本文主要是介绍细说MCU定时器模块的输入捕捉功能的实现方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、工程背景
二、建立工程
1、配置GPIO
2、选择时钟源和Debug
3、 配置定时器TIM1
4、 配置定时器TIM13
5、配置串口
6、配置中断
7、配置系统时钟
三、代码修改
1、使能TIM1输入捕捉功能和TIM3的PWM输出功能
2、自定义变量
3、重定义回调函数
4、输出到串口
四、查看结果
五、测量脉冲宽度
一、工程背景
文章依赖的硬件及工程配置参考本文作者的其他文章:细说ARM MCU的串口接收数据的实现过程-CSDN博客 https://wenchm.blog.csdn.net/article/details/139541112
定时器的输入捕捉功能可以用于计算两个脉冲边沿之间的时间差值。这通常是通过输入捕捉中断来实现的。在第一个脉冲边沿时,产生一次中断,记录当前计数器的计数值;在随后一个边沿时刻,也记录一下计数值;这两个记录值的差值,换算成时间间隔,就是两次脉冲边否之间所经过的时间。在信号为周期性脉冲的情况下,如果两个边沿类型是一致的,譬如均为上升沿或下降沿,则记录的时间就是脉冲信号的周期时间;如果两个边沿的类型不同,如分别为上升沿和下降沿,则记录的就是脉冲的宽度。
本例中,使用TIM1的定时器的输入捕捉功能,同样涉及通道问题,这一点与PWM输出功能类似。TIM1有四个通道,本例使用通道2(TIM1_CH2)作为输入捕捉通道。TIM1_CH2可以映射到PA9/PC1引脚,本例中使用PC1引脚,在NUCLEO-G474RE板上,该引脚经由CN7端子的第36引脚引出。
使用TM3_CH1作为本里的信号源输出,使用PB4引脚。
此外,为了显示记录的时间值使用串口模块USART2,通过串口将计算的时间值发送到串口通讯助手上。
二、建立工程
1、配置GPIO
配置PC1为TIM1_CH2的信号输入引脚。配置PB4为TIM3_CH1的信号输出引脚。TIM3_CH1输出的信号输入给TIM1_CH2。PC1和PB4的其它参数选作Pull_up,High。
2、选择时钟源和Debug
高速外部时钟(HSE)选择Crystal/Ce-amic Resonator,使用片外时钟晶体作为HSE的时钟源。最后,在SYS中将Debug设置为Serial Wire。
3、 配置定时器TIM1
时钟源(Clock Source)选择Internal Clock,通道2(Channel 2)的参数选择Input Capture direct mode;预分频因子(Prescaler)和计数器周期(Counter Period)分别设置为16999和65535,计数模式(Counter Mode)设置为升模式(Up),并且使能自动重载(auto-reload preload)。
计数器的预分频因子决定着计数器两次计数之间的时间间隔,时钟频率为170 MHz,预分频因子为16999,则两次计数(16999+1)/170×106=100(us)。由于两次计数的时间间隔是100 μs,所以当计数周期为65535时,能记录的最长时间为(65535+1)×100 μs,约6.55 s。
其它参数配置,边沿极性选择上升沿(Rising Edge),捕捉选择(IC Selection)选择Direct,预分频比率(Prescaler Division Ratio)选择不分频(Nodivision)。预分频比率这个参数可以设置多次事件触发一次捕捉,选择No division,意思就是来一个边沿就触发一次捕捉。最后一个参数为输入滤波器(Input Filter),这个参数是为了抗干扰用的,在这个例子中暂不使用,设置为0。
4、 配置定时器TIM13
将时钟源设置为Internal Clock;选择PWM Generation CH1。然后,将预分频因(Prescaler)和计数器周期(Counter Period)分别设置为999和8499(这两个参数从0开始计数),计数模式(Counter Mode)设置为升模式(Up),并使能自动重载(auto-reload preload)。
预分频因子决定着两次计数之间的时间间隔,这里设置的1000(999+1),是将时钟脉冲分频1000倍。假如时钟频率为170 MHz,则分频1000倍后就是170 kHz。
将计数周期设置为8499,也就是计数到8499后,重新从0开始计。在计数频率170 kHz之下,计数器的周期为(1/170×10³)×8500≈50(ms),对应的频率为20 Hz。在PWM Generation Channel 1的参数配置中,选择PWM mode 1,脉冲数(Pulse)设置为4250(该参数从1开始),通道极性设置为High。通道极性参数用于指定在Pulse个计数期间,输出的是高电平还是低电平。这里脉冲数Pulse决定着占空比,这里设为4250,是计数器周期的1/2,所以占空比刚好为50%。
5、配置串口
在USART2的模式(Mode)区中选择Asynchronous;在下面的配置(Configuration)区中,展开的参数设置(Parameter Settings)选项卡,保持默认值即可(波特率为115200),数据位8停止位1,奇偶校验无;设置USART2的两个引脚PA2和PA3的参数。由于本例中只是通过串口发送数据,无需使用串口的中断功能,所以不用设置串口中断。其它参数,选择Pull_up,High。
6、配置中断
TIM1 capture compare interrupt出现在中断表中,并且已使能,将它的抢占式优先级设为1,响应优先级设为0。
TIM3 global interrupt出现在中断表中,将其使能,将它的抢占式优先级设为1,响应优先级设为0。
7、配置系统时钟
将系统时钟(SYSCLK)频率配置为170 MHz。
三、代码修改
配置完成后,保存,并启动代码自动生成。
1、使能TIM1输入捕捉功能和TIM3的PWM输出功能
在主程序初始化时开启TIM1通道2的输入捕捉中断。开启该中断可以通过调用函数HAL_TIM_IC_Start_IT()来实现。
还要使能TIM3通道1的PWM输出。使用库函数HAL_TIM_PWM_Start()。
把它们放到main函数中,while(1)之前、TIM1初始化函数MX_TIM1_Init()之后的注释对中:
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
/* USER CODE END 2 */2、自定义变量
由于要记录两次发生捕捉中断时刻计数器的值,所以需要定义四个变量:存放两次计数值及它们之间的差值的变量,以及一个计数标志用的变量。将这些变量定义为全局变量,放置到main.c中的一个注释对中。对这些变量的定义如下:
/* USER CODE BEGIN PV */
uint16_t ICValue1 = 0; //存放第一个计数�??
uint16_t ICValue2 = 0; //存放第二个计数�??
uint16_t DiffICValue = 0; //存放两个计数值之�?
uint8_t CaptureIndex = 0; //计数标志
/* USER CODE END PV */3、重定义回调函数
定时器输入捕捉中断的回调函数如下:
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)这个函数在stm32g4xx_hal_tim.c中是以弱函数的形式被定义的,实际是一个空函数,所以要在main.c中重新定义它。
下面给出回调函数的具体实现:
/* USER CODE BEGIN 4 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2){if(CaptureIndex == 0){/*记录第一个计数值 */ICValue1 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2);CaptureIndex = 1;}else if(CaptureIndex ==1){/*记录第二个计数值 */ICValue2 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2);/*计算两次计数值之值 */if(ICValue2 > ICValue1)DiffICValue =(ICValue2 - ICValue1);else if(ICValue2 < ICValue1)DiffICValue = ((0xFFFF -ICValue1) + ICValue2) +1;printf("Time =%d ms\r\n",DiffICValue/10);CaptureIndex = 0;}}
}int __io_putchar(int ch)
{HAL_UART_Transmit(&huart2,(uint8_t *)&ch,1,0xFFFF);return ch;
}
/* USER CODE END 4 */用了一条用于串口发送的printf语句:
printf("Time =%d ms\r\n",DiffICValue/10);DiffICValue是两次计数值之差为50ms。
4、输出到串口
由于用到了printf函数,所以需要添加相关代码。对main.c做如下几处修改:
首先,将stdio.h包含进来。可以将它放到main.c前面的一个注释对中, 其次,给出putchar函数的定义。可以将它与回调函数HAL_TIM_IC_CaptureCallback放到同一注释对中:
int __io_putchar(int ch)
{HAL_UART_Transmit(&huart2,(uint8_t *)&ch,1,0xFFFF);return ch;
}四、查看结果
把开发板上的PB4和PC1用杜邦线连接起来,PB4是信号源,PC1开始边沿捕捉。
图为示波器检测到的PB4信号 ,频率20Hz、周期50ms,占空比50%。

串口助手收到的信号周期数值=相邻两个上升沿的数值差。
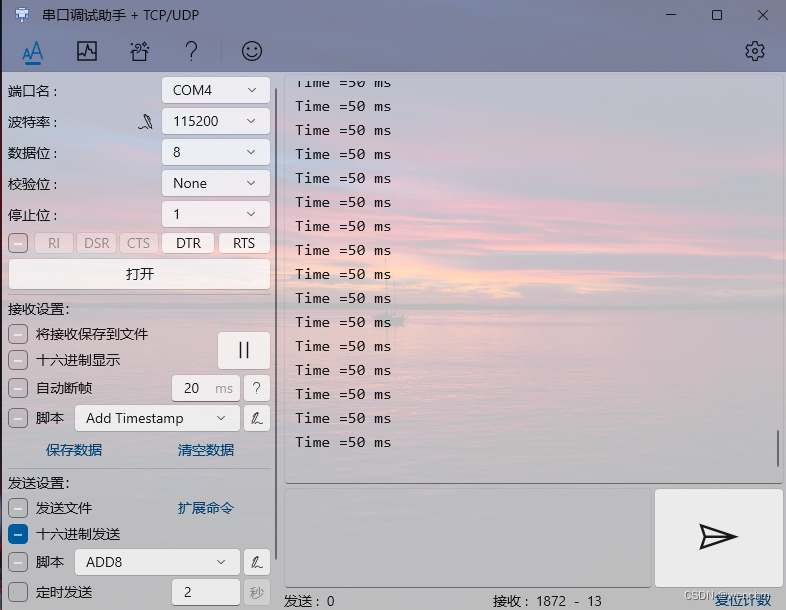
五、测量脉冲宽度
如果要测量脉冲宽度或者观察占空比的变化,可以在输入捕捉通道(Input Capute Chan-
nel 2)的参数配置中将边沿极性选择(Polarity Selection)参数修改为上升/下降沿(Both Edges)。保存文件、重新生成代码。编译下载并运行。
此时串口接收到的数据就是脉冲宽度了。
这篇关于细说MCU定时器模块的输入捕捉功能的实现方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





