本文主要是介绍【GD32F303红枫派使用手册】第九节 RTC-万年历实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
9.1 实验内容
通过本实验主要学习以下内容:
- RTC简介
- RTC复位
- RTC实现万年历
- RTC使用注意事项
9.2 实验原理
9.2.1 RTC简介
RTC(Real Time Clock)——实时时钟定时器,可以用作日历。RTC 电路分两个电源域部分,其一位于备份域中,该部分包括一个 32 位的累加计数器、一个闹钟、一个预分频器、一个分频器以及RTC时钟配置寄存器。备份域这部分电路不会因为系统复位或者MCU进入低功耗而丢失数据,所以在系统复位或MCU从低功耗下唤醒,RTC 的设置和时间都可以保持不变。另一部分位于VDD 电源域中,该部分只包括 APB 接口以及一组控制寄存器。
| 关于RTC的两个电源域及分布在两个电源域中的内容,需要读者牢记,否则会由于细节没处理好导致RTC工作异常。 |
以下为GD32F303的RTC框图:
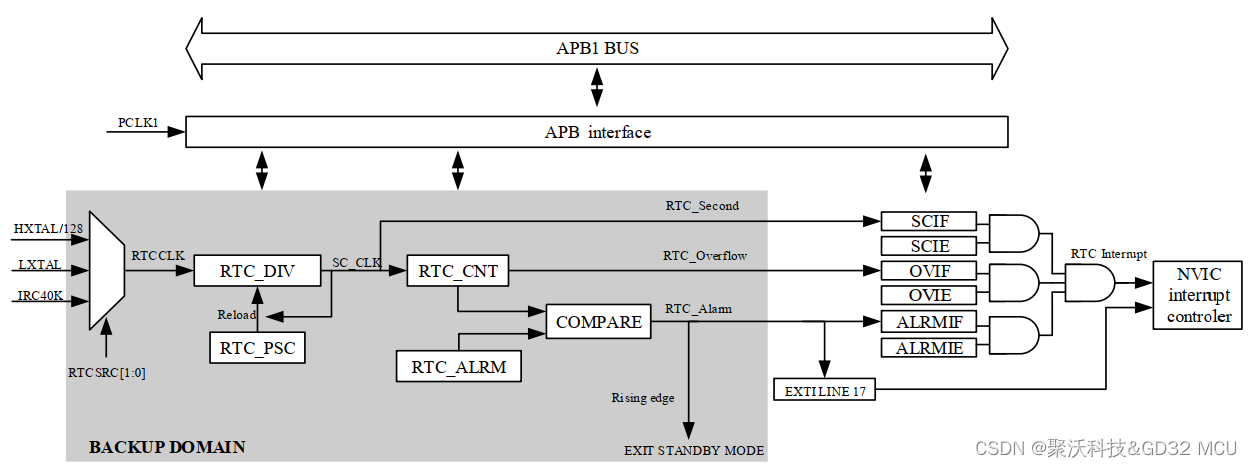
图中RTC_CNT为计数值,每个SC_CLK时钟到来时,这个计数值增加+1。SC_CLK时钟源有三个:LXTAL(外部低速晶振)、IRC40K(内部40K晶振)和HXTAL/128,三个时钟源经过RTC_DIV产生SC_CLK。RTC_DIV的配置是通过RTC_PSC加载所得,RTC_PSC由寄存器RTC 预分频寄存器高位 (RTC_PSCH)和RTC 预分频寄存器低位 (RTC_PSCL)配置,有效位20bit,即RTC的时钟分频器最大值为2的20次方,完全足够应用了。
了解了上面的内容,RTC的工作原理就很好理解了。举个例子,RTC的时钟源选择LXTAL,频率为32.768KHz,然后设置RTC_PSC为32768,那么SC_CLK即为1Hz,也就是说,每秒钟RTC_CNT值+1,所以我们只要获得一段时间内RTC_CNT值增加了多少数,也就知道经过了多少秒。
我们从手册中可以看到RTC_CNT由RTC 计数寄存器高位 (RTC_CNTH)和RTC 计数寄存器低位 (RTC_CNTL)设置,这两个寄存器组合起来的有效位为32bit,即RTC_CNT可以记录2的32次方,即4,294,967,296个数,按照每秒增加一次的话,可以记录136多年,
除了基础的记时间的功能,RTC还有一个闹钟功能,RTC运行时,当RTC_CNT的值增加到和RTC_ALRM(由RTC 闹钟寄存器高位 (RTC_ALRMH)和RTC 闹钟寄存器低位 (RTC_ALRML)设置)相等时,则会产生ALRM中断,当然,程序中需要实现使能ALARM中断(ALRMIE)。
RTC还有另外两个中断,一个是秒中断,另一个是溢出中断。秒中断好理解,即每秒钟进入一个中断;溢出中断则是当RTC_CNT溢出时产生中断。
9.2.2 RTC复位
这里把RTC的复位单独作为一个章节来说,是因为这里很容易出错导致想要实现的功能无法实现。
前面说过,RTC分为两个电源域——备份域和VDD电源域,而一般的复位比如NRST脚复位、软件复位等只能复位VDD和VDDA电源域 ,而无法复位备份域;备份域复位需要VBAT掉电或者通过备份域控制寄存器( RCU_BDCTL)的BKPDRST来进行备份域复位。
上节中的RTC框图中被深色框住的即属于备份域,这里提到一个很容易出错的地方,即RTC的时钟源选择。从框图看到时钟源由RTCSRC[1:0]来设置,这个位域属于备份域控制寄存器( RCU_BDCTL)。
备份域控制寄存器( RCU_BDCTL):
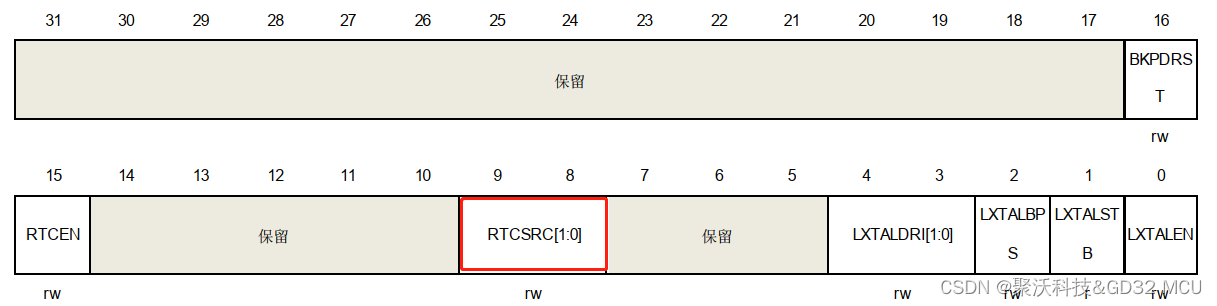

寄存器描述中指出,一旦RTC的时钟源选择后,除了将备份域复位,否则时钟不能被改变。举个例子:一个产品选择LXTAL作为RTC时钟,但可能因为某些原因LXTAL停振了,需要将时钟源切换到IRC40K,程序如何实现呢?没错,需要复位备份域(控制BKPDRST位)才能重新选择时钟源,但一旦备份域进行了复位,包括RTC_CNT等数据都会丢失,所以在备份域复位前需要对RTC内的各个数据进行保存处理,待备份域复位后再重新写入。
9.2.3 RTC实现万年历
本实验用RTC做一个万年历,其中还需要考虑到闰年闰月的情况。实验设置的基准时间是1970年,即当RTC_CNT为0时,为1970年,实验最高可记录到2106年(1970+136)。
9.3 硬件设计
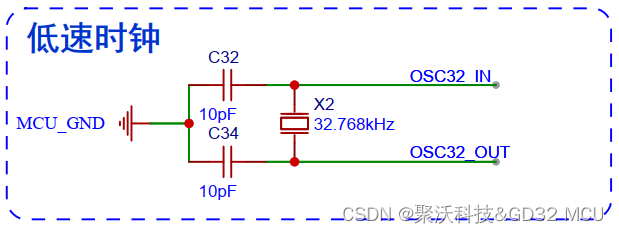
本实验实现每秒钟通过串口打印实时时间,即需要使用到开发板USB串口模块。另外RTC时钟源使用的是外部低速晶振,外部晶振原理图如下:
9.4 代码解析
9.4.1 RTC配置
在driver_rtc.c中定义了RTC配置函数rtc_configuration
C
void rtc_configuration(void)
{/*使能备份域和PMU时钟*/rcu_periph_clock_enable(RCU_BKPI);rcu_periph_clock_enable(RCU_PMU);/*使能备份域写功能*/pmu_backup_write_enable();/*备份域复位*/bkp_deinit();/*依据选择的时钟源进行时钟配置*//*使用LXTAL*/#ifdef RTC_CLOCK_SOURCE_LXTAL/* 使能 LXTAL */rcu_osci_on(RCU_LXTAL);/* 等待LXTAL Ready */rcu_osci_stab_wait(RCU_LXTAL);/*选择LXTAL作为RTC时钟*/rcu_rtc_clock_config(RCU_RTCSRC_LXTAL);#endif/*使用IRC40K*/#ifdef RTC_CLOCK_SOURCE_IRC40K/* 使能 IRC40K*/rcu_osci_on(RCU_IRC40K);/* 等待IRC40K Ready */rcu_osci_stab_wait(RCU_IRC40K);/*选择IRC40K作为RTC时钟*/rcu_rtc_clock_config(RCU_RTCSRC_IRC40K);#endif#ifdef RTC_CLOCK_SOURCE_HXTAL_DIV_128/* 使能LXTAL */rcu_osci_on(RCU_HXTAL);/* 等待HXTAL Ready */rcu_osci_stab_wait(RCU_HXTAL);/*选择HXTAL/128作为RTC时钟*/rcu_rtc_clock_config(RCU_RTCSRC_HXTAL_DIV_128);#endif/*使能RTC时钟*/rcu_periph_clock_enable(RCU_RTC);/*等待RTC寄存器同步*/rtc_register_sync_wait();/*等待上一次操作完成*/rtc_lwoff_wait();/*使能RTC秒中断*/rtc_interrupt_enable(RTC_INT_SECOND);/*等待上一次操作完成*/rtc_lwoff_wait();/*依据选择的时钟源来设置分频,使RTC周期为1s*/#ifdef RTC_CLOCK_SOURCE_LXTALrtc_prescaler_set(32767);#endif#ifdef RTC_CLOCK_SOURCE_IRC40Krtc_prescaler_set(40000);#endif#ifdef RTC_CLOCK_SOURCE_HXTAL_DIV_128rtc_prescaler_set(HXTAL_VALUE/128);#endif/*等待上一次操作完成*/rtc_lwoff_wait();
}时钟源通过driver_rtc.h中的宏定义来选择:
C
#define RTC_CLOCK_SOURCE_LXTAL
//#define RTC_CLOCK_SOURCE_IRC40K
//#define RTC_CLOCK_SOURCE_HXTAL_DIV_128 9.4.2 万年历实现
在bsp_rtc.c中定义了实现万年历的几个函数:rtc_time_set、rtc_time_display、is_leap_year等。
rtc_time_set函数——第一次需要手动设置当前时间:
C
uint32_t rtc_time_set(uint16_t year, uint8_t month, uint8_t day, uint8_t hour, uint8_t minute, uint8_t second)
{uint16_t t;uint32_t seccount = 0;if (bkp_read_data(BKP_DATA_0) != 0xA5A5){rtc_configuration();if(year < 1970 || year > 2099)return 1;for(t = 1970; t < year; t++){if(is_leap_year(t)){seccount += 31622400;}else{seccount += 31536000;}}month -= 1;for(t=0; t < month; t++){seccount += (uint32_t)month_table[t] * 86400; if(is_leap_year(year) && t==1){seccount+=86400;}} seccount += (uint32_t)(day-1) * 86400;seccount += (uint32_t)hour * 3600;seccount += (uint32_t)minute * 60;seccount += second;rtc_counter_set(seccount);bkp_write_data(BKP_DATA_0, 0xA5A5);return 0;}else{if (rcu_flag_get(RCU_FLAG_PORRST) != RESET){printf("Power On Reset occurred....\r\n");}else if (rcu_flag_get(RCU_FLAG_EPRST) != RESET){printf("External Reset occurred....\r\n");}rcu_all_reset_flag_clear();rcu_periph_clock_enable(RCU_PMU);pmu_backup_write_enable();rtc_register_sync_wait();rtc_interrupt_enable(RTC_INT_SECOND);rtc_lwoff_wait();return 0;}
}该函数中在第一次上电运行时,会进行初始时间设置,然后写入特定数据到备份域数据寄存器中。当发生系统复位但Vbat未掉电的情况下,则不会重新进行时间设置,但需要重新开启秒时钟中断,因为SCIE处于VDD电源域而不在备份域。
rtc_time_display函数——打印实时时间:
C
void rtc_time_display(uint32_t timevar)
{ static uint16_t daycnt = 0;uint32_t temp = 0;uint16_t temp1 = 0;temp = timevar / 86400;if(daycnt != temp) {daycnt = temp;temp1 = 1970;while(temp >= 365){if(is_leap_year(temp1)){if(temp >= 366)temp-=366;else break;}else temp -= 365;temp1++;}calendar.years = temp1;temp1=0;while(temp >= 28){if(is_leap_year(calendar.years) && temp1 == 1){if(temp >= 29)temp -= 29;elsebreak;}else{if(temp >= month_table[temp1])temp -= month_table[temp1];elsebreak;}temp1++;}calendar.months = temp1 + 1;calendar.days = temp + 1;}temp = timevar % 86400;calendar.hours = temp / 3600;calendar.minutes = (temp % 3600) / 60; calendar.seconds = (temp % 3600) % 60; printf("Time: %0.4d-%0.2d-%0.2d,%0.2d:%0.2d:%0.2d\r\n", calendar.years, calendar.months, calendar.days, calendar.hours, calendar.minutes, calendar.seconds);
}is_leap_year函数——判断当前年是否为闰年:
C
uint8_t is_leap_year(uint16_t year)
{if((year%4 == 0 && year % 100 != 0) || (year % 400 == 0)){return 1;}else{return 0;}
}9.4.3 main函数和中断函数实现
以下为main函数代码:
C
int main(void)
{delay_init();//delay函数初始化bsp_uart_init(&BOARD_UART);//BOARD_UART串口初始化nvic_irq_enable(RTC_IRQn,1,0);//打开RTC的NVICrtc_time_set(year_set,month_set,day_set,hour_set,minute_set,second_set); //设置当前时间while (1){/* 判断是否到1s了*/if (timedisplay == 1){/* 显示实时时间*/rtc_time_display(rtc_counter_get());timedisplay = 0;}}
}本例程main函数首先进行了延时函数初始化,再初始化开发板USB串口,开启RTC的NVIC后设置了当前时间,在while(1)循环中等待RTC数据更新,然后将实时时间打印出来。
中断函数代码:
C
void RTC_IRQHandler(void)
{if (rtc_flag_get(RTC_FLAG_SECOND) != RESET){/* 清除RTC秒中断标志位*/rtc_flag_clear(RTC_FLAG_SECOND);timedisplay = 1;/* 等待上一次操作完成 */rtc_lwoff_wait();}
}
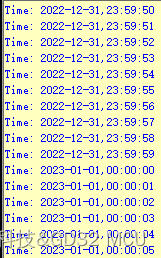
9.5 实验结果
为了验证万年历是否工作正常,设定初始时间为2022年12月31日23时59分50s,当程序开始运行时,每秒钟打印时间,经过10s后,可以看到时间变为2023年1月1日0时0分0秒,说明万年历有效。
由聚沃科技原创,来源于 【红枫派开发板】第九讲 RTC-万年历实验 - 苏州聚沃电子科技有限公司 (gd32bbs.com)
GD32MCU技术交流群:859440462
这篇关于【GD32F303红枫派使用手册】第九节 RTC-万年历实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









