本文主要是介绍测试记录4:在windows wsl2上配置ubuntu20.04,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.下载ubuntu20.04
(1) 在microsoft store中下载ubuntu20.04
(2) 在powershell中检查ubuntu20.04
wsl --list

wsl -l -v

安装成功
2.安装界面
见测试记录3
3.安装必要的功能包
sudo apt install zip
sudo apt install gedit
出现问题: Command: xacro /home/buaa/Test_code/test05_gazeboSelecting previously unselected package ros-foxy-xacro.hare/my_robot_description/urdf/my_robot.urdf.xacro
解决:sudo apt install ros-foxy-xacro
出现问题failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'
解决: sudo apt install ros-foxy-joint-state-publisher-gui
4.安装ros2
wget http://fishros.com/install -O fishros && . fishros
5.安装IPOPT和Casadi
见测试记录1
6.安装QT creator和Qt5
(1)安装qt5组件
sudo apt-get install build-essential
sudo apt-get install qtbase5-dev qtchooser qt5-qmake qtbase5-dev-tools
sudo apt-get install qt5*
(2)下载在线安装包
https://www.qt.io/download-qt-installer-oss?hsCtaTracking=99d9dd4f-5681-48d2-b096-470725510d34%7C074ddad0-fdef-4e53-8aa8-5e8a876d6ab4
登录账号,选择QT Creator 13.0.2、 CMake、 Ninja 1.12.0
若出现问题

运行下面的命令
sudo apt-get install -qq libglu1-mesa-dev libx11-xcb-dev '^libxcb*'
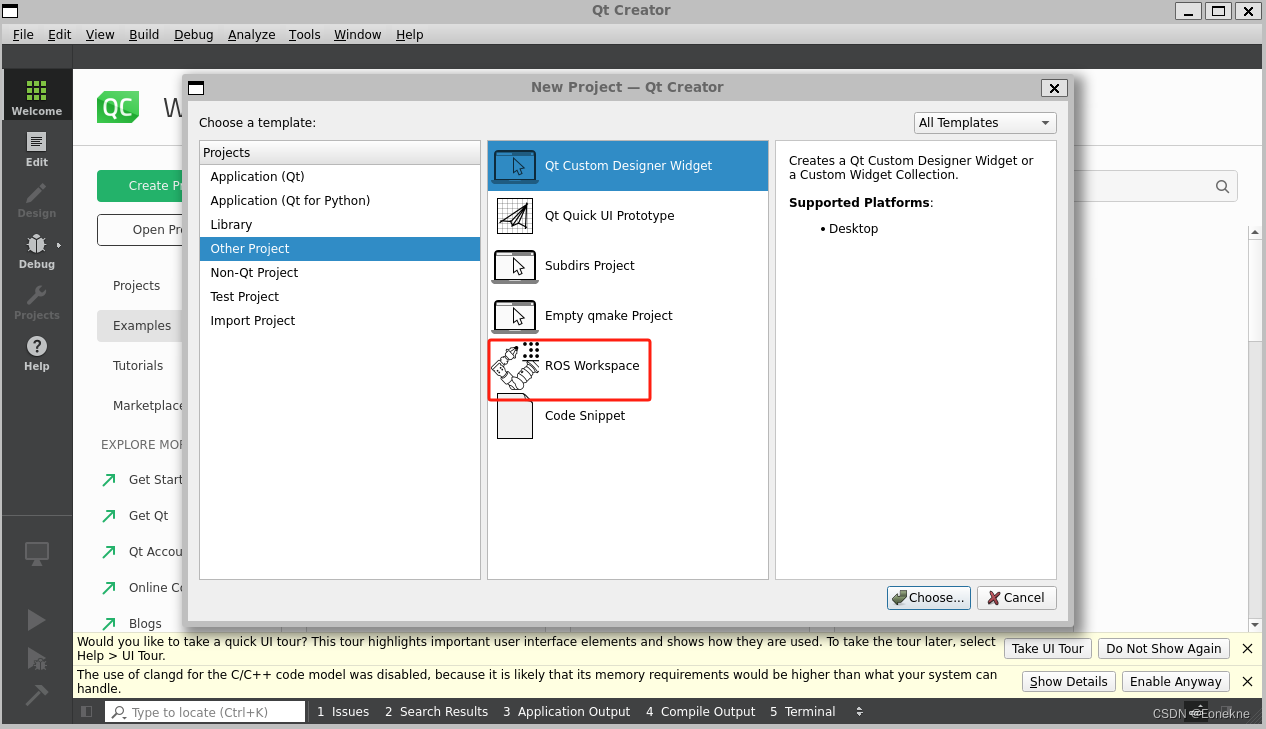
(3)安装ros插件
下载插件
https://github.com/ros-industrial/ros_qtc_plugin/releases
安装插件
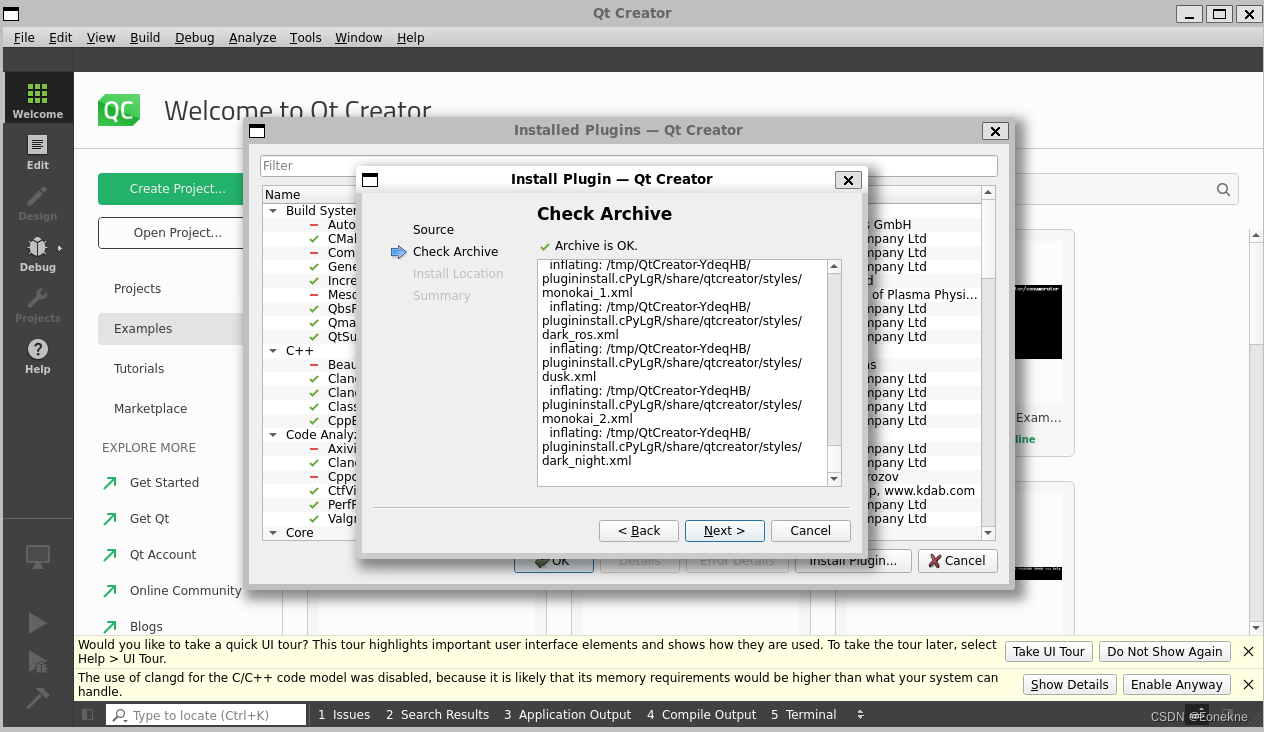
重启,安装成功
安装qchart
sudo apt install libqt5charts5 libqt5charts5-dev
这篇关于测试记录4:在windows wsl2上配置ubuntu20.04的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







