本文主要是介绍Q-function Q函数 (维基百科),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
如有翻译或者理解上的错误烦请指出
Q函数
- 定义和基本特性
- 边界和近似
- 逆Q函数
- Q函数的值
- 高维度
- 多一嘴 Marcum Q函数
- MARCUM Q函数
- 高斯Q函数
- 区别和联系
- 参考文献
Q函数与正态分布的累积分布函数相关,并且是误差函数的补函数,这使得Q函数在应用数学和物理学中非常重要。
在统计学中,Q函数是标准正态分布的尾部分布函数[1][2]。换句话说,Q(x)是一个正态(高斯)随机变量取值大于x个标准差的概率。也可以理解为,Q(x)也是一个标准正态随机变量取值大于x的概率。
如果Y是一个均值μ和方差σ²的高斯随机变量,那么 Y − μ σ \frac{Y - \mu}{\sigma} σY−μ 是标准正态分布的,
P ( Y > y ) = P ( X > x ) = Q ( x ) P(Y > y) = P(X > x) = Q(x) P(Y>y)=P(X>x)=Q(x) 其中 x = y − μ σ x = \frac{y - \mu}{\sigma} x=σy−μ。
Q函数的其他定义,也都是正态累积分布函数的简单变形,也经常使用[3]。
由于Q函数与正态分布的累积分布函数以及误差函数的关系,它在应用数学和物理学中扮演着重要的角色。

定义和基本特性
Q函数的标准定义为:
Q ( x ) = 1 2 π ∫ x ∞ exp ( − u 2 2 ) d u . Q(x) = \frac{1}{\sqrt{2\pi}} \int_x^\infty \exp\left(-\frac{u^2}{2}\right) du. Q(x)=2π1∫x∞exp(−2u2)du.
因此,
Q ( x ) = 1 − Q ( − x ) = 1 − Φ ( x ) , Q(x) = 1 - Q(-x) = 1 - \Phi(x), Q(x)=1−Q(−x)=1−Φ(x),
其中 Φ ( x ) \Phi(x) Φ(x)是标准正态高斯分布的累积分布函数。
Q函数可以用误差函数或补误差函数来表达,如下:
Q ( x ) = 1 2 ( 2 ∫ x 2 ∞ exp ( − t 2 ) d t ) = 1 2 ( 1 − erf ( x 2 ) ) − or − = 1 2 erfc ( x 2 ) . \begin{aligned} Q(x) &= \frac{1}{2} \left( 2 \int_{\frac{x}{\sqrt{2}}}^\infty \exp(-t^2) dt \right) \\ &= \frac{1}{2} \left( 1 - \text{erf}\left(\frac{x}{\sqrt{2}}\right) \right) - \text{or} - \\ &=\frac{1}{2} \text{erfc}\left(\frac{x}{\sqrt{2}}\right). \end{aligned} Q(x)=21(2∫2x∞exp(−t2)dt)=21(1−erf(2x))−or−=21erfc(2x).
erf和erfc分别为误差函数和误差补函数。
已知的Q函数的另一种形式,称为Craig公式,由其发现者命名,表达如下[4]:
Q ( x ) = 1 π ∫ 0 π 2 exp ( − x 2 2 sin 2 θ ) d θ . Q(x) = \frac{1}{\pi} \int_0^{\frac{\pi}{2}} \exp\left(-\frac{x^2}{2 \sin^2 \theta}\right) d\theta. Q(x)=π1∫02πexp(−2sin2θx2)dθ.
这个表达式仅对x的正值有效,但可以用 (Q(x) = 1 - Q(-x)) 来得到x的负值。这种形式的优点是积分范围是固定和有限的。
Craig公式后来被Behnad (2020)[5]扩展,用于两个非负变量之和的Q函数,如下:
Q ( x + y ) = 1 π ∫ 0 π 2 exp ( − x 2 2 sin 2 θ − y 2 2 cos 2 θ ) d θ , x , y ≥ 0. Q(x + y) = \frac{1}{\pi} \int_0^{\frac{\pi}{2}} \exp\left(-\frac{x^2}{2 \sin^2 \theta} - \frac{y^2}{2 \cos^2 \theta}\right) d\theta, \quad x, y \geq 0. Q(x+y)=π1∫02πexp(−2sin2θx2−2cos2θy2)dθ,x,y≥0.

边界和近似
-
Q函数不是基本函数。但是它有上下界[6][7]:
x 1 + x 2 ϕ ( x ) < Q ( x ) < ϕ ( x ) x , x > 0 , \frac{x}{1+x^2} \phi(x) < Q(x) < \frac{\phi(x)}{x}, \quad x > 0, 1+x2xϕ(x)<Q(x)<xϕ(x),x>0,
其中 ϕ ( x ) \phi(x) ϕ(x)是标准正态分布的概率密度函数,这些界限随x增大而逐渐变得更加紧密。 -
通过替代 u = v 2 u = v\sqrt{2} u=v2,上界可以推导如下:
Q ( x ) = ∫ x ∞ ϕ ( u ) d u < ∫ x ∞ e − u 2 / 2 x 2 π d u = e − x 2 / 2 x 2 π . Q(x) = \int_x^\infty \phi(u) du < \int_x^\infty \frac{e^{-u^2/2}}{x\sqrt{2\pi}} du = \frac{e^{-x^2/2}}{x\sqrt{2\pi}}. Q(x)=∫x∞ϕ(u)du<∫x∞x2πe−u2/2du=x2πe−x2/2.
类似地,使用 ϕ ′ ( u ) = − u ϕ ( u ) \phi'(u) = -u\phi(u) ϕ′(u)=−uϕ(u)和quotient rule,
( 1 + 1 x 2 ) Q ( x ) = ∫ x ∞ ( 1 + 1 u 2 ) ϕ ( u ) d u > ( 1 + 1 x 2 ) ∫ x ∞ ϕ ( u ) u d u = ϕ ( x ) x . \left(1 + \frac{1}{x^2}\right) Q(x) = \int_x^\infty \left(1 + \frac{1}{u^2}\right) \phi(u) du > \left(1 + \frac{1}{x^2}\right) \int_x^\infty \frac{\phi(u)}{u} du = \frac{\phi(x)}{x}. (1+x21)Q(x)=∫x∞(1+u21)ϕ(u)du>(1+x21)∫x∞uϕ(u)du=xϕ(x). -
Q(x)的解提供了下界。
-
上界和下界的几何平均给出了Q(x)的一个相对适合的近似:
Q ( x ) ≈ ϕ ( x ) 1 + x 2 , x ≥ 0. Q(x) \approx \frac{\phi(x)}{\sqrt{1+x^2}}, \quad x \geq 0. Q(x)≈1+x2ϕ(x),x≥0. -
更紧的Q(x)的边界和近似也可以通过优化以下表达式获得[7]:
Q ^ ( x ) = ϕ ( x ) ( 1 − a ) x + a x 2 + b . \hat{Q}(x) = \frac{\phi(x)}{(1-a)x + a\sqrt{x^2 + b}}. Q^(x)=(1−a)x+ax2+bϕ(x).
例如,最佳上界是由 (a = 0.344) 和 (b = 5.334) 给出,最大绝对相对误差为0.44%。最佳下界是由 a = 1 / π a = 1/\pi a=1/π和 b = 2 π b = 2\pi b=2π给出,最大绝对相对误差为1.17%。 -
Q函数的切诺夫界限是:
Q ( x ) ≤ e − x 2 / 2 , x > 0. Q(x) \leq e^{-x^2/2}, \quad x > 0. Q(x)≤e−x2/2,x>0. -
改进的指数边界和纯粹的指数近似是[8]:
Q ( x ) ≤ 1 4 e − x 2 + 1 2 e − x 2 / 2 , x > 0. Q(x) \leq \frac{1}{4} e^{-x^2} + \frac{1}{2} e^{-x^2/2}, \quad x > 0. Q(x)≤41e−x2+21e−x2/2,x>0.
Q ( x ) ≈ 1 12 e − 1.3 x 2 + 1 4 e − 0.3 x 2 , x > 0. Q(x) \approx \frac{1}{12} e^{-1.3x^2} + \frac{1}{4} e^{-0.3x^2}, \quad x > 0. Q(x)≈121e−1.3x2+41e−0.3x2,x>0. -
以上由Tanash & Riihonen(2020)推广[9],表明Q(x)可以被准确近似或界定。他们提出了一种系统的方法来解决数值系数 { ( a n , b n ) } n = 1 N \{(a_n, b_n)\}_{n=1}^N {(an,bn)}n=1N,使得 Q ( x ) ≈ Q ^ ( x ) Q(x) \approx \hat{Q}(x) Q(x)≈Q^(x), Q ( x ) ≤ Q ^ ( x ) Q(x) \leq \hat{Q}(x) Q(x)≤Q^(x), 或 Q ( x ) ≥ Q ^ ( x ) Q(x) \geq \hat{Q}(x) Q(x)≥Q^(x)对于 x ≥ 0 x \geq 0 x≥0。以N = 20为例,相对和绝对近似误差小于 2.831 × 1 0 − 6 2.831 \times 10^{-6} 2.831×10−6和 1.416 × 1 0 − 6 1.416 \times 10^{-6} 1.416×10−6。针对指数函数的多种变体的系数 { ( a n , b n ) } n = 1 N \{(a_n, b_n)\}_{n=1}^N {(an,bn)}n=1N 已经公开访问,作为一个全面的数据集[10]。
-
另一种近似 Q ( x ) Q(x) Q(x) 对于 x ∈ [ 0 , ∞ ) x \in [0, \infty) x∈[0,∞) 是由Karagiannidis和Lioumpas(2007)[11]提出的,他们展示了适当选择的参数 ({A, B}) 可以实现:
f ( x ; A , B ) = ( 1 − e − A x ) e − x 2 B π x ≈ erfc ( x ) . f(x; A, B) = \frac{(1 - e^{-Ax})e^{-x^2}}{B\sqrt{\pi x}} \approx \text{erfc}(x). f(x;A,B)=Bπx(1−e−Ax)e−x2≈erfc(x).
在范围 [ 0 , R ] [0, R] [0,R]上, f ( x ; A , B ) f(x; A, B) f(x;A,B) 和 erfc ( x ) \text{erfc}(x) erfc(x) 之间的绝对误差可以通过计算
{ A , B } = arg min { A , B } ∫ 0 R ∣ f ( x ; A , B ) − erfc ( x ) ∣ d x . \{A, B\} = \arg \min_{\{A,B\}} \int_0^R |f(x; A, B) - \text{erfc}(x)| \, dx. {A,B}=arg{A,B}min∫0R∣f(x;A,B)−erfc(x)∣dx.
来最小化。使用 R = 20 R = 20 R=20 并进行数值积分,他们找到了当 { A , B } = { 1.98 , 1.135 } \{A, B\} = \{1.98, 1.135\} {A,B}={1.98,1.135} 时,误差最小,这给出了 x ≥ 0 \sqrt{x} \geq 0 x≥0 的一个良好近似。带入这些值并利用上述 Q ^ ( x ) \hat{Q}(x) Q^(x)和 erfc ( x ) \text{erfc}(x) erfc(x) 之间的关系可得:
Q ( x ) ≈ ( 1 − e − 1.98 x ) e − x 2 / 2 1.135 2 π x , x ≥ 0. Q(x) \approx \frac{(1 - e^{-1.98x})e^{-x^2/2}}{1.135\sqrt{2\pi x}}, \quad x \geq 0. Q(x)≈1.1352πx(1−e−1.98x)e−x2/2,x≥0.
对于上述“Karagiannidis-Lioumpas近似”,也可以使用替代系数,以便为特定应用专门定制精度或将其转换为紧密边界。[12] -
López-Benítez 和 Casadevall(2011)[13]基于二阶指数函数提出了更紧凑且可跟踪的 Q ( x ) Q(x) Q(x)近似,适用于正值 x ∈ [ 0 , ∞ ) x \in [0, \infty) x∈[0,∞):
Q ( x ) ≈ e − a x 2 − b x − c , x ≥ 0. Q(x) \approx e^{-ax^2-bx-c}, \quad x \geq 0. Q(x)≈e−ax2−bx−c,x≥0.
这些系数 ((a, b, c)) 可以在任何所需的参数范围内进行优化,以最小化平方误差总和 ( a = 0.3842 , b = 0.7640 , c = 0.6964 a = 0.3842, b = 0.7640, c = 0.6964 a=0.3842,b=0.7640,c=0.6964对于 x ∈ [ 0 , 20 ] x \in [0, 20] x∈[0,20]) 或最小化最大绝对误差 ( a = 0.4920 , b = 0.2887 , c = 1.1893 a = 0.4920, b = 0.2887, c = 1.1893 a=0.4920,b=0.2887,c=1.1893对于 x ∈ [ 0 , 20 ] x \in [0, 20] x∈[0,20])。这种近似提供了一个良好的折衷选择,并且可以在分析上扩展到任何 (Q(x)) 的幂次,而不改变近似的代数形式。
逆Q函数
逆Q函数可以与逆误差函数相关联:
Q − 1 ( y ) = 2 erf − 1 ( 1 − 2 y ) = 2 erfc − 1 ( 2 y ) . Q^{-1}(y) = \sqrt{2} \, \text{erf}^{-1}(1 - 2y) = \sqrt{2} \, \text{erfc}^{-1}(2y). Q−1(y)=2erf−1(1−2y)=2erfc−1(2y).
这个函数在数字通信中有应用。通常用分贝(dB)表示,并通常称为Q因子:
Q -factor = 20 log 10 ( Q − 1 ( y ) ) dB Q\text{-factor} = 20 \log_{10}(Q^{-1}(y)) \, \text{dB} Q-factor=20log10(Q−1(y))dB
其中y是被分析的数字调制信号的误码率(BER)。例如,在加性白高斯噪声中的正交相移键控(QPSK)中,上述定义的Q因子恰好与信噪比的分贝值相对应,该信噪比产生等于y的误码率。

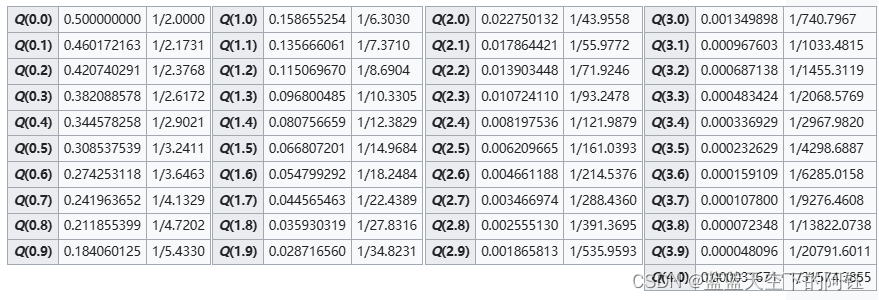
Q函数的值
q函数非常易于制作成表格,可以在大多数数学软件包中直接计算,如R和Python、MATLAB和Mathematica中提供的软件包。下面给出q函数的一些值,以供参考
高维度
Q函数可以推广到更高维度:
Q ( x ) = P ( X ≥ x ) , Q(\mathbf{x}) = P(\mathbf{X} \geq \mathbf{x}), Q(x)=P(X≥x),
其中 X ∼ N ( 0 , Σ ) \mathbf{X} \sim N(\mathbf{0}, \Sigma) X∼N(0,Σ) 遵循具有协方差矩阵 Σ \Sigma Σ的多元正态分布,且阈值的形式为 x = γ l ∗ \mathbf{x} = \gamma \mathbf{l}^* x=γl∗ ,这里 l ∗ > 0 \mathbf{l}^* > \mathbf{0} l∗>0 是一个正向量, γ > 0 \gamma > 0 γ>0是一个正常数。就像一维情况一样,没有简单的解析公式来表示多维的Q函数。然而,随着 γ \gamma γ 的增加,Q函数可以被任意好地近似。
多一嘴 Marcum Q函数
MARCUM Q函数和标准Q函数(通常指的是高斯Q函数)在统计和通信理论中都有重要应用,但它们用于描述不同类型的概率分布和场景。讲讲两者主要区别和联系:
MARCUM Q函数
-
定义:Marcum Q函数通常表示为 (Q_M(a, b)),它是一种特殊函数,常用于雷达信号处理和其他涉及非中心卡方分布的领域。该函数定义为:
Q M ( a , b ) = ∫ b ∞ x exp ( − x 2 + a 2 2 ) I M − 1 ( a x ) d x , Q_M(a, b) = \int_b^\infty x \exp\left(-\frac{x^2 + a^2}{2}\right) I_{M-1}(ax) \, dx, QM(a,b)=∫b∞xexp(−2x2+a2)IM−1(ax)dx,
其中 I M − 1 ( a x ) I_{M-1}(ax) IM−1(ax) 是第 M − 1 M-1 M−1阶的修正贝塞尔函数,参数 a a a和 b b b 是非负实数, M M M是函数的阶。 -
应用:Marcum Q函数广泛应用于雷达检测理论,特别是在评估非中心卡方分布的尾部概率时。
-
特性:这个函数特别用于描述非中心参数下的随机变量的行为,与中心高斯分布的行为(由标凊Q函数描述)有所不同。
高斯Q函数
-
定义:高斯Q函数定义为一个标准正态分布随机变量超过某个值的尾部概率。具体来说,它是:
Q ( x ) = 1 2 π ∫ x ∞ exp ( − u 2 2 ) d u , Q(x) = \frac{1}{\sqrt{2\pi}} \int_x^\infty \exp\left(-\frac{u^2}{2}\right) du, Q(x)=2π1∫x∞exp(−2u2)du,
其中 x x x是任意实数。 -
应用:高斯Q函数用于广泛的应用中,包括信号处理、通信理论中的误码率计算,以及其他需要评估高斯噪声影响的场合。
-
特性:这个函数关注的是中心高斯随机变量的尾部行为,特别是在信号处理和统计分析中常见的场景。
区别和联系
- 应用领域的不同:高斯Q函数主要用于处理和分析高斯分布相关的问题,而Marcum Q函数更常见于处理有特定非中心参数的分布,如雷达和其他信号处理技术中的非中心卡方分布。
- 数学表达和复杂性:Marcum Q函数在数学形式上更复杂,包括修正贝塞尔函数,这使得它在分析和计算上比标准Q函数更为复杂。
- 共同点:两者都用于评估某种随机分布中超过某个阈值的概率,尽管它们适用的分布类型不同。
两种Q函数应用于不同类型的概率分布,并且有着不同的数学属性和应用领域。
参考文献
- The Q-function, from cnx.org
- Basic properties of the Q-function Archived March 25, 2009, at the Wayback Machine
- Normal Distribution Function – from Wolfram MathWorld
- Craig, J.W. (1991). “A new, simple and exact result for calculating the probability of error for two-dimensional signal constellations”. MILCOM 91 - Conference record. pp. 571–575. doi:10.1109/MILCOM.1991.258319. ISBN 0-87942-691-8. S2CID 16034807.
- Behnad, Aydin (2020). “A Novel Extension to Craig’s Q-Function Formula and Its Application in Dual-Branch EGC Performance Analysis”. IEEE Transactions on Communications. 68 (7): 4117–4125. doi:10.1109/TCOMM.2020.2986209.
- Gordon, R.D. (1941). “Values of Mills’ ratio of area to bounding ordinate and of the normal probability integral for large values of the argument”. Ann. Math. Stat. 12: 364–366
- Borjesson, P.; Sundberg, C.-E. (1979). “Simple Approximations of the Error Function Q(x) for Communications Applications”. IEEE Transactions on Communications. 27 (3): 639–643. doi:10.1109/TCOM.1979.1094433.
- Chiani, M.; Dardari, D.; Simon, M.K. (2003). “New exponential bounds and approximations for the computation of error probability in fading channels” . IEEE Transactions on Wireless Communications. 24 (5): 840–845. doi:10.1109/TWC.2003.814350.
- Tanash, I.M.; Riihonen, T. (2020). “Global minimax approximations and bounds for the Gaussian Q-function by sums of exponentials”. IEEE Transactions on Communications. 68 (10): 6514–6524. arXiv:2007.06939. doi:10.1109/TCOMM.2020.3006902. S2CID 220514754.
- Tanash, I.M.; Riihonen, T. (2020). “Coefficients for Global Minimax Approximations and Bounds for the Gaussian Q-Function by Sums of Exponentials [Data set]”. Zenodo. doi:10.5281/zenodo.4112978.
- Karagiannidis, George; Lioumpas, Athanasios (2007). “An Improved Approximation for the Gaussian Q-Function” . IEEE Communications Letters. 11 (8): 644–646. doi:10.1109/LCOMM.2007.070470. S2CID 4043576.
- Tanash, I.M.; Riihonen, T. (2021). “Improved coefficients for the Karagiannidis–Lioumpas approximations and bounds to the Gaussian Q-function”. IEEE Communications Letters. 25 (5): 1468–1471. arXiv:2101.07631. doi:10.1109/LCOMM.2021.3052257. S2CID 231639206.
- Lopez-Benitez, Miguel; Casadevall, Fernando (2011). “Versatile, Accurate, and Analytically Tractable Approximation for the Gaussian Q-Function” . IEEE Transactions on Communications. 59 (4): 917–922. doi:10.1109/TCOMM.2011.012711.100105. S2CID 1145101.
- Savage, I. R. (1962). “Mills ratio for multivariate normal distributions”. Journal of Research of the National Bureau of Standards Section B. 66 (3): 93–96. doi:10.6028/jres.066B.011. Zbl 0105.12601.
- Botev, Z. I. (2016). “The normal law under linear restrictions: simulation and estimation via minimax tilting”. Journal of the Royal Statistical Society, Series B. 79: 125–148. arXiv:1603.04166. Bibcode:2016arXiv160304166B. doi:10.1111/rssb.12162. S2CID 88515228.
- Botev, Z. I.; Mackinlay, D.; Chen, Y.-L. (2017). “Logarithmically efficient estimation of the tail of the multivariate normal distribution”. 2017 Winter Simulation Conference (WSC). IEEE. pp. 1903–191. doi:10.1109/WSC.2017.8247926. ISBN 978-1-5386-3428-8. S2CID 4626481.
这篇关于Q-function Q函数 (维基百科)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


