本文主要是介绍FPV穿越机蜂群系统技术详解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FPV穿越机蜂群系统技术是一种结合了无人机集群控制、自主导航、通信技术和实时数据处理等先进技术的综合性系统。以下是对FPV穿越机蜂群系统技术的详细解析:
一、系统概述
FPV穿越机蜂群系统是指将多架FPV穿越机通过先进的通信和控制技术组织成一个高度协同的群体,以执行复杂多样的任务。该系统模仿了自然界中生物群体(如蜜蜂、蚂蚁)的行为模式,利用群体智能实现高效协同作业。

二、关键技术
1. 自主导航与定位
依赖GPS、惯性导航及视觉识别技术,确保每架穿越机都能精准定位并规划出最优飞行路径。
视觉识别技术还可用于障碍物检测和避障,提高飞行安全性。
2. 通信与数据链
采用高速、低延迟、抗干扰的通信技术(如Wi-Fi、蓝牙、ZigBee、LoRa等),保障群体内穿越机之间的实时信息交换。
常用的通信技术还包括新兴的5G、6G等移动通信技术,以提高通信的可靠性和稳定性。
3. 分布式控制与协同
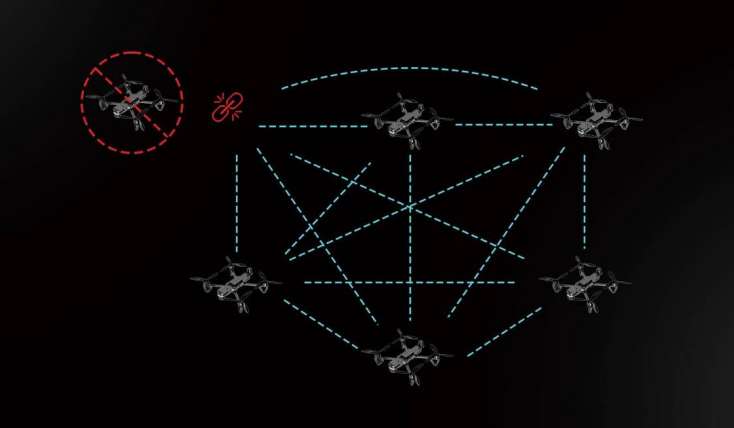
分布式控制结构使每架穿越机都能根据任务需求和局部信息自主决策,同时与其他穿越机保持协同。
中央控制器负责全局规划和任务分配,而分布式控制器则负责本地穿越机的控制和与其他穿越机的协同。
4. 路径规划与碰撞避免
路径规划算法为每架穿越机规划出从起点到终点的最优路径,考虑环境因素(如地形、障碍物、风速等)和任务需求。
碰撞避免策略包括感知避障和预测避障,通过搭载传感器实时检测周围环境并预测其他穿越机的运动轨迹,以避免碰撞。
5. 实时数据处理
涉及大量的实时数据处理任务,如传感器数据的采集与融合、状态估计与预测、控制指令的生成与发送等。
采用并行处理、流处理等技术手段提高数据处理效率,满足高速度、高精度和低延迟的要求。
6. 模块化设计
穿越机设计具备模块化特点,便于快速更换任务载荷(如相机、传感器等),以满足不同作战或任务需求。
三、应用场景
1. 高速饱和攻击
一个遥控器可统一控制多架穿越机,进行编队打击单个或多个固定、移动目标。
适用于军事侦察、目标打击等场景。
2. 搜索与救援
利用蜂群系统的大范围覆盖和高效协同能力,快速搜索并定位失踪人员或物体。
3. 航拍与拍摄
在影视制作、广告拍摄等领域,利用FPV穿越机蜂群系统拍摄复杂多变的镜头和场景。
四、未来发展趋势
1. 智能化与自主化
随着人工智能和机器学习技术的不断发展,FPV穿越机蜂群系统将更加智能化和自主化,能够执行更加复杂、精细的任务。
2. 高效协同
进一步优化分布式控制和协同算法,提高群体内穿越机的协同效率和作战效能。
3. 广泛应用
除了军事和救援领域外,FPV穿越机蜂群系统还将在航拍、物流、农业等多个领域得到广泛应用。
综上所述,FPV穿越机蜂群系统技术是一项高度综合性和前瞻性的技术,其发展将为多个领域带来革命性的变革。
这篇关于FPV穿越机蜂群系统技术详解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






