本文主要是介绍POJ1835 宇航员(模拟),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目:
| 宇航员
Description 问题描述: 宇航员在太空中迷失了方向,在他的起始位置现在建立一个虚拟xyz坐标系,称为绝对坐标系,宇航员正面的方向为x轴正方向,头顶方向为z轴正方向,则宇航员的初始状态如下图所示: 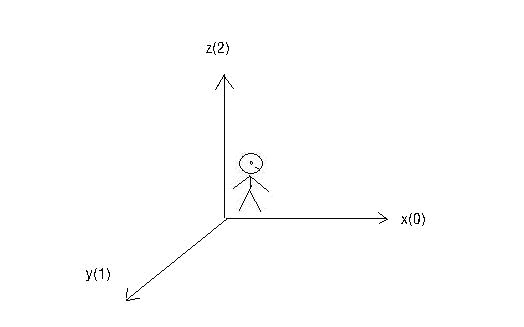 现对六个方向分别标号,x,y,z正方向分别为0,1,2,负方向分别为3,4,5;称它们为绝对方向。宇航员在宇宙中只沿着与绝对坐标系xyz轴平行的方向行走,但是他不知道自己当前绝对坐标和自己面向的绝对方向。 任务描述: 请根据宇航员对自己在相对方向上移动的描述确定宇航员最终的绝对坐标和面向的绝对方向。对在相对方向上移动的描述及意义如下: forward x 向前走x米。 back x 先转向后,再走x米。 left x 先转向左,再走x米。 right x 先转向右,再走x米。 up x 先面向上,再走x米。 down x 先面向下,再走x米。 其中向上和向下如下图所示: 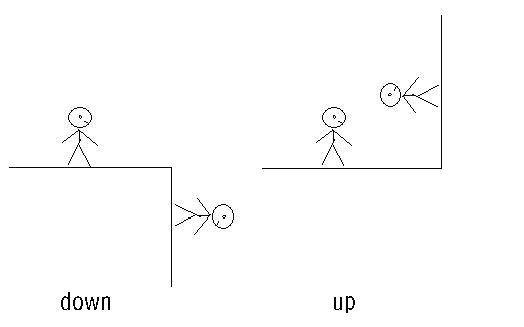 Input 第一行一个正整数m,表示测试数据的组数。每组测试数据第一行是一个正整数n(1<=n<=10000)表示宇航员行走的次数,下面n行每行输入一次相对行走,格式如上所述,其中( 1 <= x <= 10000 为正整数)。 Output 对于每组输入数据输出一行,x y z p, 中间用空格隔开,x y z是宇航员的位置的绝对坐标,p是宇航员面向的绝对方向编号(0<=p <=5)。 Sample Input 1 6 left 10 right 11 up 12 down 13 forward 14 back 15 Sample Output 23 -10 12 3 Source qinlu@POJ |
[Submit] [Go Back] [Status] [Discuss]
思路:用head来记录头的方向,用dir来记录当前面对的方向,用left来记录左手指的方向,然后=发出每次命令的时候改变值并且模6。
代码:
#include <stdio.h>
#include <string.h>
#include <string>
#include <iostream>
#include <stack>
#include <queue>
#include <vector>
#include <algorithm>
#define mem(a,b) memset(a,b,sizeof(a))
#define N 1000+20
#define inf 0x3f3f3f3f
#define M 1000000+2000
#define LL long long
using namespace std;
char s[100];
int step,x,y,z;
void go(int dir)
{switch(dir){case 0:x+=step;break;case 1:y+=step;break;case 2:z+=step;break;case 3:x-=step;break;case 4:y-=step;break;case 5:z-=step;break;default:break;}
}
int main()
{int t,n;//head代表头的方向,dir代表面向的绝对方向//left代表左手指的方向int head,dir,left,temp;scanf("%d",&t);while(t--){head=2,dir=0,left=4,x=0,y=0,z=0;scanf("%d",&n);while(n--){scanf("%s%d",s,&step);switch(s[0]){case 'f':break;//forwardcase 'b':dir=(dir+3)%6,left=(left+3)%6;break;//backcase 'l':temp=left,left=(dir+3)%6,dir=temp;break;//leftcase 'r':temp=dir,dir=(left+3)%6,left=temp;break;//rightcase 'u':temp=head,head=(dir+3)%6,dir=temp;break;//upcase 'd':temp=dir,dir=(head+3)%6,head=temp;break;//downdefault:break;}go(dir);}printf("%d %d %d %d\n",x,y,z,dir);}return 0;
}
这篇关于POJ1835 宇航员(模拟)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









