本文主要是介绍鸿蒙Harmony实战开发:Touchscreen驱动器件硬件接口使用实例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
功能简介
Touchscreen驱动用于驱动触摸屏使其正常工作,该驱动主要完成如下工作:对触摸屏驱动IC进行上电、配置硬件管脚并初始化其状态、注册中断、配置通信接口(I2C或SPI)、设定Input相关配置、下载及更新固件等操作。
在HDF(Hardware Driver Foundation)驱动管理框架的基础上,Input驱动模型通过调用OSAL接口层和Platform接口层提供的基础接口进行开发,涉及的接口包括bus通信接口、操作系统原生接口(memory、lock、thread、timer等)。由于OSAL接口和Platform接口屏蔽了芯片平台的差异,所以基于Input驱动模型实现的Touchscreen驱动可以进行跨平台、跨OS迁移,从而实现驱动的一次开发、多端部署。
运作机制
Input模型整体的框架如图1所示。Input驱动模型基于HDF驱动框架、Platform接口、OSAL接口进行开发,向上对接规范化的驱动接口HDI(Hardware Device Interface)层,通过Input-HDI层对外提供硬件能力,即上层Input Service可以通过HDI接口层获取相应的驱动能力,进而操控Touchscreen等输入设备。
图1 基于HDF驱动框架的Input驱动模型
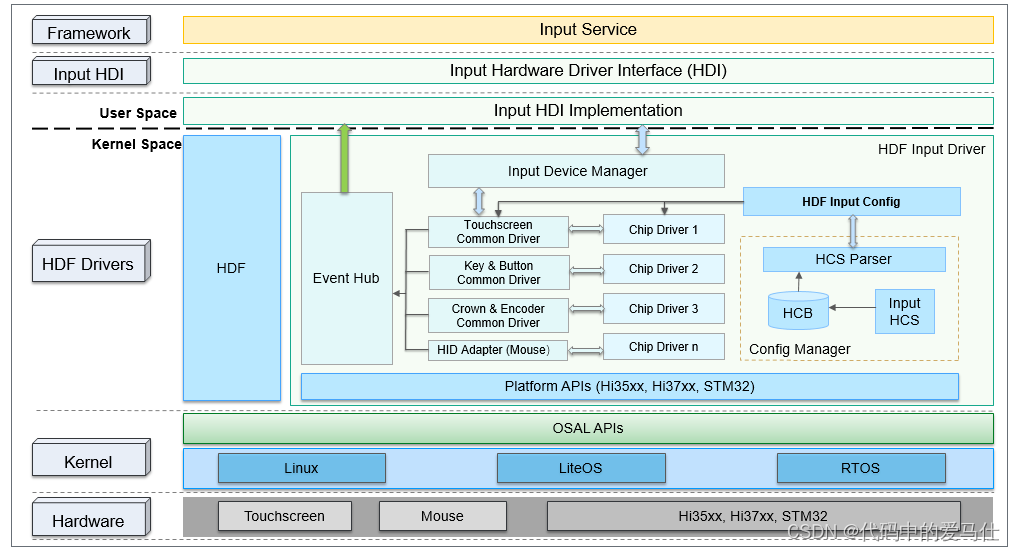
Input驱动模型核心部分由设备管理层、公共驱动层、器件驱动层组成。器件产生的数据借助平台数据通道能力从内核传递到用户态,驱动模型通过配置文件适配不同器件及硬件平台,提高开发者对器件驱动的开发效率。如下为模型各部分的说明:
- Input设备管理:为各类输入设备驱动提供Input设备的注册、注销接口,同时对Input设备列表进行统一管理。
- Input平台驱动:指各类Input设备的公共抽象驱动(例如触摸屏的公共驱动),该部分主要负责对板级硬件进行初始化、硬件中断处理、向manager注册Input设备等。
- Input器件驱动:指各器件厂家的差异化驱动,开发者可以通过适配平台驱动预留的差异化接口进行器件驱动开发,实现器件驱动开发量最小化。
- Input数据通道:提供一套通用的数据上报通道,各类别的Input设备驱动均可用此通道上报Input事件。
- Input配置解析:负责对Input设备的板级配置及器件私有配置进行解析及管理。
开发指导
场景介绍
Input模块主要完成如下工作:对触摸屏驱动IC进行上电、配置硬件管脚并初始化其状态、注册中断、配置通信接口(I2C或SPI)、设定Input相关配置、下载及更新固件等操作。
接口说明
硬件接口
Touchscreen器件的硬件接口相对简单,根据PIN脚的属性,可以简单分为如下三类:
-
电源接口
-
IO控制接口
-
通信接口
图2 Touchscreen器件常用管脚
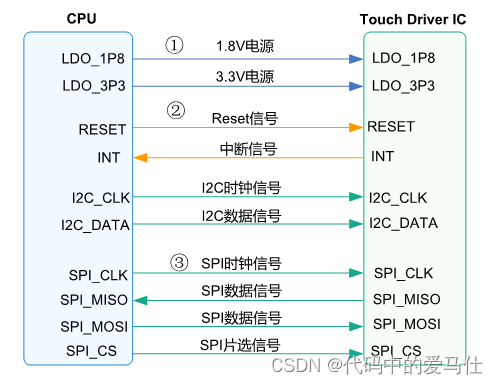
对于上图所示的三类接口,简要说明如下:
-
电源接口
-
LDO_1P8:1.8V数字电路
-
LDO_3P3:3.3V模拟电路
通常情况下,Touchscreen驱动IC和LCD驱动IC是相互分离的,这种情况下,Touchscreen驱动IC一般同时需要1.8V和3.3V两路供电。随着芯片的演进,业内已有将Touchscreen驱动IC和LCD驱动IC集成在一颗IC中的案例,对Touchscreen而言,只需要关注1.8V供电即可,其内部需要的3.3V电源,会在驱动IC内部从LCD的VSP电源(典型值5.5V)中分出来。
-
-
IO控制接口
- Reset:reset管脚,用于在系统休眠、唤醒时,由主机侧对驱动IC进行复位操作。
- INT:中断管脚,需要在驱动初始化时,配置为输入上拉状态。在驱动IC检测到外部触摸信号后,通过操作中断管脚来触发中断,器件驱动则会在中断处理函数中进行报点数据读取等操作。
-
通信接口
- I2C:由于Touchscreen的报点数据量相对较少,所以一般选用I2C方式传输数据。I2C的具体协议及对应操作接口
- SPI:在需要传递的数据不止包含报点坐标,还包含基础容值的情况下,由于需要传递的数据量较大,所以部分厂商会选用SPI通信方式。SPI的具体协议及对应操作接口
软件接口
Input HDF驱动提供给系统服务Input Service调用的HDI驱动能力接口,按照业务范围可以分为三大模块:Input设备管理模块、Input数据上报模块、Input业务控制模块,具体的接口如下表所示,包括:输入设备打开及关闭接口、注册设备监听的回调接口、设备信息查询接口、电源状态控制接口等。
-
input_manager.h
接口名称 功能描述 int32_t (*OpenInputDevice)(uint32_t devIndex); 打开Input设备 int32_t (*CloseInputDevice)(uint32_t devIndex); 关闭Input设备 int32_t (*GetInputDevice)(uint32_t devIndex, DeviceInfo **devInfo); 获取指定ID的设备信息 int32_t (*GetInputDeviceList)(uint32_t *devNum, DeviceInfo **devList, uint32_t size); 获取所有设备列表信息 -
input_reporter.h
接口名称 功能描述 int32_t (*RegisterReportCallback)(uint32_t devIndex, InputReportEventCb *callback); 注册Input设备的回调 int32_t (*UnregisterReportCallback)(uint32_t devIndex); 注销Input设备的回调 void (*ReportEventPkgCallback)(const EventPackage **pkgs, uint32_t count); 上报数据的回调函数 -
input_controller.h
接口名称 功能描述 int32_t (*SetPowerStatus)(uint32_t devIndex, uint32_t status); 设置电源状态 int32_t (*GetPowerStatus)(uint32_t devIndex, uint32_t *status); 获取电源状态 int32_t (*GetDeviceType)(uint32_t devIndex, uint32_t *deviceType); 获取设备类型 int32_t (*GetChipInfo)(uint32_t devIndex, char *chipInfo, uint32_t length); 获取器件编码信息 int32_t (*GetVendorName)(uint32_t devIndex, char *vendorName, uint32_t length); 获取模组厂商名 int32_t (*GetChipName)(uint32_t devIndex, char *chipName, uint32_t length); 获取芯片厂商名 int32_t (*SetGestureMode)(uint32_t devIndex, uint32_t gestureMode); 设置手势模式 int32_t (*RunCapacitanceTest)(uint32_t devIndex, uint32_t testType, char *result, uint32_t length); 执行容值自检测试 int32_t (*RunExtraCommand)(uint32_t devIndex, InputExtraCmd *cmd); 执行拓展指令
开发步骤
以Touchscreen器件驱动为例,Input驱动模型的完整加载流程可以分为六步:
-
设备描述配置:由开发者参考已有模板进行设备描述配置,配置的信息包括驱动加载顺序、板级硬件信息、器件私有数据信息等。
-
加载Input设备管理驱动:由HDF驱动加载Input设备管理驱动,完成设备manager的创建并对其初始化。
-
加载平台驱动:平台驱动由HDF框架加载,主要完成板级配置解析及硬件初始化,并提供器件注册接口。
-
加载器件驱动:器件驱动也由HDF框架加载,完成器件设备的实例化,包括器件私有配置解析和平台预留的差异化接口适配。
-
器件设备向平台驱动注册:将实例化的器件设备注册到平台驱动,实现设备和驱动的绑定,并完成中断注册、上下电等器件初始化工作。
-
Input设备注册:在器件初始化完成后,实例化Input设备,并将其注册到Input manager进行管理。
根据Input驱动模型的加载流程可知,Touchscreen器件驱动的开发过程主要包含以下三个步骤:
-
设备描述配置:目前Input驱动基于HDF驱动框架编写,驱动的加载启动由HDF驱动管理框架统一处理。首先需要在对应的配置文件中,将驱动信息注册进去,如是否加载、加载优先级,此后HDF驱动框架会逐一启动注册过的驱动模块。
-
板级配置及Touchscreen器件私有配置:配置对应的IO管脚功能,例如对单板上为Touchscreen设计预留的I2C Pin脚,需设置对应的寄存器,使其选择I2C的通信功能。
-
实现器件差异化适配接口:根据硬件单板设计的通信接口,使用Platform接口层提供的管脚操作接口配置对应的复位管脚、中断管脚以及电源操作,对于GPIO的操作
开发实例
下面以RK3568开发板的Input模块为例,说明Touchscreen器件的适配和接口使用方法。
-
设备描述配置
如下配置主要包含Input驱动模型各模块层级信息,配置文件路径为vendor/hihope/rk3568/hdf_config/khdf/device_info/device_info.hcs。具体原理可参考HDF驱动开发流程,HDF框架依据该配置信息实现对Input模型各模块的依次加载等。
input :: host {hostName = "input_host";priority = 100;device_input_manager :: device {device0 :: deviceNode {policy = 2; // 向外发布服务priority = 100; // 加载优先级,在input模块内,manager模块优先级应为最高preload = 0; // 加载该驱动,0:加载;1:不加载permission = 0660;moduleName = "HDF_INPUT_MANAGER";serviceName = "input_dev_manager";deviceMatchAttr = "";}}device_hdf_touch :: device {device0 :: deviceNode {policy = 2;priority = 120;preload = 0;permission = 0660;moduleName = "HDF_TOUCH";serviceName = "event1";deviceMatchAttr = "touch_device1";}}device_touch_chip :: device {device0 :: deviceNode {policy = 0;priority = 130;preload = 0;permission = 0660;moduleName = "HDF_TOUCH_SAMPLE";serviceName = "hdf_touch_sample_service";deviceMatchAttr = "zsj_sample_5p5";}} } -
板级配置及器件私有配置
如下配置包含板级硬件配置及器件私有数据配置,配置文件路径为vendor/hihope/rk3568/hdf_config/khdf/input/input_config.hcs。实际业务开发时,可根据具体需求增删及修改如下配置文件信息。
root {input_config {touchConfig {touch0 {boardConfig {match_attr = "touch_device1";inputAttr {inputType = 0; // 0代表触摸屏solutionX = 480; solutionY = 960;devName = "main_touch"; // 设备名称}busConfig {busType = 0; // 0代表I2CbusNum = 6;clkGpio = 86;dataGpio = 87;i2cClkIomux = [0x114f0048, 0x403]; // i2c_clk对应pin的寄存器配置i2cDataIomux = [0x114f004c, 0x403]; // i2c_data对应pin的寄存器配置}pinConfig {rstGpio = 3;intGpio = 4;rstRegCfg = [0x112f0094, 0x400]; // reset对应pin的寄存器配置intRegCfg = [0x112f0098, 0x400]; // interrupt对应pin的寄存器配置}powerConfig {vccType = 2; // 1代表LDO、2代表GPIO、3代表PMICvccNum = 20; // GPIO号为20vccValue = 1800; // 电压幅值为1800mVvciType = 1;vciNum = 12;vciValue = 3300;}featureConfig {capacitanceTest = 0;gestureMode = 0;gloverMOde = 0;coverMode = 0;chargerMode = 0;knuckleMode = 0;}}chipConfig {template touchChip {match_attr = "";chipName = "sample";vendorName = "zsj";chipInfo = "AAAA11222"; // 1~4字符代表产品名,5~6字符代表IC型号,7~9字符代表模型型号busType = 0;deviceAddr = 0x5D;irqFlag = 2; // 1代表上升沿触发,2代表下降沿触发,4代表高电平触发,8代表低电平触发maxSpeed = 400;chipVersion = 0;powerSequence {/* 上电时序的配置含义说明:[类型, 状态, 方向 , 延时]<type> 0代表空,1代表vcc电源(1.8V),2代表VCI电源(3.3V),3代表复位管脚,4代表中断管脚<status> 0代表下电或拉低,1代表上电或拉高,2代表无操作<dir> 0代表输入方向,1代表输出方向,2代表无操作<delay> 代表延时多少毫秒, 例如20代表延时20ms*/powerOnSeq = [4, 0, 1, 0,3, 0, 1, 10,3, 1, 2, 60,4, 2, 0, 0];suspendSeq = [3, 0, 2, 10];resumeSeq = [3, 1, 2, 10];powerOffSeq = [3, 0, 2, 10,1, 0, 2, 20];}}chip0 :: touchChip {match_attr = "zsj_sample_5p5";chipInfo = "ZIDN45100";chipVersion = 0;}}}}} } -
添加器件驱动
在器件驱动中,主要实现了平台预留的差异化接口,以器件数据获取及解析进行示例说明,代码路径为drivers/hdf_core/framework/model/input/driver/touchscreen/touch_gt911.c。具体开发过程,需要根据实际使用的单板及器件进行适配。
/* 将从器件中读取到的报点数据解析为坐标 */ static void ParsePointData(ChipDevice *device, FrameData *frame, uint8_t *buf, uint8_t pointNum) {int32_t resX = device->driver->boardCfg->attr.resolutionX;int32_t resY = device->driver->boardCfg->attr.resolutionY;for (int32_t i = 0; i < pointNum; i++) {frame->fingers[i].y = (buf[GT_POINT_SIZE * i + GT_X_LOW] & ONE_BYTE_MASK) |((buf[GT_POINT_SIZE * i + GT_X_HIGH] & ONE_BYTE_MASK) << ONE_BYTE_OFFSET);frame->fingers[i].x = (buf[GT_POINT_SIZE * i + GT_Y_LOW] & ONE_BYTE_MASK) |((buf[GT_POINT_SIZE * i + GT_Y_HIGH] & ONE_BYTE_MASK) << ONE_BYTE_OFFSET);frame->fingers[i].valid = true;} } /* 从器件中获取报点数据 */ static int32_t ChipDataHandle(ChipDevice *device) {int32_t ret;uint8_t touchStatus = 0;uint8_t pointNum;uint8_t buf[GT_POINT_SIZE * MAX_SUPPORT_POINT] = {0};InputI2cClient *i2cClient = &device->driver->i2cClient;uint8_t reg[GT_ADDR_LEN] = {0};FrameData *frame = &device->driver->frameData;reg[0] = (GT_BUF_STATE_ADDR >> ONE_BYTE_OFFSET) & ONE_BYTE_MASK;reg[1] = GT_BUF_STATE_ADDR & ONE_BYTE_MASK;ret = InputI2cRead(i2cClient, reg, GT_ADDR_LEN, &touchStatus, 1);if (ret < 0 || touchStatus == GT_EVENT_INVALID) {return HDF_FAILURE;}OsalMutexLock(&device->driver->mutex);(void)memset_s(frame, sizeof(FrameData), 0, sizeof(FrameData));if (touchStatus == GT_EVENT_UP) {frame->realPointNum = 0;frame->definedEvent = TOUCH_UP;goto exit;}reg[0] = (GT_X_LOW_BYTE_BASE >> ONE_BYTE_OFFSET) & ONE_BYTE_MASK;reg[1] = GT_X_LOW_BYTE_BASE & ONE_BYTE_MASK;pointNum = touchStatus & GT_FINGER_NUM_MASK;if (pointNum <= 0 || pointNum > MAX_SUPPORT_POINT) {HDF_LOGE("%s: pointNum is invalid, %d", __func__, pointNum);(void)ChipCleanBuffer(i2cClient);OsalMutexUnlock(&device->driver->mutex);return HDF_FAILURE;}frame->realPointNum = pointNum;frame->definedEvent = TOUCH_DOWN;/* 从寄存器中读取报点值 */(void)InputI2cRead(i2cClient, reg, GT_ADDR_LEN, buf, GT_POINT_SIZE * pointNum);/* 解析报点值 */ParsePointData(device, frame, buf, pointNum); exit:OsalMutexUnlock(&device->driver->mutex);if (ChipCleanBuffer(i2cClient) != HDF_SUCCESS) {return HDF_FAILURE;}return HDF_SUCCESS; }static struct TouchChipOps g_sampleChipOps = {.Init = ChipInit,.Detect = ChipDetect,.Resume = ChipResume,.Suspend = ChipSuspend,.DataHandle = ChipDataHandle, };static TouchChipCfg *ChipConfigInstance(struct HdfDeviceObject *device) {TouchChipCfg *chipCfg = (TouchChipCfg *)OsalMemAlloc(sizeof(TouchChipCfg));if (chipCfg == NULL) {HDF_LOGE("%s: instance chip config failed", __func__);return NULL;}(void)memset_s(chipCfg, sizeof(TouchChipCfg), 0, sizeof(TouchChipCfg));/* 解析器件私有配置 */if (ParseTouchChipConfig(device->property, chipCfg) != HDF_SUCCESS) {HDF_LOGE("%s: parse chip config failed", __func__);OsalMemFree(chipCfg);chipCfg = NULL;}return chipCfg; }static ChipDevice *ChipDeviceInstance(void) {ChipDevice *chipDev = (ChipDevice *)OsalMemAlloc(sizeof(ChipDevice));if (chipDev == NULL) {HDF_LOGE("%s: instance chip device failed", __func__);return NULL;}(void)memset_s(chipDev, sizeof(ChipDevice), 0, sizeof(ChipDevice));return chipDev; }static void FreeChipConfig(TouchChipCfg *config) {if (config->pwrSeq.pwrOn.buf != NULL) {OsalMemFree(config->pwrSeq.pwrOn.buf);}if (config->pwrSeq.pwrOff.buf != NULL) {OsalMemFree(config->pwrSeq.pwrOff.buf);}OsalMemFree(config); }static int32_t HdfSampleChipInit(struct HdfDeviceObject *device) {TouchChipCfg *chipCfg = NULL;ChipDevice *chipDev = NULL;HDF_LOGE("%s: enter", __func__);if (device == NULL) {return HDF_ERR_INVALID_PARAM;}/* 器件私有配置解析 */chipCfg = ChipConfigInstance(device);if (chipCfg == NULL) {return HDF_ERR_MALLOC_FAIL;}/* 器件设备实例化 */chipDev = ChipDeviceInstance();if (chipDev == NULL) {goto freeCfg;}chipDev->chipCfg = chipCfg;chipDev->ops = &g_sampleChipOps;chipDev->chipName = chipCfg->chipName;chipDev->vendorName = chipCfg->vendorName;/* 器件设备注册到平台驱动 */if (RegisterChipDevice(chipDev) != HDF_SUCCESS) {goto freeDev;}HDF_LOGI("%s: exit succ, chipName = %s", __func__, chipCfg->chipName);return HDF_SUCCESS;freeDev:OsalMemFree(chipDev); freeCfg:FreeChipConfig(chipCfg);return HDF_FAILURE; }struct HdfDriverEntry g_touchSampleChipEntry = {.moduleVersion = 1,.moduleName = "HDF_TOUCH_SAMPLE",.Init = HdfSampleChipInit, };HDF_INIT(g_touchSampleChipEntry); -
调用Input HDI接口
下面通过示例代码说明上层输入系统服务调用Input HDI的步骤。
#include "input_manager.h" #define DEV_INDEX 1IInputInterface *g_inputInterface; InputReportEventCb g_callback;/* 定义数据上报的回调函数 */ static void ReportEventPkgCallback(const EventPackage **pkgs, uint32_t count) {if (pkgs == NULL || count > MAX_PKG_NUM) {return;}for (uint32_t i = 0; i < count; i++) {HDF_LOGI("%s: pkgs[%d] = 0x%x, 0x%x, %d", __func__, i, pkgs[i]->type, pkgs[i]->code, pkgs[i]->value);} }int InputServiceSample(void) {uint32_t devType = INIT_DEFAULT_VALUE;/* 获取Input驱动能力接口 */int ret = GetInputInterface(&g_inputInterface);if (ret != INPUT_SUCCESS) {HDF_LOGE("%s: get input interfaces failed, ret = %d", __func__, ret);return ret;}INPUT_CHECK_NULL_POINTER(g_inputInterface, INPUT_NULL_PTR);INPUT_CHECK_NULL_POINTER(g_inputInterface->iInputManager, INPUT_NULL_PTR);/* 打开特定的Input设备 */ret = g_inputInterface->iInputManager->OpenInputDevice(DEV_INDEX);if (ret) {HDF_LOGE("%s: open input device failed, ret = %d", __func__, ret);return ret;}INPUT_CHECK_NULL_POINTER(g_inputInterface->iInputController, INPUT_NULL_PTR);/* 获取对应Input设备的类型 */ret = g_inputInterface->iInputController->GetDeviceType(DEV_INDEX, &devType);if (ret) {HDF_LOGE("%s: get device type failed, ret: %d", __FUNCTION__, ret);return ret;}HDF_LOGI("%s: device1's type is %u\n", __FUNCTION__, devType);/* 给特定的Input设备注册数据上报回调函数 */g_callback.ReportEventPkgCallback = ReportEventPkgCallback;INPUT_CHECK_NULL_POINTER(g_inputInterface->iInputReporter, INPUT_NULL_PTR);ret = g_inputInterface->iInputReporter->RegisterReportCallback(DEV_INDEX, &g_callback);if (ret) {HDF_LOGE("%s: register callback failed, ret: %d", __FUNCTION__, ret);return ret;}HDF_LOGI("%s: wait 10s for testing, pls touch the panel now", __FUNCTION__);OsalMSleep(KEEP_ALIVE_TIME_MS);/* 注销特定Input设备上的回调函数 */ret = g_inputInterface->iInputReporter->UnregisterReportCallback(DEV_INDEX);if (ret) {HDF_LOGE("%s: unregister callback failed, ret: %d", __FUNCTION__, ret);return ret;}/* 关闭特定的Input设备 */ret = g_inputInterface->iInputManager->CloseInputDevice(DEV_INDEX);if (ret) {HDF_LOGE("%s: close device failed, ret: %d", __FUNCTION__, ret);return ret;}return 0; }
最后
小编在之前的鸿蒙系统扫盲中,有很多朋友给我留言,不同的角度的问了一些问题,我明显感觉到一点,那就是许多人参与鸿蒙开发,但是又不知道从哪里下手,因为资料太多,太杂,教授的人也多,无从选择。有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
为了确保高效学习,建议规划清晰的学习路线,涵盖以下关键阶段:
鸿蒙(HarmonyOS NEXT)最新学习路线
该路线图包含基础技能、就业必备技能、多媒体技术、六大电商APP、进阶高级技能、实战就业级设备开发,不仅补充了华为官网未涉及的解决方案
路线图适合人群:
IT开发人员:想要拓展职业边界
零基础小白:鸿蒙爱好者,希望从0到1学习,增加一项技能。
技术提升/进阶跳槽:发展瓶颈期,提升职场竞争力,快速掌握鸿蒙技术
2.视频学习资料+学习PDF文档
HarmonyOS Next 最新全套视频教程
纯血版鸿蒙全套学习资料(面试、文档、全套视频等)
总结
参与鸿蒙开发,你要先认清适合你的方向,如果是想从事鸿蒙应用开发方向的话,可以参考本文的学习路径,简单来说就是:为了确保高效学习,建议规划清晰的学习路线
这篇关于鸿蒙Harmony实战开发:Touchscreen驱动器件硬件接口使用实例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




