardwareInterface.h
status_t initialize(CameraModule *module) {
···rc = module->open(mName.string(), (hw_device_t **)&mDevice);
···
}
这里调用module->open开始调用到HAL层,那调用的是哪个方法呢?
我们继续往下看:
hardware/qcom/camera/QCamera2/HAL/wrapper/QualcommCamera.cpp
static hw_module_methods_t camera_module_methods = {open: camera_device_open,
};
实际上是调用了camera_device_open函数,为了对调用流程更加清晰的认识,
我画了一张流程图(画图工具:processon):
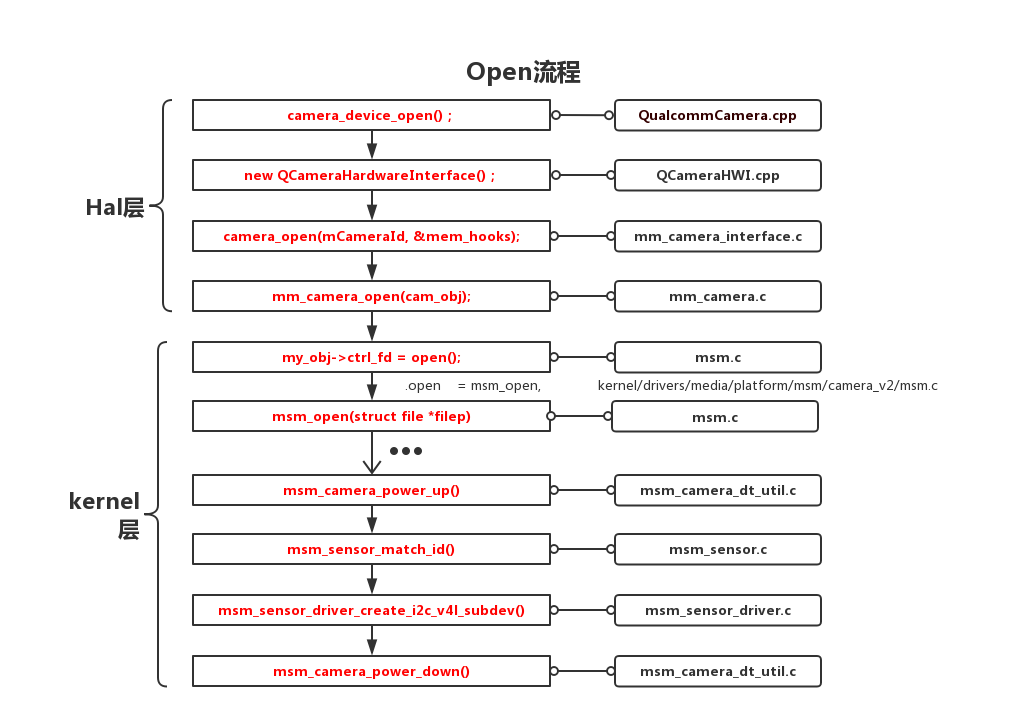
open流程
open流程图已经很清晰明了,我们关注一些重点函数:
在HAL层的 module->open(mName.string(), (hw_device_t **)&mDevice)层层调用,最终会调用到函数mm_camera_open(cam_obj);
hardware/qcom/camera/QCamera2/HAL/core/src/QCameraHWI.cpp
QCameraHardwareInterface::QCameraHardwareInterface(int cameraId, int mode)
{
···
/* Open camera stack! */mCameraHandle=camera_open(mCameraId, &mem_hooks);//Previewresult = createPreview();//Recordresult = createRecord();//Snapshotresult = createSnapshot();/* launch jpeg notify thread and raw data proc thread */mNotifyTh = new QCameraCmdThread();mDataProcTh = new QCameraCmdThread();
···
}
分析:new QCameraHardwareInterface()进行初始化:主要做了以下动作:
- 1.打开camera
- 2.creat preview stream、record stream、snapshot stream
- 3.创建2个线程(jpeg notify thread和raw data proc thread)
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera.c
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{
···my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
···}
在V4L2框架中,Camera被看做一个视频设备,使用open函数打开这个设备:这里以阻塞模式打开Camera。
1. 用非阻塞模式打开摄像头设备cameraFd = open("/dev/video0", O_RDWR | O_NONBLOCK);2. 如果用阻塞模式打开摄像头设备,上述代码变为:cameraFd = open("/dev/video0", O_RDWR);ps:关于阻塞模式和非阻塞模式应用程序能够使用阻塞模式或非阻塞模式打开视频设备,如果使用非阻塞模式调用视频设备,
即使尚未捕获到信息,驱动依旧会把缓存(DQBUFF)里的东西返回给应用程序。
那么,接下来就会调用到Kernel层的代码
2.1.2Kernel层
kernel/drivers/media/platform/msm/camera_v2/msm.c
static struct v4l2_file_operations msm_fops = {.owner = THIS_MODULE,.open = msm_open,.poll = msm_poll,.release = msm_close,.ioctl = video_ioctl2,
#ifdef CONFIG_COMPAT.compat_ioctl32 = video_ioctl2,
#endif
};
实际上是调用了msm_open这个函数,我们跟进去看:
static int msm_open(struct file *filep)
{
···/* !!! only ONE open is allowed !!! */if (atomic_cmpxchg(&pvdev->opened, 0, 1))return -EBUSY;spin_lock_irqsave(&msm_pid_lock, flags);msm_pid = get_pid(task_pid(current));spin_unlock_irqrestore(&msm_pid_lock, flags);/* create event queue */rc = v4l2_fh_open(filep);if (rc < 0)return rc;spin_lock_irqsave(&msm_eventq_lock, flags);msm_eventq = filep->private_data;spin_unlock_irqrestore(&msm_eventq_lock, flags);/* register msm_v4l2_pm_qos_request */msm_pm_qos_add_request();
···
}
分析:
通过调用v4l2_fh_open函数打开Camera,该函数会创建event队列等进行一些其他操作。
接下来我们跟着log去看:
camera open log
<3>[ 12.526811] msm_camera_power_up type 1
<3>[ 12.526818] msm_camera_power_up:1303 gpio set val 33
<3>[ 12.528873] msm_camera_power_up index 6
<3>[ 12.528885] msm_camera_power_up type 1
<3>[ 12.528893] msm_camera_power_up:1303 gpio set val 33
<3>[ 12.534954] msm_camera_power_up index 7
<3>[ 12.534969] msm_camera_power_up type 1
<3>[ 12.534977] msm_camera_power_up:1303 gpio set val 28
<3>[ 12.540162] msm_camera_power_up index 8
<3>[ 12.540177] msm_camera_power_up type 1
<3>[ ·
<3>[ ·
<3>[ ·
<3>[ 12.562753] msm_sensor_match_id: read id: 0x5675 expected id 0x5675:
<3>[ 12.562763] ov5675_back probe succeeded
<3>[ 12.562771] msm_sensor_driver_create_i2c_v4l_subdev camera I2c probe succeeded
<3>[ 12.564930] msm_sensor_driver_create_i2c_v4l_subdev rc 0 session_id 1
<3>[ 12.565495] msm_sensor_driver_create_i2c_v4l_subdev:120
<3>[ 12.565507] msm_camera_power_down:1455
<3>[ 12.565514] msm_camera_power_down index 0
分析:
最终就是调用msm_camera_power_up上电,msm_sensor_match_id识别sensor id,调用ov5675_back probe()探测函数去完成匹配设备和驱动的工作,msm_camera_power_down下电!
到此 我们的open流程就结束了!!!
2.2 Camera的preview流程
2.2.1 Hal层
hardware/qcom/camera/QCamera2/HAL/QCamera2HWI.cpp
int QCamera2HardwareInterface::startPreview()
{
···int32_t rc = NO_ERROR;
···rc = startChannel(QCAMERA_CH_TYPE_PREVIEW);
···
}
这里调用startChannel(QCAMERA_CH_TYPE_PREVIEW),开启preview流。
接来下看我画的一张流程图:(Hal层)

Preview流程
关注一些重点函数:
hardware/qcom/camera/QCamera2/HAL/QCameraChannel.cpp
int32_t QCameraChannel::start()
{
···mStreams[i]->start();//流程1
···rc = m_camOps->start_channel(m_camHandle, m_handle);//流程2
···
}
进入QCameraChannel::start()函数开始执行两个流程,分别是
mStreams[i]->start()和m_camOps->start_channel(m_camHandle, m_handle);
流程1:mStreams[i]->start()
1.通过mProcTh.launch(dataProcRoutine, this)开启新线程
2.执行CAMERA_CMD_TYPE_DO_NEXT_JOB分支,
3.从mDataQ队列中取出数据并放入mDataCB中,等待数据返回到对应的stream回调中去,
4.最后向kernel请求数据;
流程2:m_camOps->start_channel(m_camHandle, m_handle);
通过流程图,我们可以清晰的看到,经过一系列复杂的调用用,
最后在mm_camera_channel.c中
调用mm_channel_start(mm_channel_t *my_obj)函数,
来看mm_channel_start做了什么事情:
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_start(mm_channel_t *my_obj)
{
···/* 需要发送cb,因此启动线程 *//* 初始化superbuf队列 */mm_channel_superbuf_queue_init(&my_obj->bundle.superbuf_queue);/* 启动cb线程,通过cb调度superbuf中 */snprintf(my_obj->cb_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBuf");mm_camera_cmd_thread_launch(&my_obj->cb_thread,mm_channel_dispatch_super_buf,(void*)my_obj);/* 启动 cmd 线程,作为superbuf接收数据的回调函数*/snprintf(my_obj->cmd_thread.threadName, THREAD_NAME_SIZE, "CAM_SuperBufCB");mm_camera_cmd_thread_launch(&my_obj->cmd_thread,mm_channel_process_stream_buf,(void*)my_obj);/* 为每个strean分配 buf *//*allocate buf*/rc = mm_stream_fsm_fn(s_objs[i],MM_STREAM_EVT_GET_BUF,NULL,NULL);/* reg buf */rc = mm_stream_fsm_fn(s_objs[i],MM_STREAM_EVT_REG_BUF,NULL,NULL);/* 开启 stream */rc = mm_stream_fsm_fn(s_objs[i],MM_STREAM_EVT_START,NULL,NULL);
···
}
过程包括:
- 1.创建cb thread,cmd thread线程以及
- 2.为每个stream分配buf
- 3.开启stream;
我们继续关注开启stream后的流程:
rc = mm_stream_fsm_fn(s_objs[i],MM_STREAM_EVT_START,NULL,NULL);
调用到
rc = mm_stream_fsm_reg(my_obj, evt, in_val, out_val)
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_stream.c
int32_t mm_stream_fsm_reg(···)
{
···case MM_STREAM_EVT_START:rc = mm_stream_streamon(my_obj);
···
}
在mm_camera_stream.c中调用mm_stream_streamon(mm_stream_t *my_obj)函数.
向kernel发送v4l2请求,等待数据回调
int32_t mm_stream_streamon(mm_stream_t *my_obj)
{
···enum v4l2_buf_type buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
···rc = ioctl(my_obj->fd, VIDIOC_STREAMON, &buf_type);
···
}
2.2.2 Kernel层
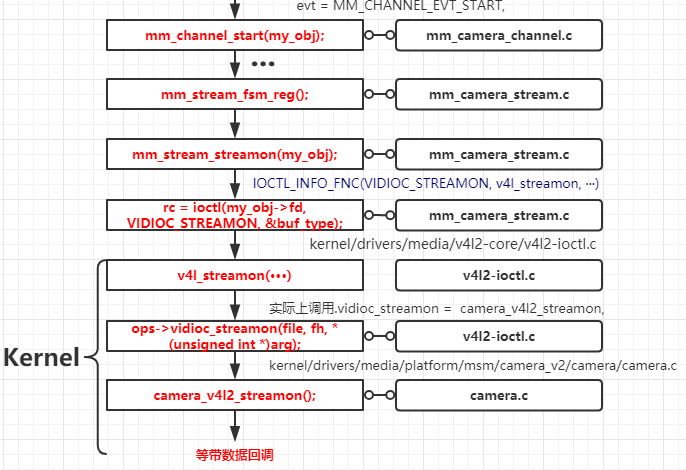
image
kernel/drivers/media/platform/msm/camera_v2/camera/camera.c
通过ioctl的方式,经过层层调用,最后调用到camera_v4l2_streamon();
static int camera_v4l2_streamon(struct file *filep, void *fh,enum v4l2_buf_type buf_type)
{struct v4l2_event event;int rc; struct camera_v4l2_private *sp = fh_to_private(fh);rc = vb2_streamon(&sp->vb2_q, buf_type);camera_pack_event(filep, MSM_CAMERA_SET_PARM,MSM_CAMERA_PRIV_STREAM_ON, -1, &event);rc = msm_post_event(&event, MSM_POST_EVT_TIMEOUT);
···rc = camera_check_event_status(&event);return rc;
}
分析:通过msm_post_event发生数据请求,等待数据回调。
Preview完整流程图

Preview完整流程图
到此,preview预览流程结束
2.3 Camera的takePicture流程
事实上,tackPicture流程和preview的流程很类似!
以ZSL模式(零延迟模式)为切入点:
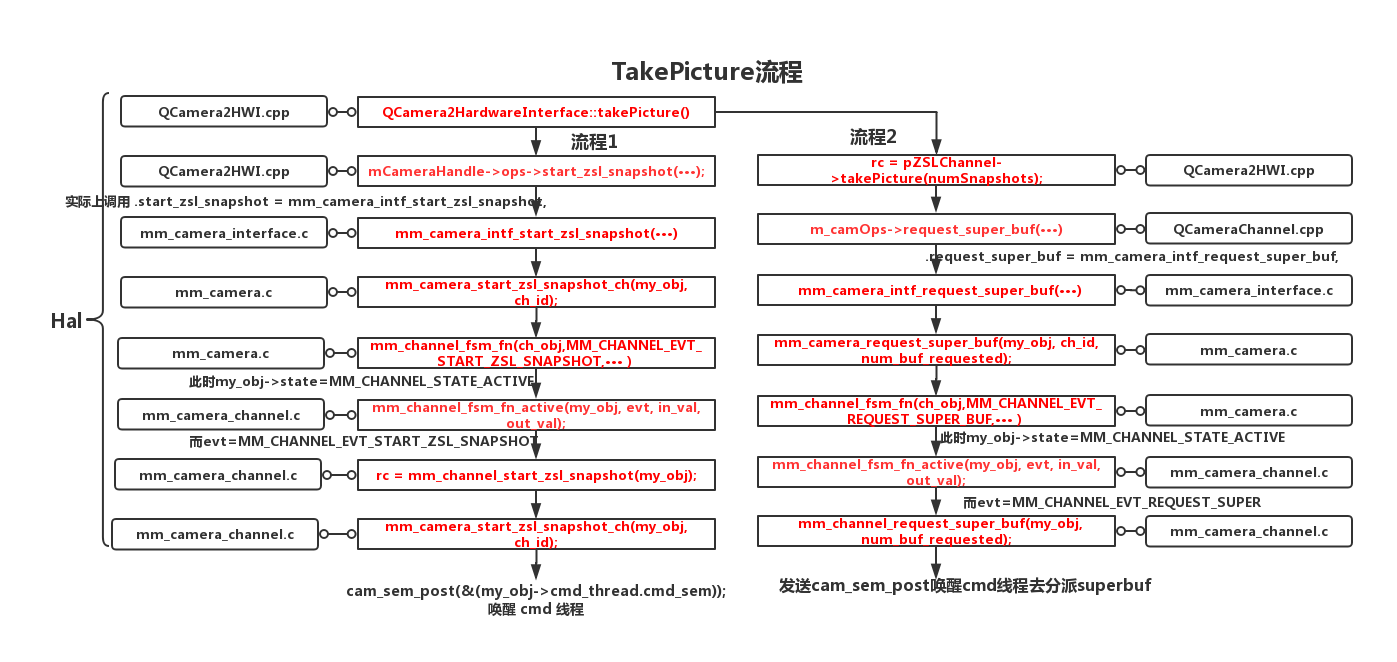
2.3.1 Hal层
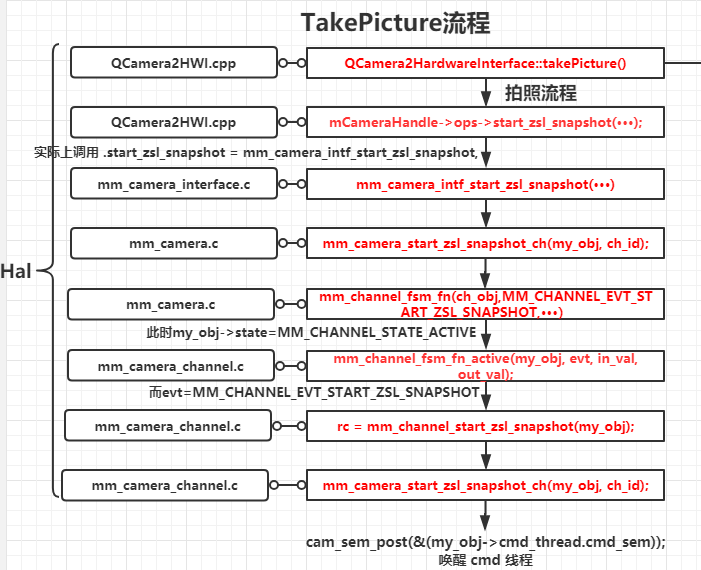
hardware/qcom/camera/QCamera2/HAL/QCamera2HWI.cpp
int QCamera2HardwareInterface::takePicture()
{
···//流程1mCameraHandle->ops->start_zsl_snapshot(mCameraHandle->camera_handle, pZSLChannel->getMyHandle());
···//流程2rc = pZSLChannel->takePicture(numSnapshots);
···
}进入QCamera2HardwareInterface::takePicture后,会走2个流程:
-
1.mCameraHandle->ops->start_zsl_snapshot(···);
-
2.pZSLChannel->takePicture(numSnapshots);
流程1:
image
经过层层调用,最终会调用到mm_channel_start_zsl_snapshot
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_start_zsl_snapshot(mm_channel_t *my_obj)
{int32_t rc = 0; mm_camera_cmdcb_t* node = NULL;node = (mm_camera_cmdcb_t *)malloc(sizeof(mm_camera_cmdcb_t));if (NULL != node) {memset(node, 0, sizeof(mm_camera_cmdcb_t));node->cmd_type = MM_CAMERA_CMD_TYPE_START_ZSL;/* enqueue to cmd thread */cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);/* wake up cmd thread */cam_sem_post(&(my_obj->cmd_thread.cmd_sem));} else {CDBG_ERROR("%s: No memory for mm_camera_node_t", __func__);rc = -1;}return rc;
}分析:
该函数主要做了2件事情:
- 1 cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);入队
- 2 通过cam_sem_post(&(my_obj->cmd_thread.cmd_sem));唤醒cmd线程
这里的node->cmd_type=MM_CAMERA_CMD_TYPE_START_ZSL
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_thread.c
static void *mm_camera_cmd_thread(void *data)
{
···case MM_CAMERA_CMD_TYPE_START_ZSL:cmd_thread->cb(node, cmd_thread->user_data);
···
}
这里cmd_thread->cb是回调函数:
cmd_thread->cb = mm_channel_process_stream_buf,经过层层复杂的回调
最终:
mm_channel_superbuf_skip(ch_obj, &ch_obj->bundle.superbuf_queue);
super_buf = (mm_channel_queue_node_t*)node->data;
将buffer 取出 且释放list中的node,最终将buffer queue给kernel进行下一次填充.
流程2:
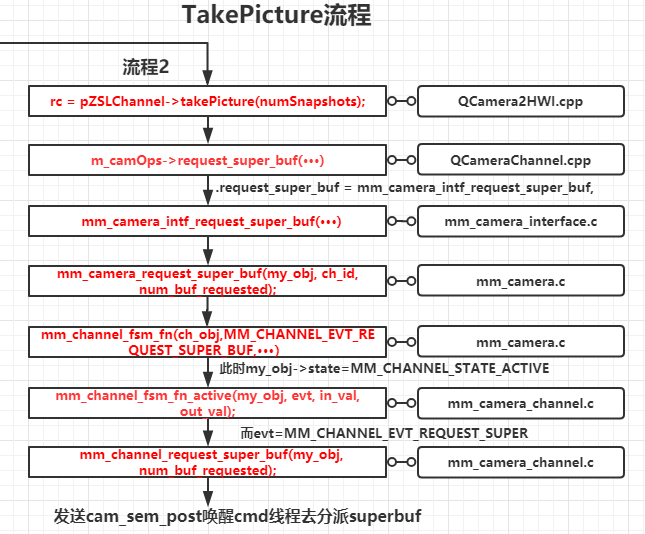
image
同样,经过层层调用,最终调用到mm_channel_request_super_buf
hardware/qcom/camera/QCamera2/stack/mm-camera-interface/src/mm_camera_channel.c
int32_t mm_channel_request_super_buf(mm_channel_t *my_obj, uint32_t num_buf_requested)
{/* set pending_cnt* will trigger dispatching super frames if pending_cnt > 0 *//* send cam_sem_post to wake up cmd thread to dispatch super buffer */node = (mm_camera_cmdcb_t *)malloc(sizeof(mm_camera_cmdcb_t));if (NULL != node) {memset(node, 0, sizeof(mm_camera_cmdcb_t));node->cmd_type = MM_CAMERA_CMD_TYPE_REQ_DATA_CB;node->u.req_buf.num_buf_requested = num_buf_requested;/* enqueue to cmd thread */cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);/* wake up cmd thread */cam_sem_post(&(my_obj->cmd_thread.cmd_sem));} else {CDBG_ERROR("%s: No memory for mm_camera_node_t", __func__);rc = -1;}return rc;
}
分析:该函数和流程1一样:
- 1 cam_queue_enq(&(my_obj->cmd_thread.cmd_queue), node);入队
- 2 通过cam_sem_post(&(my_obj->cmd_thread.cmd_sem));唤醒cmd线程
static void *mm_camera_cmd_thread(void *data)
{
···case MM_CAMERA_CMD_TYPE_START_ZSL:case MM_CAMERA_CMD_TYPE_REQ_DATA_CB:cmd_thread->cb(node, cmd_thread->user_data);
···
}
这里和流程1一样,就不再赘述!
2.3.2 Kernel层
int32_t mm_camera_start_zsl_snapshot(mm_camera_obj_t *my_obj)
{
···rc = mm_camera_util_s_ctrl(my_obj->ctrl_fd,CAM_PRIV_START_ZSL_SNAPSHOT, &value);
···
}
int32_t mm_camera_util_s_ctrl(int32_t fd, uint32_t id, int32_t *value)
{
···rc = ioctl(fd, VIDIOC_S_CTRL, &control);
···
}
kernel/drivers/media/v4l2-core/v4l2-subdev.c
static long subdev_do_ioctl(struct file *file, unsigned int cmd, void *arg)
{
···case VIDIOC_S_CTRL:return v4l2_s_ctrl(vfh, vfh->ctrl_handler, arg);
···
}
通过ioctl(fd, VIDIOC_S_CTRL, &control)的方式,借助V4L2框架,调用到kernel层,
最终buffer queue给kernel进行下一次填充。
takePicture完整流程图
takePicture完整流程图
这篇关于【Camera专题】Qcom-Camera驱动框架浅析(Hal层->Driver层)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






