本文主要是介绍mask rcnn解读,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一篇中介绍faster rcnn,这次mask 基本在上次的基础上加了点代码,参考和引用1. mask rcnn slides 2. kaiming he maskrcnn 3. Ardian Umam mask rcnn,欢迎fork简版mask rcnn
整体框架
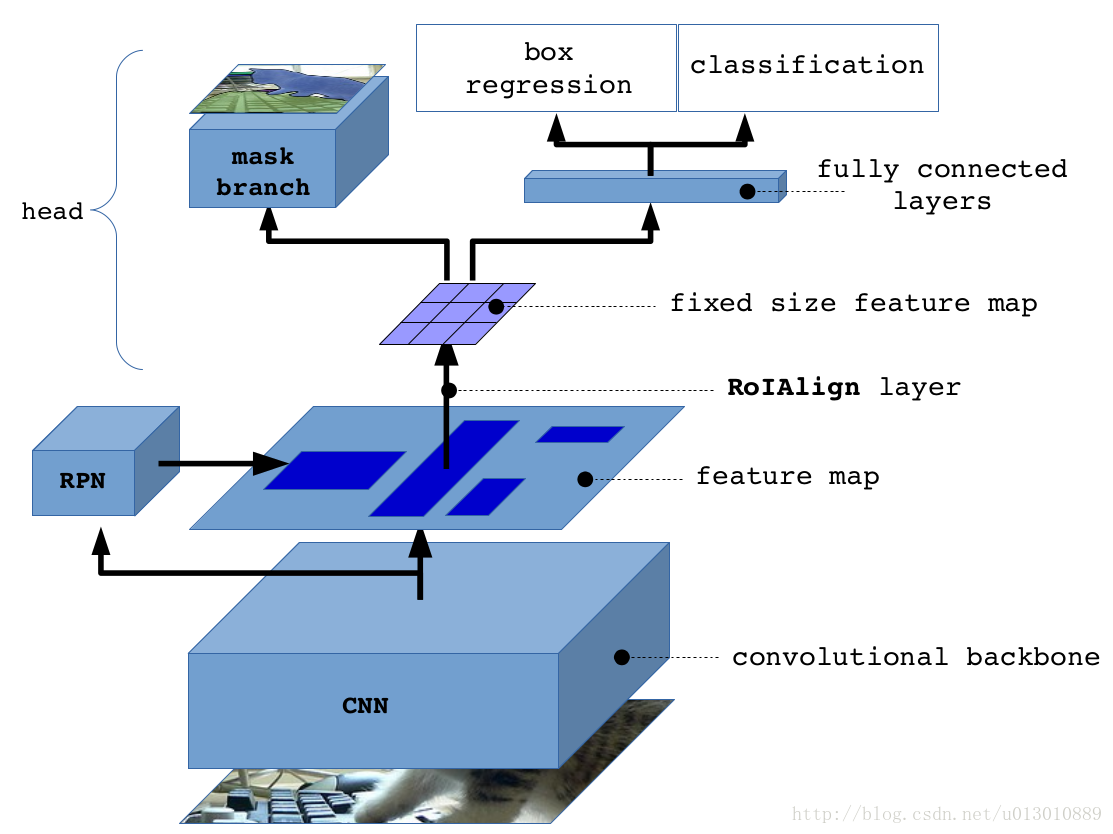
RoIAlign
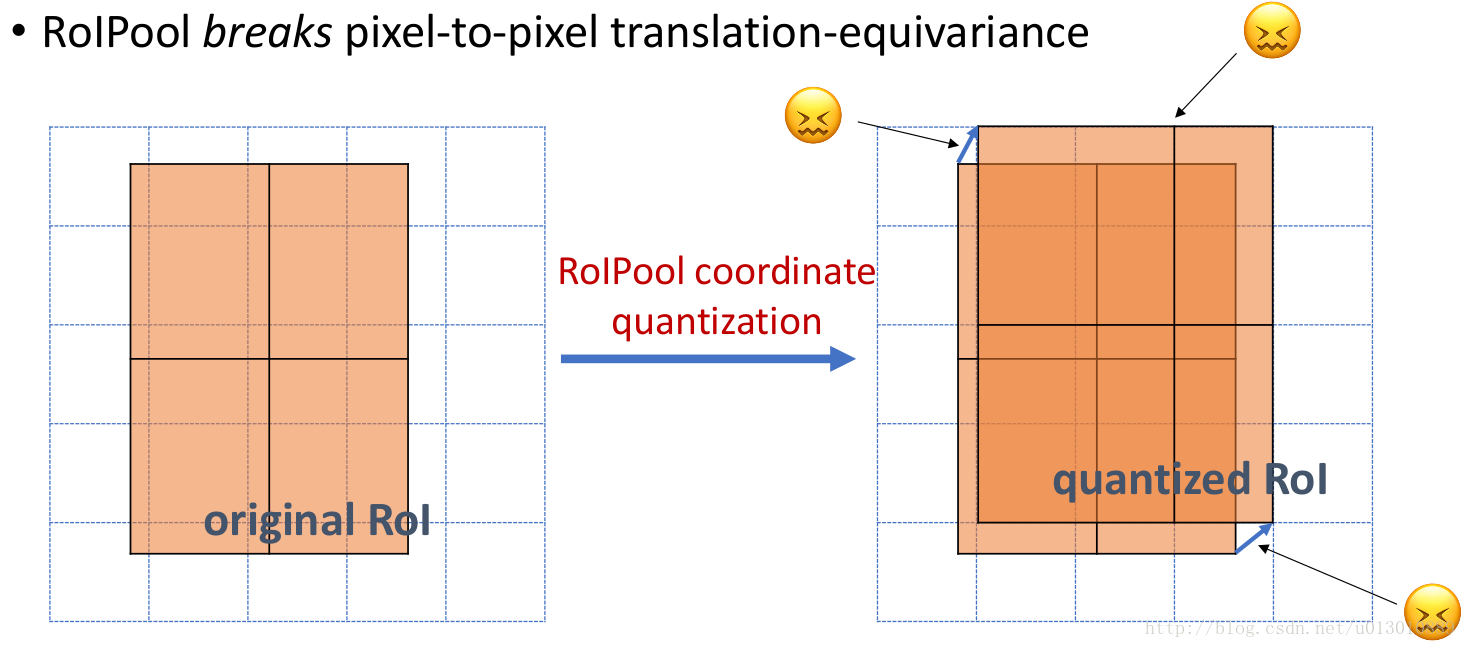
问题
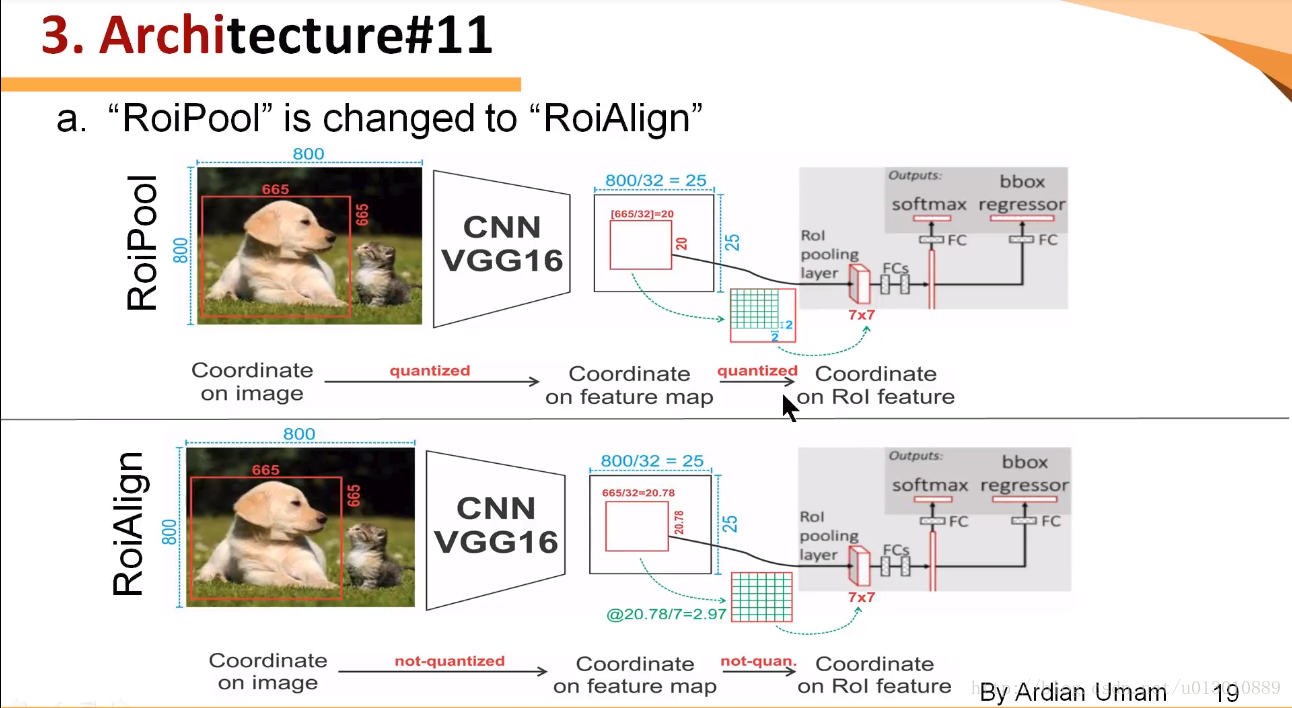
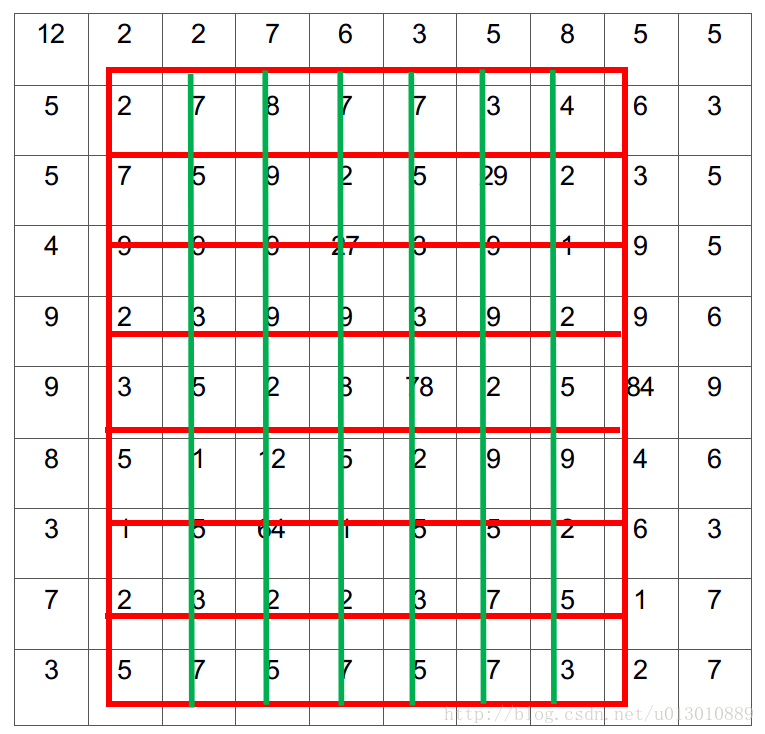
做segment是pixel级别的,但是faster rcnn中roi pooling有2次量化操作导致了没有对齐
两次量化,第一次roi映射feature时,第二次roi pooling时(这个图参考了youtube的视频,但是感觉第二次量化它画错了,根据上一讲ross的源码,不是缩小了,而是部分bin大小和步长发生变化)
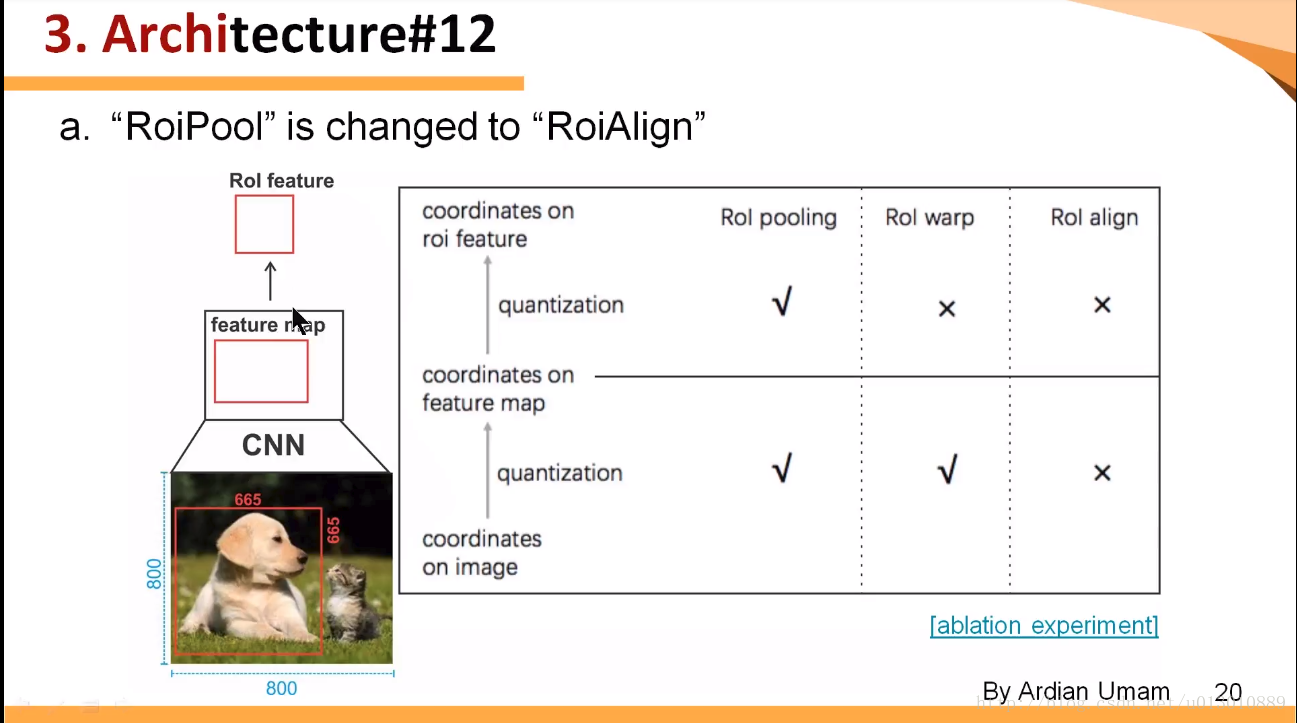
RoIWarp,第一次量化了,第二次没有,RoIAlign两次都没有量化
解决方案
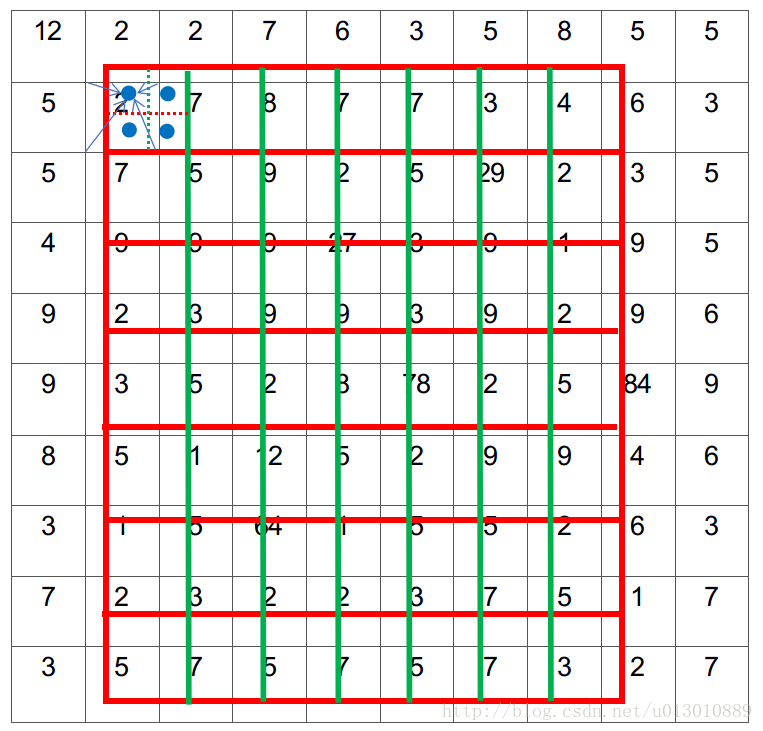
和上一讲faster rcnn举的例子一样,输出7*7
划分7*7的bin(我们可以直接精确的映射到feature map来划分bin,不用第一次量化)
每个bin中采样4个点,双线性插值
对每个bin4个点做max或average pool
# pytorch
# 这是pytorch做法先采样到14*14,然后max pooling到7*7
pre_pool_size = cfg.POOLING_SIZE * 2
grid = F.affine_grid(theta, torch.Size((rois.size(0), 1, pre_pool_size, pre_pool_size)))
crops = F.grid_sample(bottom.expand(rois.size(0), bottom.size(1), bottom.size(2), bottom.size(3)), grid, mode=mode)
crops = F.max_pool2d(crops, 2, 2)
# tensorflow
pooled.append(tf.image.crop_and_resize(feature_maps[i], level_boxes, box_indices, self.pool_shape,method="bilinear"))sigmoid代替softmax
利用分类的结果,在mask之路,只取对应类别的channel然后做sigmoid,减少类间竞争,避免出现一些洞之类(个人理解)
FPN
详见我的另一篇博客FPN解读
更多
前面我们介绍RoI Align是在每个bin中采样4个点,双线性插值,但也是一定程度上解读了mismatch问题,而旷视科技PLACES instance segmentation比赛中所用的是更精确的解决这个问题,对于每个bin,RoIAlign只用了4个值求平均,而旷视则直接利用积分(把bin中所有位置都插值出来)求和出这一块的像素值和然后求平均,这样更精确了但是很费时。
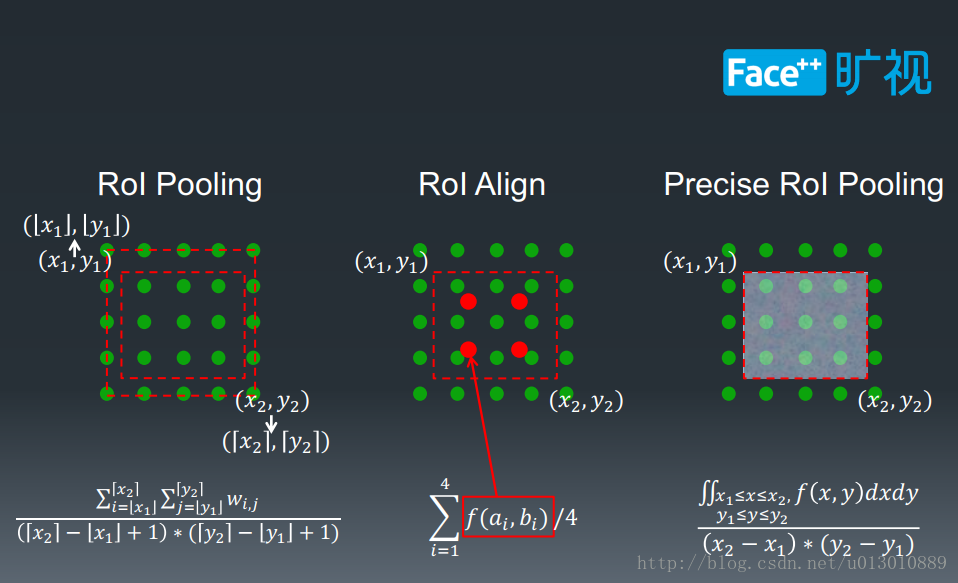
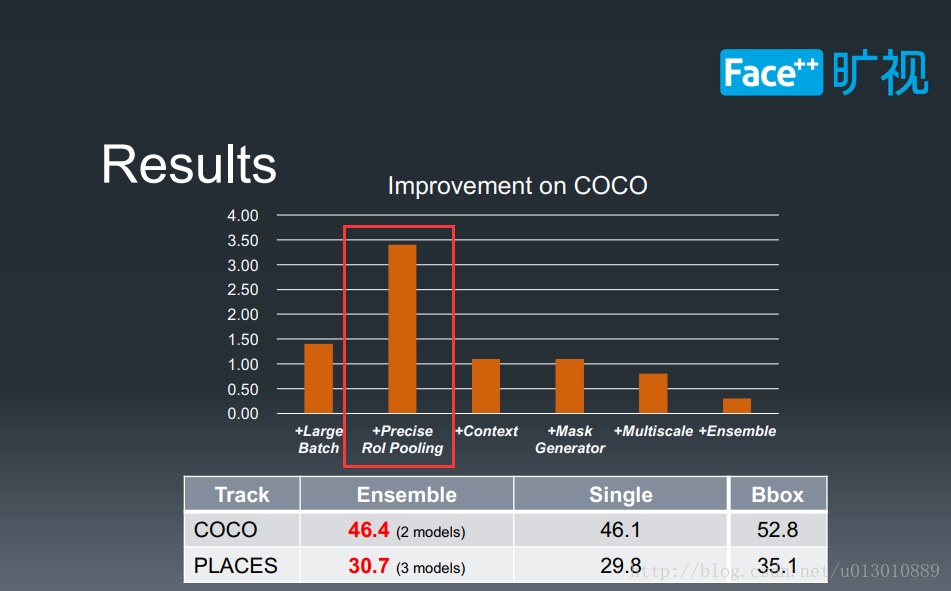
来源旷视科技peng chao分享的video和slides
Detectron部分代码细节点
- 无bn,因为batch太小了,使用affine channel
- mask分支,只使用fg_rois,只用前景的rois
- faster rcnn的rpn部分,是生成9*2=18个channel,然后每个格子对应9个anchor,2是前景和背景,使用softmax loss而Detectron中rpn是9个channel,使用sigmoid loss
- 所有的gt box都默认送到后面的fast rcnn和mask等分支中
- 准备gt_masks时,不是用gt_boxes去全图mask上扣,然后resize到28*28,而是用预测出来的fg_rois去全图的mask上扣然后resize到28*28,这样才能正常训练的mask分支,不然gt_masks的位置根本不对。这和我们采用gt_classes去抽取对应channel的score map做sigmoid一样,目的都是为了能让mask分支受到正常的监督,因为我们自己预测的类别可能是错的,这样抽取错误的channel去做sigmoid然后与gt_masks做loss,是错误的监督。
这篇关于mask rcnn解读的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







