本文主要是介绍Fluent固体运动的设置方法(1),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 概述
固体运动是某些CFD问题中必须要考虑的因素,如风扇的旋转。相关问题可分类如下:
| 问题类型 | 是否为刚体 | 运动规律是否已知 |
|---|---|---|
| 无特定称呼 | Y | Y |
| 六自由度运动问题 | Y | N |
| 流固耦合问题 | N | N |
在 Fluent 中,有多种方法表征固体运动,包括:
- MRF(multiple reference frame,多重坐标系)
- 滑移网格(sliding mesh)
- 动网格(dynamic mesh)
- 重叠网格(overset mesh)
本文作为第一部分,仅讲述 MRF 和滑移网格的设置。动网格和重叠网格部分另外讲述。
2 应用场景
MRF和滑移网格方法通常应用于绕轴旋转、平动等运动规律简单的问题,工程中以绕轴旋转应用较多。
MRF方法可支持稳态仿真和瞬态仿真,滑移网格方法仅支持瞬态仿真。
3 网格划分
计算域通常计算域包括静止域和运动域两个部分。运动域指运动固体附近区域被单独分割出来的区域,静止域为计算域剩余部分。
离心机等整体运动的场景,可将整个计算域作为运动域,无需对静止域建模。
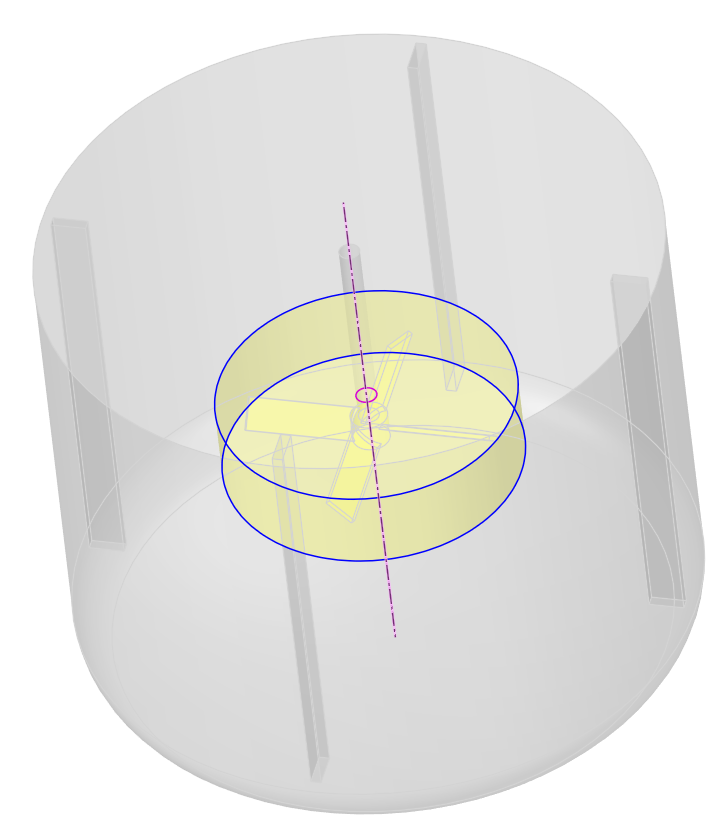
如图所示搅拌器模型,黄色部分为搅拌器叶片附近的区域被单独切割出来作为旋转域,灰色部分为静止域。
4 计算设置
4.1 MRF设置
在Fluent中,需要在运动域设置面板勾选“frame motion”选项,并设置运动规律。

旋转的定义需要同时定义旋转轴和转速。
旋转轴是三维空间的直线,其定义需要方向向量和经过的点两类信息。方向向量在“rotation-axis direction”部分设置,其可以为任意长度的向量,如(0,0,1)和(0,0,2)对于定义旋转轴方向是等效的。经过的点在“rotation-axis origin”部分设置,可以为旋转轴上的任意点。
旋转方向采用右手螺旋法则确定,旋转轴的方向向量符号对旋转方向有影响。例如,(0,0,1)和(0,0,-1)所表示的旋转方向是相反的。
由于MRF方法不涉及网格变化,无需额外设置旋转域和静止域区域之间的网格交界面,可直接使用共节点网格。
4.2 滑移网格设置
在 Fluent 中,需要在运动域设置面板勾选“mesh motion”选项,并设置运动规律。
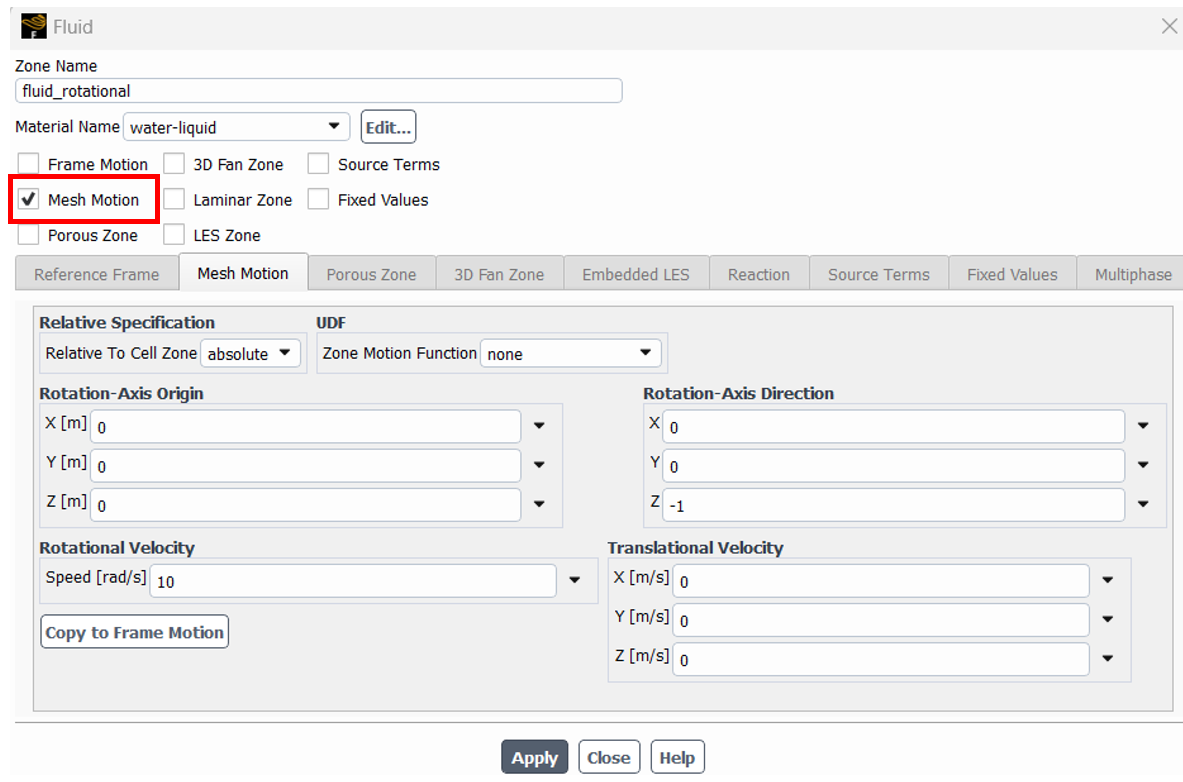
面板上运动规律的设置内容和MRF相同。
由于运动域网格随时间变化,需要创建网格交界面(mesh interface)以进行数据插值,且不可使用共节点网格。
对已有的MRF设置,Fluent命令“mesh/modify-zones/mrf-to-sliding-mesh”可自动转换为滑移网格设置。

4.3 边界条件设置
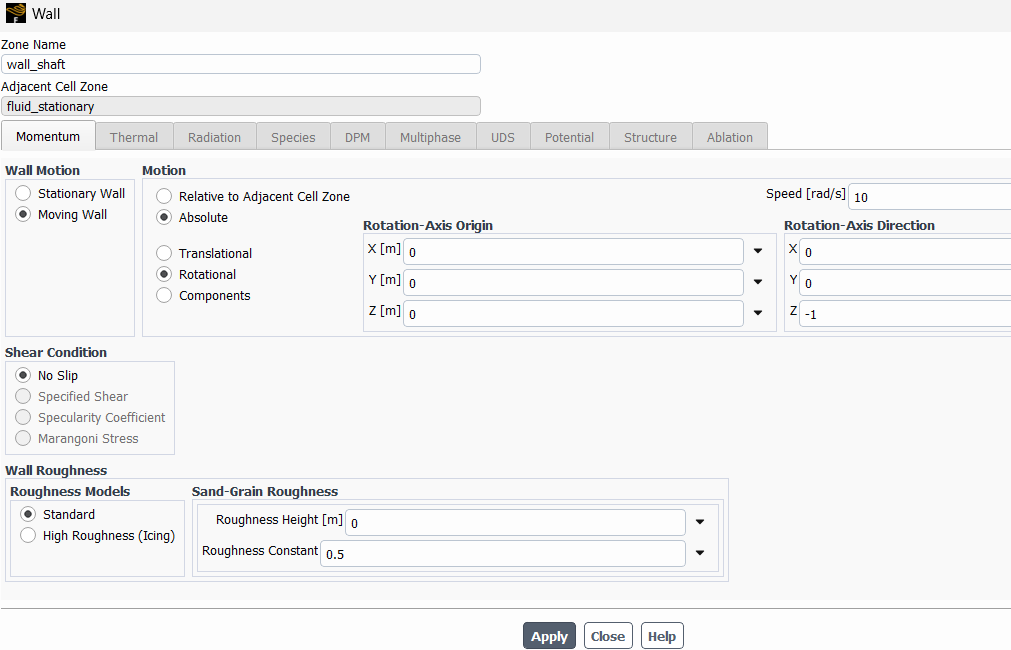
Fluent中默认的壁面边界条件为无滑移边界条件,且相对于从属的区域静止,不是绝对静止。默认设置中,壁面的边界速度由区域的运动规律设置决定。
由于几何特征限制等原因,很难保证各个壁面和所属区域的运动规律相同。对于部分壁面需要单独设置运动速度,使其和物理实际一致。
在设置界面,建议壁面的运动规律基于绝对坐标系定义,避免出错。
5 后处理
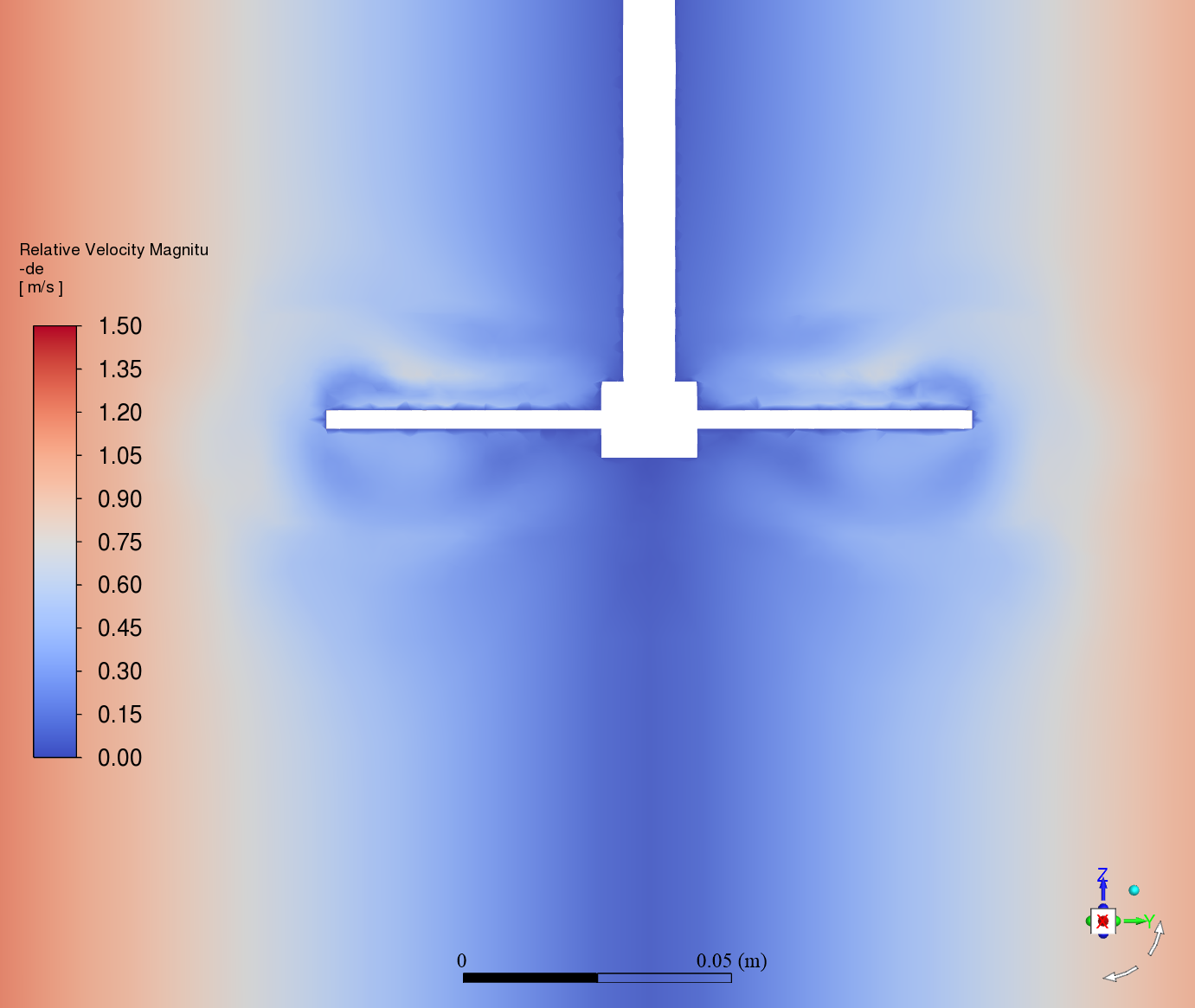
后处理中,Fluent速度可分为绝对速度和相对速度两类。速度的参考系为绝对坐标系,相对速度的参考系为运动坐标系。两者对比如图所示。

6 MRF和滑移网格的区别
低转速下,MRF和滑移网格计算结果较接近,转速越高两者偏差越大。
若需要获得精确结果和流动特征的周期性波动规律,可先用MRF运行稳态仿真获得初步结果,再用滑移网格运行瞬态仿真,且MRF的稳态结果作为瞬态仿真初始条件。
这篇关于Fluent固体运动的设置方法(1)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






