本文主要是介绍TPM仿真环境搭建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 背景及注意事项
- 一、CMake
- 二、m4
- 三、GNU MP Library
- 四、TPM_Emulator
- 五、TSS协议栈(trousers-0.3.14.tar.gz)
- 六、 tpm-tools
- 七、查看是否安装成功
- 八、测试 TPM环境(需要开三个终端分别运行)
- 8.1 启动TPM (第一个终端)
- 8.2 启动 tss 环境(第二个终端)
- 九、启动注意
- 9.1 启动过程
- 9.2 停止过程
背景及注意事项
宿主机系统:Windows10
虚拟机工具:VMware Workstation 16 pro
虚拟机系统:Ubuntu-18.04.6-desktop-amd64.iso
安装:CMake,m4,GNU MP Library,TPM_Emulator,TSS协议栈(toursers-0.3.14),tpm-tools
注意:在运行以下命令的过程中如果出现权限问题,尝试在命令前边添加sudo
一、CMake
- Ctrl+Alt+t 打开终端
- 使用命令
sudo apt-get install cmake安装CMake
二、m4
- 直接使用命令
sudo apt-get install m4安装即可
三、GNU MP Library
- 下载
gmp-6.3.0.tar.xz,官网:https://gmplib.org/#DOWNLOAD - 使用解压命令
tar -xf gmp-6.3.0.tar.xz进行解压,之后进入解压后的文件

- 依次执行下列命令
./configure
sudo make
sudo make check
sudo make install
4. 下载相关依赖
sudo apt-get update
sudo apt-get install flex
sudo apt-get install bison
sudo apt-get install m4



四、TPM_Emulator
- 下载网址:https://gitcode.com/PeterHuewe/tpm-emulator/overview?utm_source=csdn_github_accelerator&isLogin=1
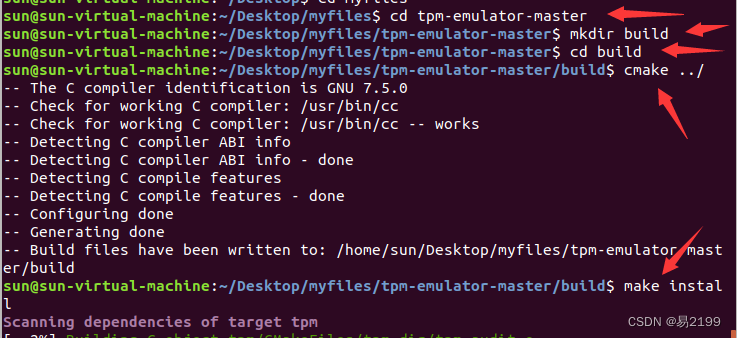
- 下载之后解压,拖到Ubuntu中,cd 到tmp目录下,执行以下命令
cd tmp-emulator-master/
mkdir build
cd build
cmake ../
make install (如果这个命令不行的话可以试试 sudo make install )
3. 初始化tpm-emulator,依次执行以下命令
tpmd deactivates
killall tpmd
tpmd clear
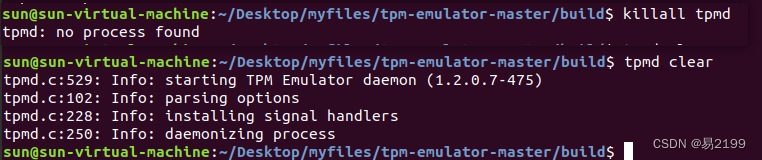
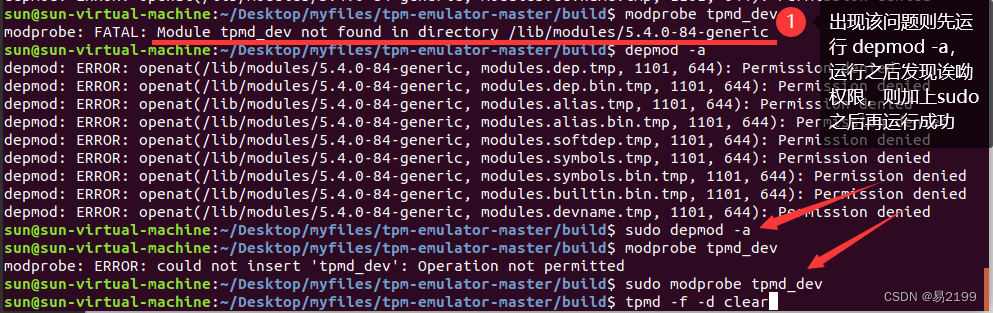
- 启动 tpm-emulator,下边代码中的小括号表示可选
(sudo)modprobe tpmd_dev
(sudo)tpmd -f -d clear
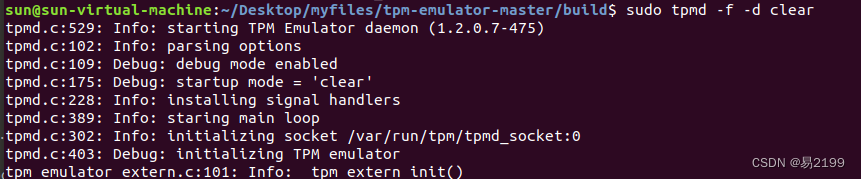
如果启动成功则显示:

如果出现 Module tpmd_dev not found ,则先运行命令:(sudo)depmod -a,其中小括号表示可选
五、TSS协议栈(trousers-0.3.14.tar.gz)
-
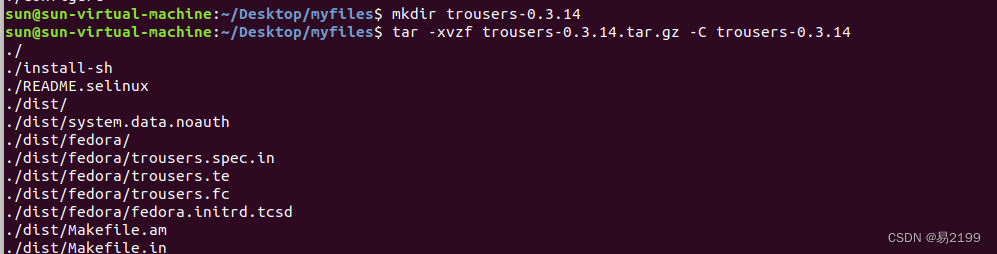
下载地址:https://sourceforge.net/projects/trousers/files/trousers/0.3.14/trousers-0.3.14.tar.gz/download
-
解压到指定目录
-
安装依赖
apt-get install automake
apt-get install autoconf
apt-get install pkgconf
apt-get install pkg-config
apt-get install libtool
apt-get install gtk2-engines
apt-get install openssl
apt-get install libssl-dev
apt-get install glibc-doc
4. 安装过程(首先需要进入trousers文件夹中),然后依次执行以下命令
sh ./bootstrap.sh
./config
make
make install
六、 tpm-tools
- 执行命令安装
sudo apt-get install tpm-tools
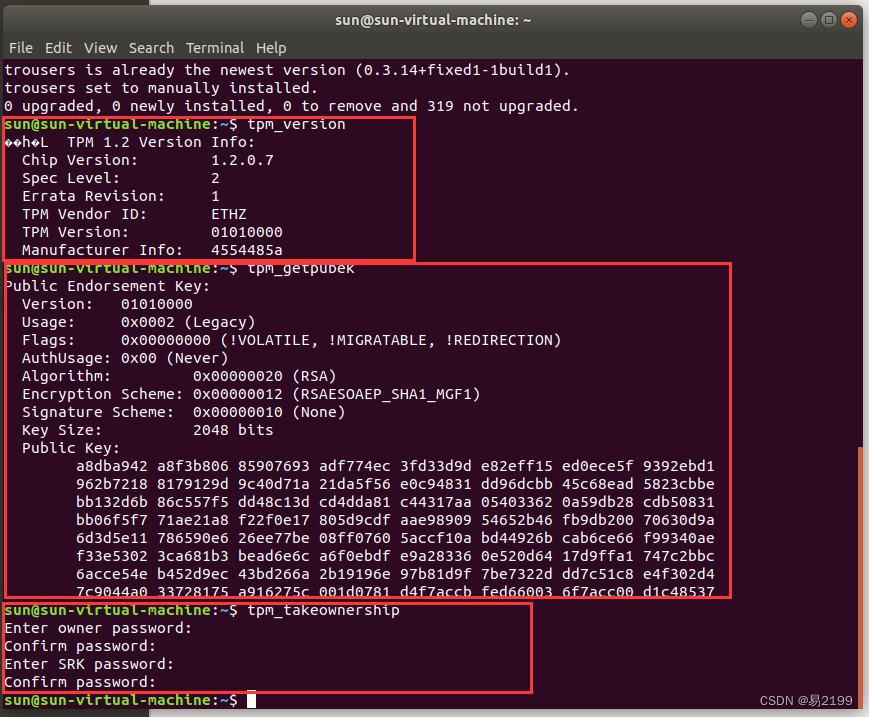
七、查看是否安装成功
tpm_version # 查看版本号
tmp_getpubek # 查看ek公钥
tpm_takeownership #获取owner
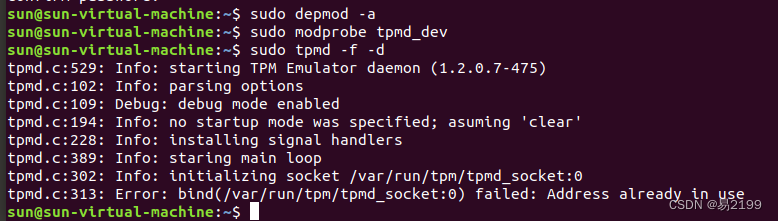
八、测试 TPM环境(需要开三个终端分别运行)
8.1 启动TPM (第一个终端)
sudo depmod -a
sudo modprobe tpmd_dev
sudo tpmd -f -d
- 已经启动了会出现下述提示
- 启动成功会出现以下界面
8.2 启动 tss 环境(第二个终端)
- 如果没有权限的话就在命令前边加上sudo
(sudo) tcsd -e -f
九、启动注意
9.1 启动过程
tpm -d -f save (如果是第一次启动,运行tpmd -d -f clear)
modprobe tpmd_dev
tcsd -e -f
9.2 停止过程
tpmd deactivated
killall tpmd
killall tcsd
rmmod tpm_dev
这篇关于TPM仿真环境搭建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








