本文主要是介绍ros2笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ros2
- hello world c++
- create package
- helloworld.cpp
- hello world python
- helloworld.py
- file explain
- ros2 cmd
- create
- build
- find
- run
- install
- interfaces
- msg file
- srv file
- action file
- Topic
hello world c++
mkdir -p {your workspace name}/src
cd {your workspace name} #进入工作空间
colcon build #编译
create package
in {your workspace name}/src
ros2 pkg create {your package name} --build-type ament-cmake --dependencies rclcpp --node-name helloworld
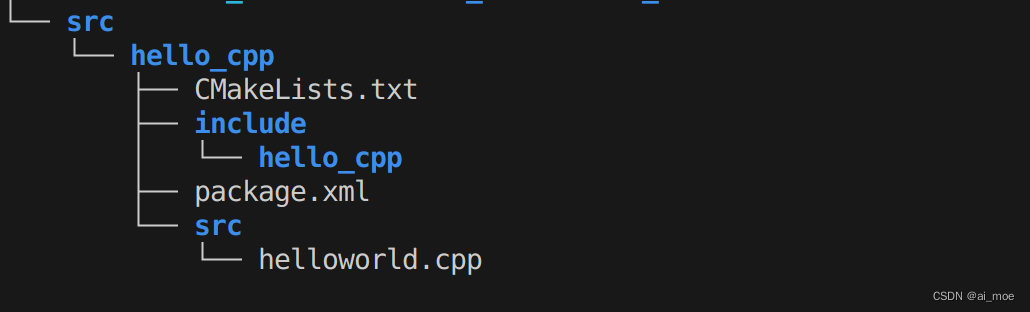
helloworld.cpp
#include "rclcpp/rclcpp.hpp"int main(int argc,char ** argv)
{rclcpp::init(argc,argv);auto node = rclcpp::Node::make_shared("helloworld_node");RCLCPP_INFO(node->get_logger(),"hello world!");rclcpp::shutdown();return 0;
}
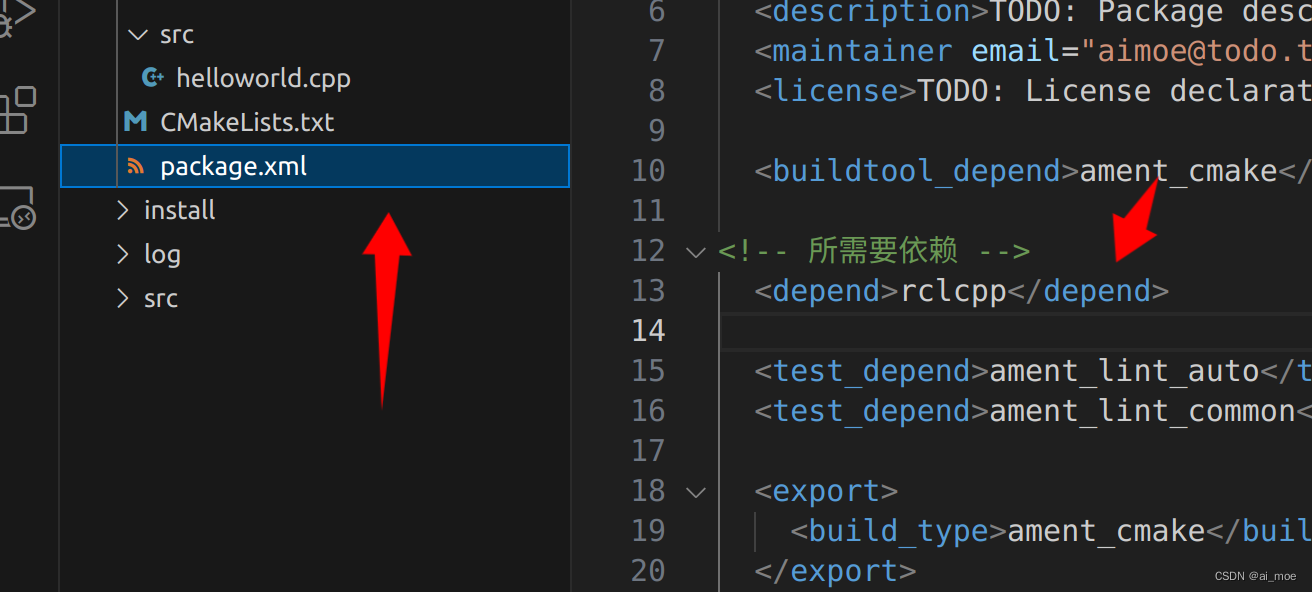
if you want to add some dependencies you can like this
this is CMakeLists 's explain
# 引入外部依赖包
find_package(rclcpp REQUIRED)
# 映射源文件与可执行文件
add_executable(helloworld src/helloworld.cpp)# 设置目标依赖库
ament_target_dependencies(helloworld"rclcpp"
)
# 定义安装规则
install(TARGETS helloworldDESTINATION lib/${PROJECT_NAME})build
in your workspace
colcon build
if you meet this situation
 you must use
you must use pip install catkin_pkg
pip swapping source
pip config set global.index-url --site https://pypi.tuna.tsinghua.edu.cn/simple
run
you must in your workspace
source ./install/setup.bash
ros2 run {your package name} {your node name}

hello world python
in {your workspace name}/src
ros2 pkg create {your package name} --build-type ament_python --dependencies rclpy --node-name {your node name}
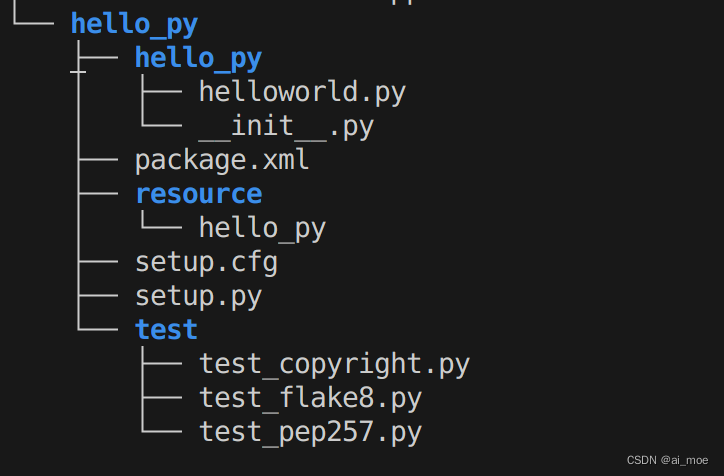
helloworld.py
import rclpydef main():rclpy.init();node = rclpy.create_node("hello")node.get_logger().info("hello python")rclpy.shutdown()if __name__ == '__main___':main()
setup.py
run
colcon build
. install/setup.bash
ros2 run {your paceage name} {your node name}
operational optimization
echo "source /{your work space path}/install/setup.bash" >> ~/.bashrc
file explain
WorkSpace --- 自定义的工作空间。|--- build:存储中间文件的目录,该目录下会为每一个功能包创建一个单独子目录。|--- install:安装目录,该目录下会为每一个功能包创建一个单独子目录。|--- log:日志目录,用于存储日志文件。|--- src:用于存储功能包源码的目录。|-- C++功能包|-- package.xml:包信息,比如:包名、版本、作者、依赖项。|-- CMakeLists.txt:配置编译规则,比如源文件、依赖项、目标文件。|-- src:C++源文件目录。|-- include:头文件目录。|-- msg:消息接口文件目录。|-- srv:服务接口文件目录。|-- action:动作接口文件目录。|-- Python功能包|-- package.xml:包信息,比如:包名、版本、作者、依赖项。|-- setup.py:与C++功能包的CMakeLists.txt类似。|-- setup.cfg:功能包基本配置文件。|-- resource:资源目录。|-- test:存储测试相关文件。|-- 功能包同名目录:Python源文件目录。|-- C++或Python功能包|-- launch:存储launch文件。|-- rviz:存储rviz2配置相关文件。|-- urdf:存储机器人建模文件。|-- params:存储参数文件。|-- world:存储仿真环境相关文件。|-- map:存储导航所需地图文件。|-- ......
c++ template
#include "rclcpp/rclcpp.hpp"class MyNode: public rclcpp::Node{
public:MyNode():Node("node_name"){RCLCPP_INFO(this->get_logger(),"hello world!");}};int main(int argc, char *argv[])
{rclcpp::init(argc,argv);auto node = std::make_shared<MyNode>();rclcpp::shutdown();return 0;
}
python template
import rclpy
from rclpy.node import Nodeclass MyNode(Node):def __init__(self):super().__init__("node_name_py")self.get_logger().info("hello world!")
def main():rclpy.init()node = MyNode() rclpy.shutdown()
package.xml
1.根标签
<package>:该标签为整个xml文件的根标签,format属性用来声明文件的格式版本。
2.元信息标签
<name>:包名;
<version>:包的版本号;
<description>:包的描述信息;
<maintainer>:维护者信息;
<license>:软件协议;
<url>:包的介绍网址;
<author>:包的作者信息。
3.依赖项
<buildtool_depend>:声明编译工具依赖;
<build_depend>:声明编译依赖;
<build_export_depend>:声明根据此包构建库所需依赖;
<exec_depend>:声明执行时依赖;
<depend>:相当于<build_depend>、<build_export_depend>、<exec_depend>三者的集成;
<test_depend>:声明测试依赖;
<doc_depend>:声明构建文档依赖。
CMakeLists.txt
# 引入外部依赖包
find_package(rclcpp REQUIRED)# 映射源文件与可执行文件
add_executable(helloworld src/helloworld.cpp)
# 设置目标依赖库
ament_target_dependencies(helloworld"rclcpp"
)
# 定义安装规则
install(TARGETS helloworldDESTINATION lib/${PROJECT_NAME})
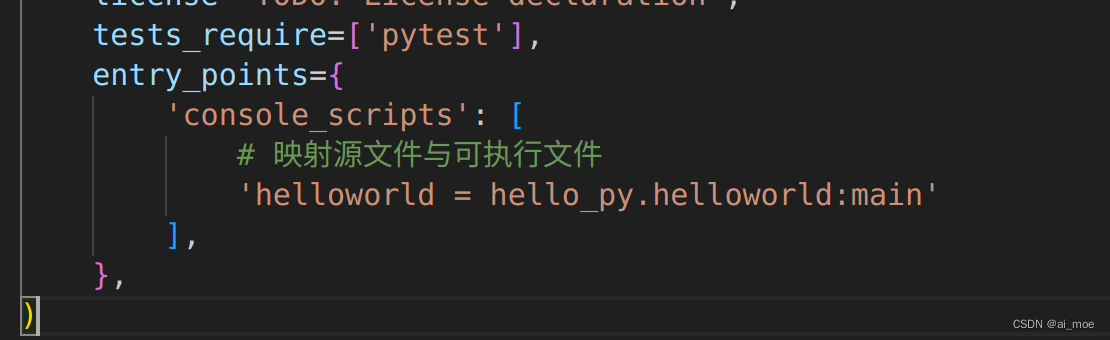
setup.py
from setuptools import setuppackage_name = 'pkg02_helloworld_py'setup(name=package_name, # 包名version='0.0.0', # 版本packages=[package_name], # 功能包列表data_files=[ #需要被安装的文件以及安装路径('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'], # 安装依赖zip_safe=True,maintainer='ros2', # 维护者maintainer_email='ros2@todo.todo', # 维护者 emaildescription='TODO: Package description', # 包描述license='TODO: License declaration', # 软件协议tests_require=['pytest'], # 测试依赖entry_points={'console_scripts': [# 映射源文件与可执行文件'helloworld = pkg02_helloworld_py.helloworld:main'],},
)
ros2 cmd
create
ros2 pkg create 包名 --build-type 构建类型 --dependencies 依赖列表 --node-name 可执行程序名称
格式解释:
–build-type:是指功能包的构建类型,有cmake、ament_cmake、ament_python三种类型可选;
–dependencies:所依赖的功能包列表;
–node-name:可执行程序的名称,会自动生成对应的源文件并生成配置文件。
build
build all
colcon build
build select
colcon build --packages-select 功能包列表
find
ros2 pkg executables [包名] # 输出所有功能包或指定功能包下的可执行程序。
ros2 pkg list # 列出所有功能包
ros2 pkg prefix 包名 # 列出功能包路径
ros2 pkg xml # 输出功能包的package.xml内容
run
ros2 run 功能包 可执行程序 参数
install
sudo apt install ros-ROS2版本代号-功能包名称
interfaces
msg file
int64 num1
int64 num2
srv file
int64 num1
int64 num2
---
int64 sum
upper part is used to declare request and the lower part is response
action file
int64 num
---
int64 sum
---
float64 progress
request response and feedback
Topic
ros2 pkg create cpp01_topic --build-type ament_cmake --dependencies rclcpp std_msgs base_interfaces_demo
ros2 pkg create py01_topic --build-type ament_python --dependencies rclpy std_msgs base_interfaces_demo
这篇关于ros2笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








