本文主要是介绍虹科技术|全新Linux环境PCAN驱动程序发布!CAN/CAN FD通信体验全面升级!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

全新8.17.0版本的PCAN-Linux驱动程序正式发布,专为CAN和CAN FD接口量身打造。无论是CAN 2.0 a/b还是CAN FD的PCAN硬件产品,都能在我们的新驱动下“驰骋自如”。想要体验字符模式设备驱动接口(chardev)的便捷,还是SocketCAN设备驱动接口(netdev)的高效?都由您说了算!
新版本驱动包概览
1、设备驱动程序模块源代码及Makefile文件,确保驱动与系统的完美兼容与高效运行。
2、用户库文件源代码及Makefile文件,为用户提供便捷的API接口,简化开发流程。
3、测试用文件源代码及Makefile文件,方便用户对驱动进行全面的功能测试与性能评估。
4、Linux环境中PCAN Basic示例源代码及Makefile文件,为初学者提供直观的学习与参考案例。
5、Udev规则,确保设备在Linux系统中的自动识别与配置。
6、详细的产品手册,为用户提供全面的安装、配置及使用指南。
新版本主要改进点
1、改进了对PCAN-USB Pro FD硬件版本为v4(固件版本<3.4.6)的支持,增强了驱动的兼容性与稳定性。
2、添加了对潜在内核消息泛流的新保护机制,有效减少系统资源的占用,提升系统性能。
3、支持针对内核v6.4和v6.5的编译,确保驱动在新版Linux内核上的顺畅运行。
4、在netdev模式中修复了潜在的内核崩溃,进一步提升了系统的稳定性与可靠性。
5、升级了Linux环境中PCAN-Basic API至4.8.0版本,为用户提供了更丰富、更强大的功能。
新版驱动安装指导
1、下载驱动:
1 | wget https://www.peak-system.com/fileadmin/media/linux/files/peak-linux-driver-8.17.0.tar.gz
2、解压文件:
1 | tar -xzf peak-linux-driver-8.17.0.tar.gz
3、编译驱动(GCC版本要求12以上):
1 | make clean all
1 | make
此处将驱动编译为cahrdev模式,若要使用SocketCAN,需将驱动编译为netdev模式,编译命令改为: 1 | make netdev
4、下载驱动:
1 | sudo make uninstall
1 | sudo make install
5、加载模块:
1 | sudo modprobe pcan
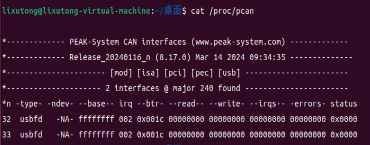
6、检测驱动安装是否成功:
1 | cat proc/pcan
结语
在充满创新与变革的时代,我们深知每一点进步都可能为用户带来前所未有的体验。新版PCAN-Linux驱动程序(8.17.0版本)不仅继承了前代版本的优秀特性,更在兼容性、稳定性及性能上进行了全面提升。我们诚挚邀请广大用户下载体验,并期待收到您的宝贵反馈,共同推动CAN通信技术的发展。
这篇关于虹科技术|全新Linux环境PCAN驱动程序发布!CAN/CAN FD通信体验全面升级!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







