本文主要是介绍【强烈推荐】四元数与三维旋转,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1 强烈推荐讲解四元数与三维旋转的这篇文章,深入浅出
- 2 笔记
- 2.1 复数
- 2.1.1 复数的定义
- 2.1.2 复数的乘法与二维旋转
- 2.2 三维空间中的旋转
- 2.2.1 角轴
- 2.2.2 旋转的分解
- 2.3 四元数
- 2.3.1 四元数的定义
- 2.3.2 四元数的乘法
- 2.3.3 四元数与三维旋转
- 2.3.4 三维旋转的矩阵形式
1 强烈推荐讲解四元数与三维旋转的这篇文章,深入浅出
https://github.com/Krasjet/quaternion
2 笔记
下面是阅读这篇文章的笔记,整体介绍的思路是从复数开始,了解复数的各种性质,逐步扩展到四元数,毕竟四元数和复数非常类似。
2.1 复数
2.1.1 复数的定义

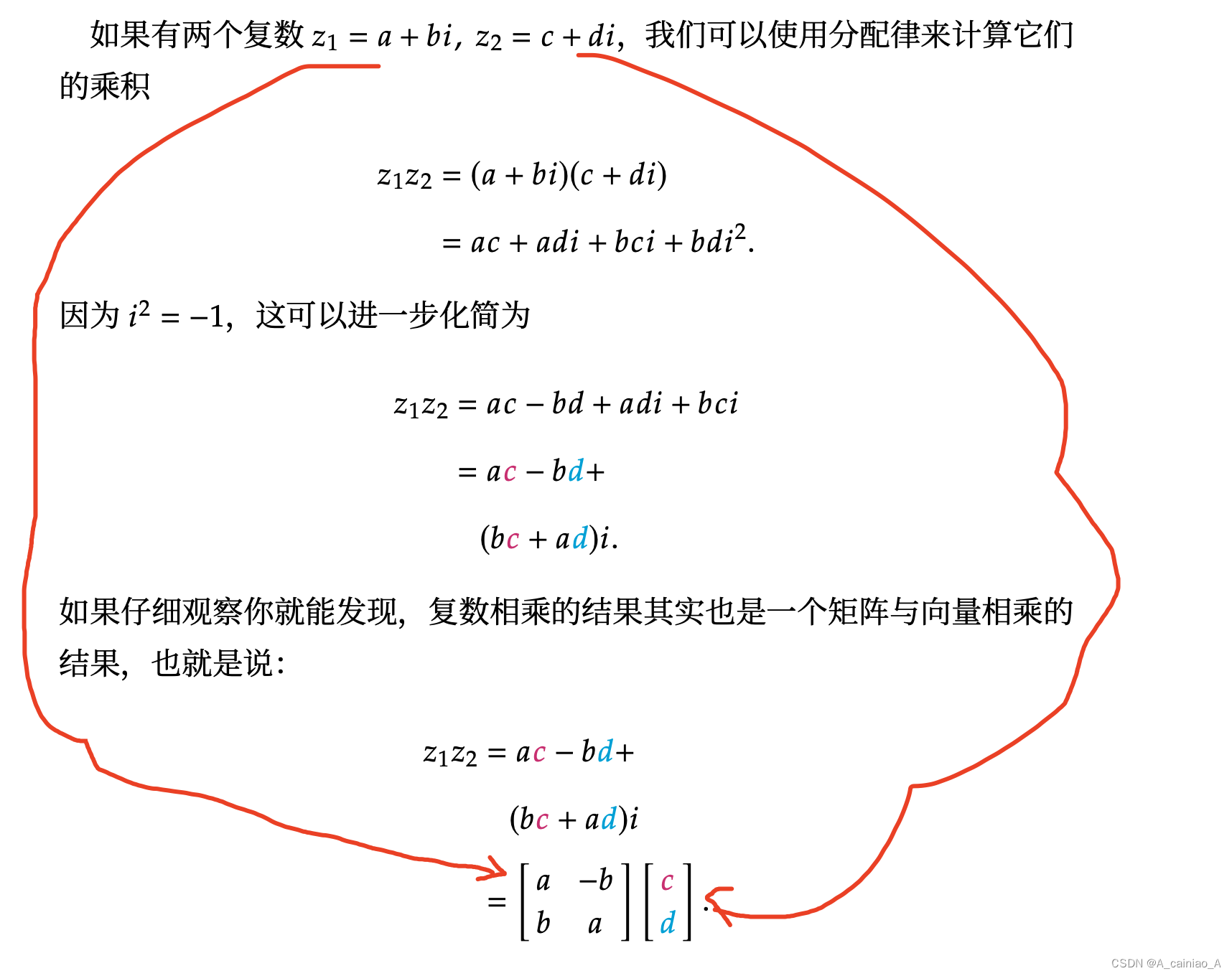
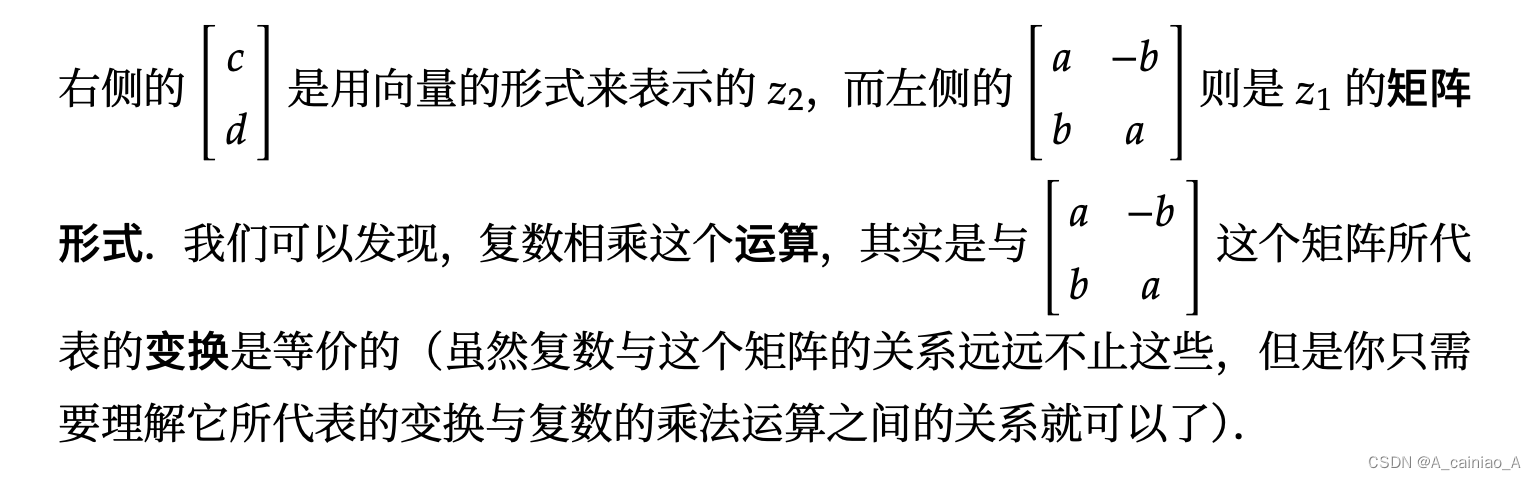
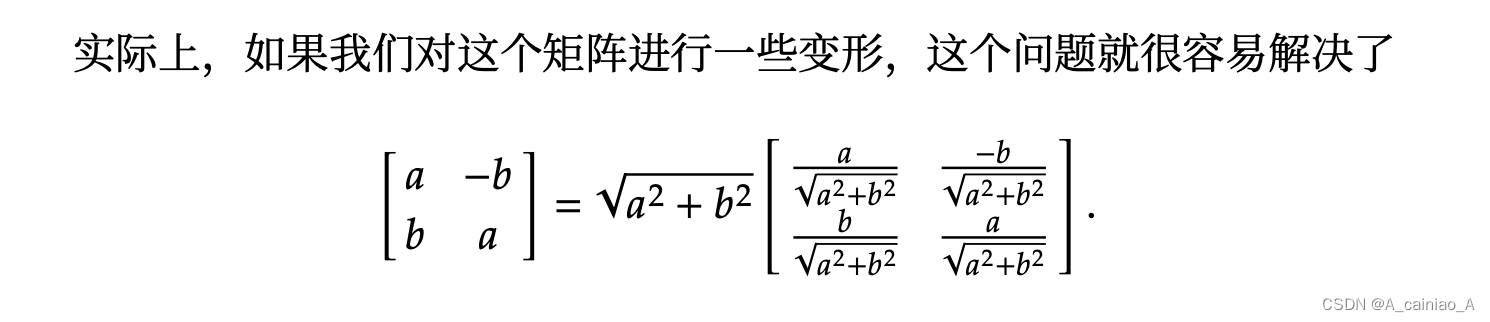
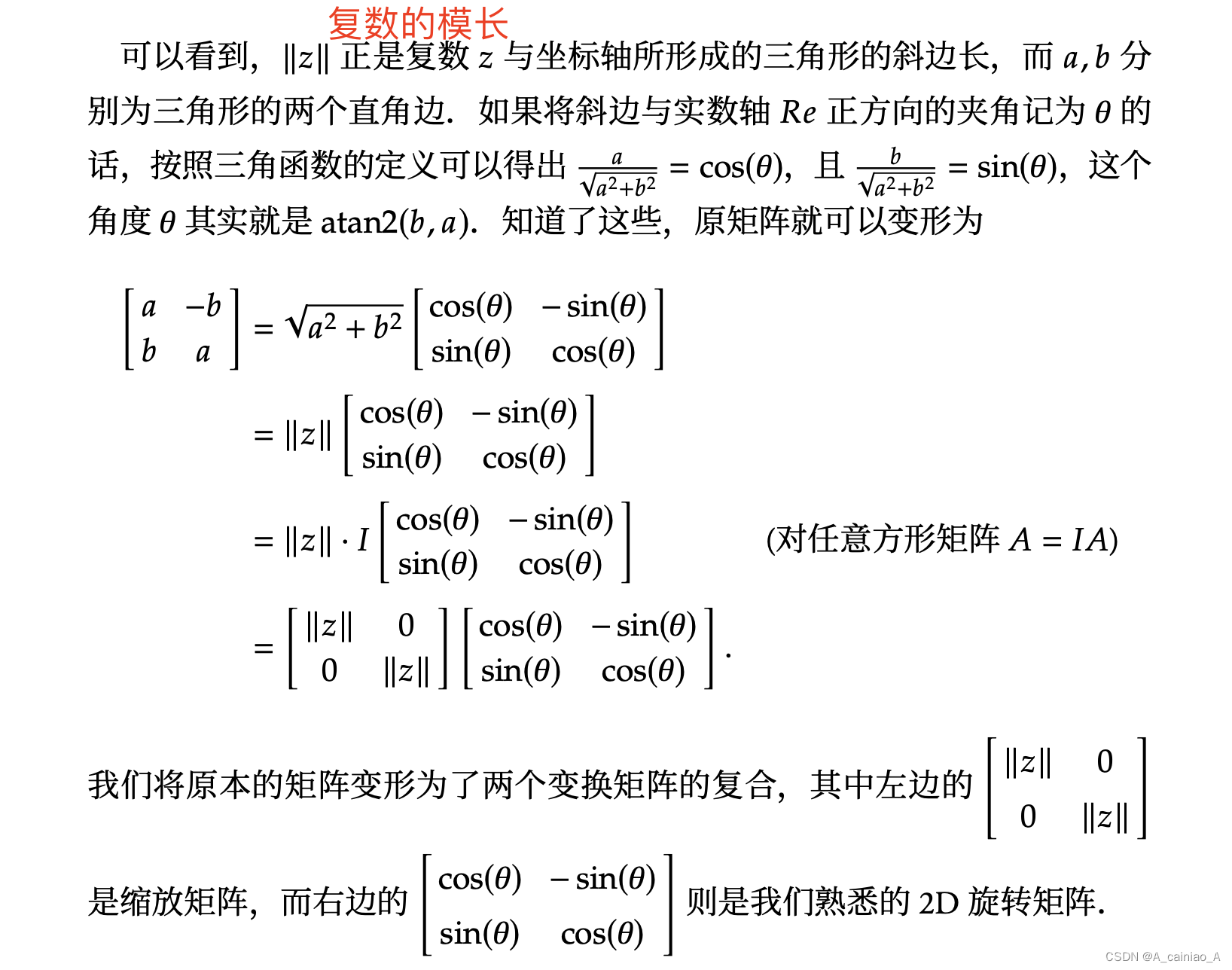
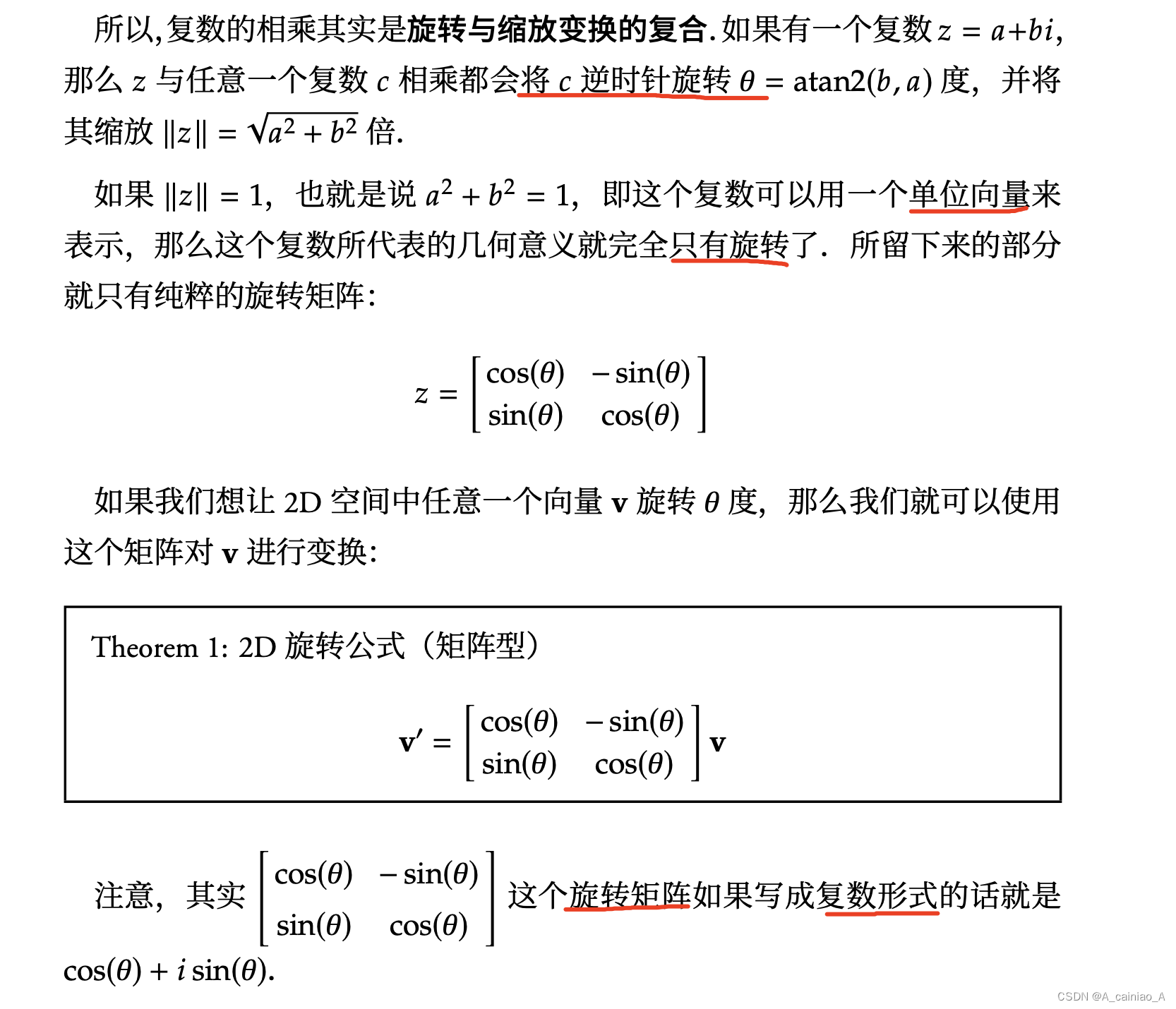
2.1.2 复数的乘法与二维旋转
复数的乘法可以转成矩阵,这就打开了复数和旋转之间的一扇窗。
2.2 三维空间中的旋转
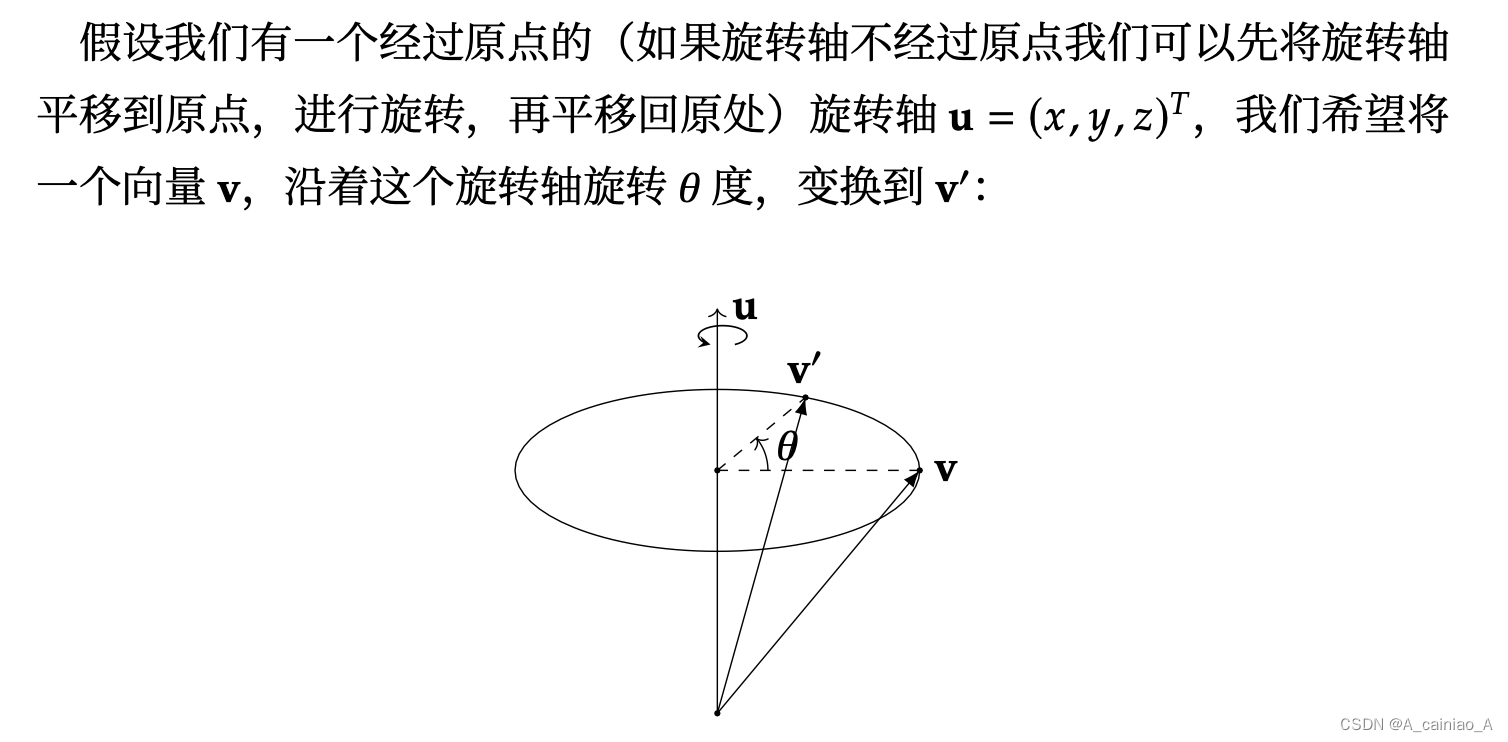
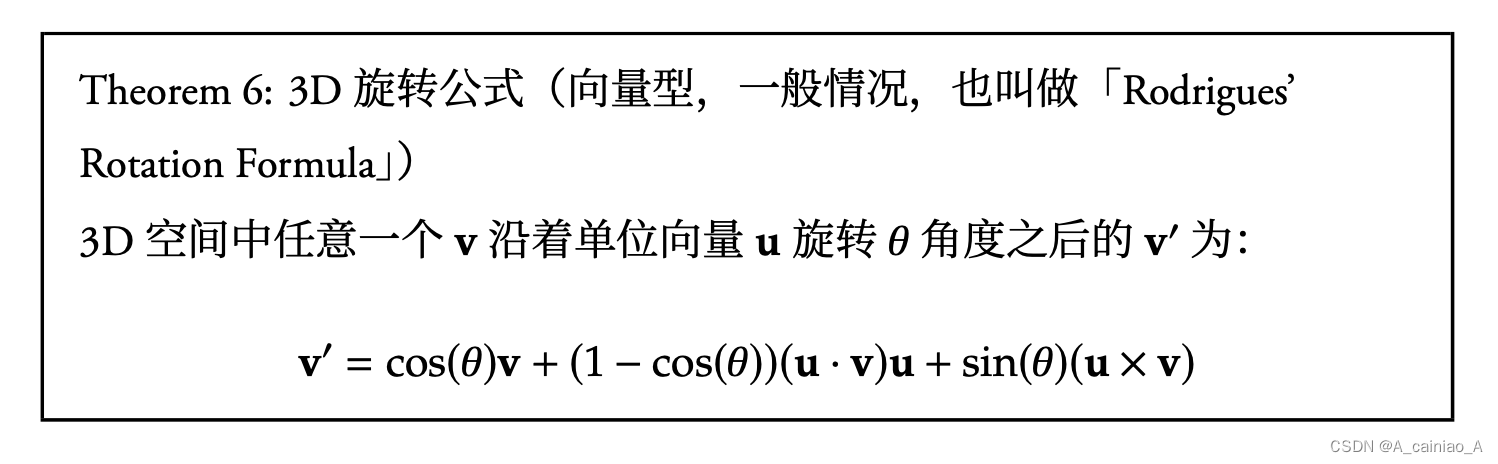
2.2.1 角轴
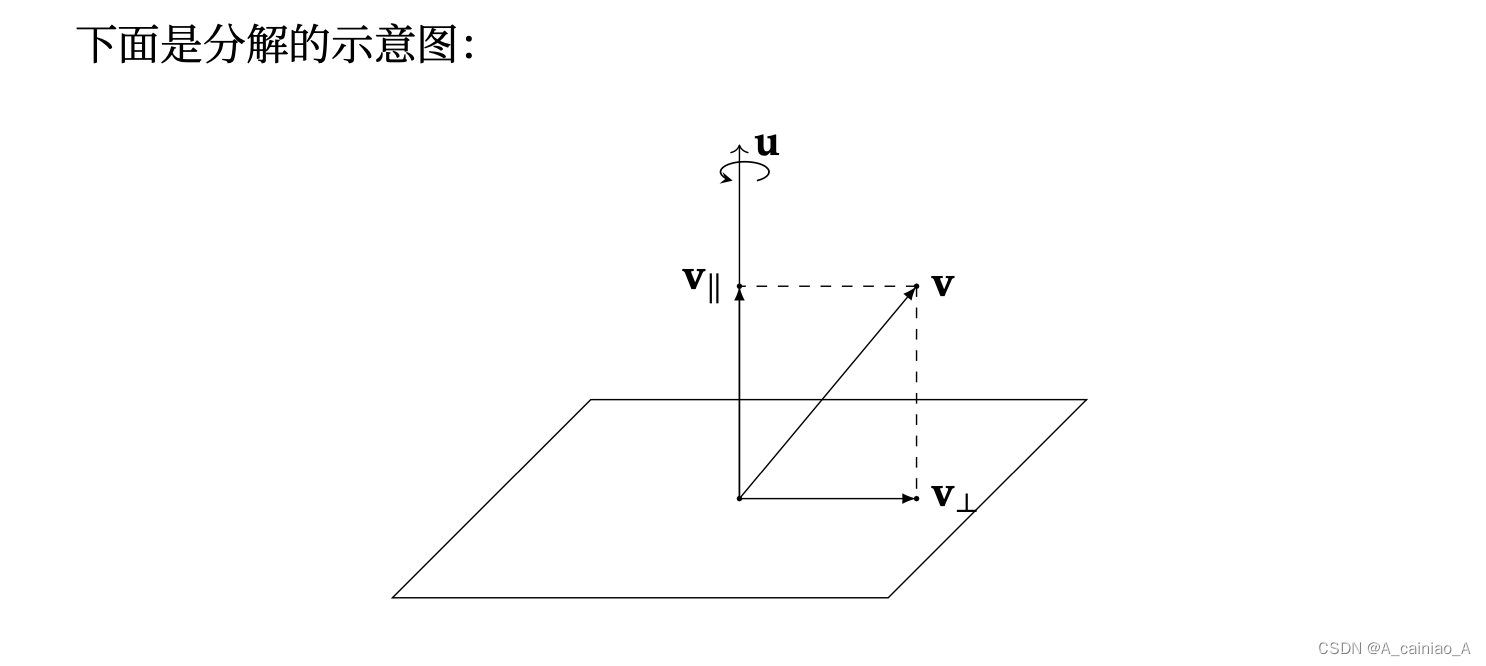
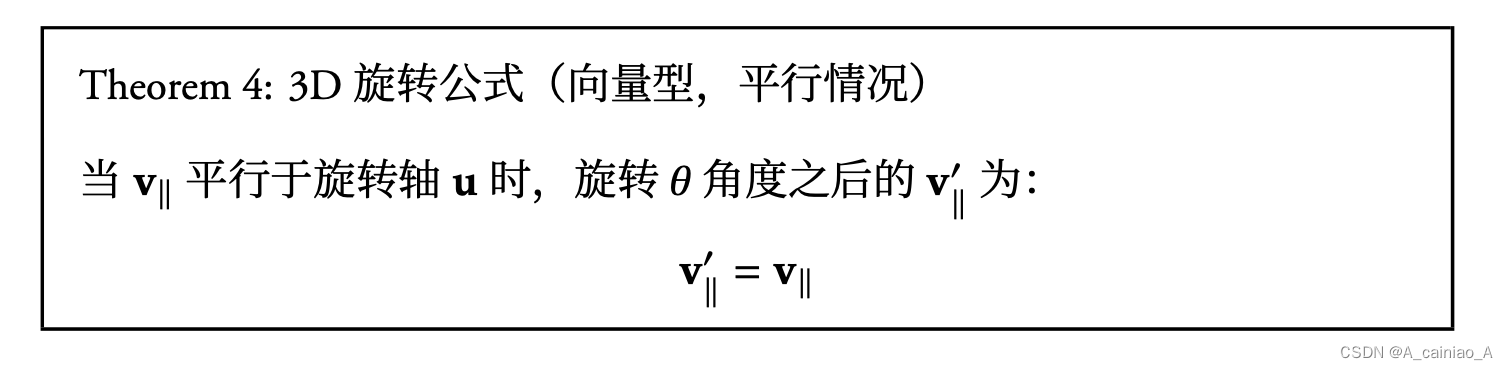
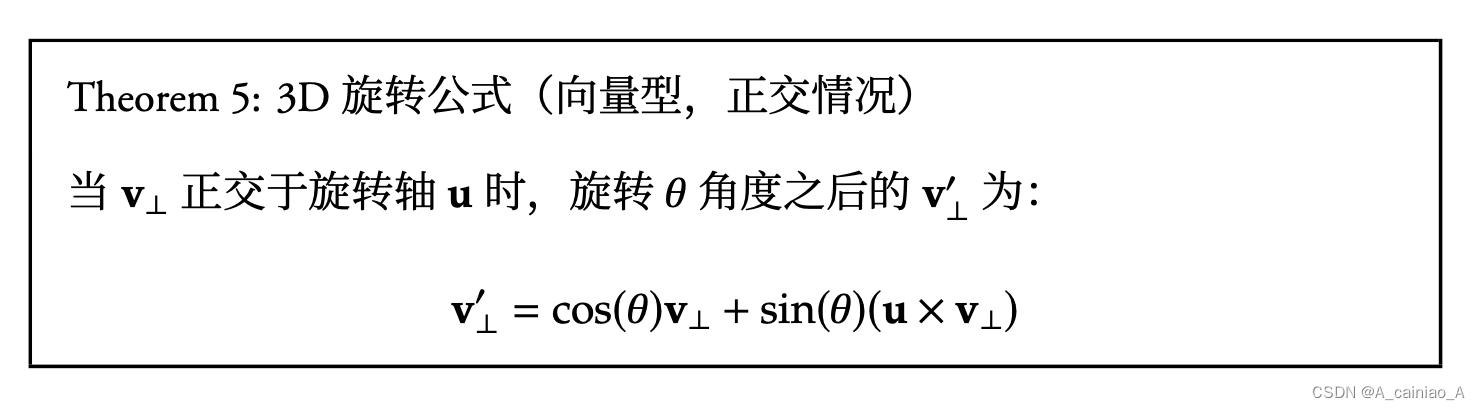
2.2.2 旋转的分解

2.3 四元数
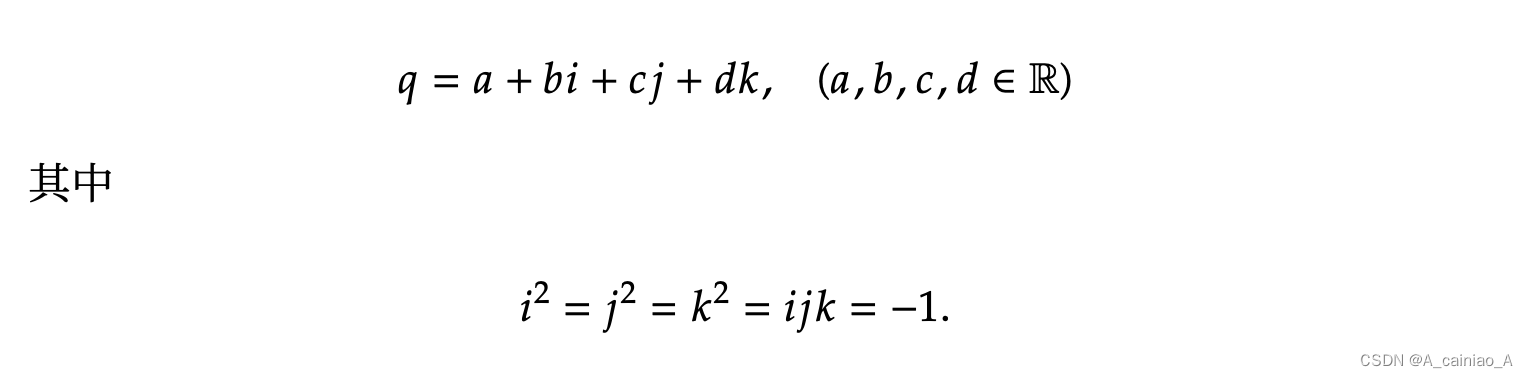
2.3.1 四元数的定义
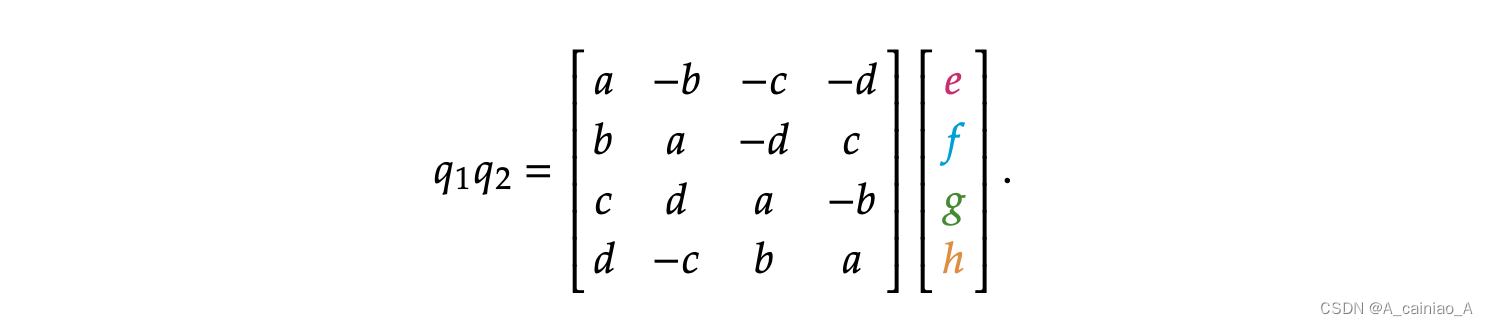
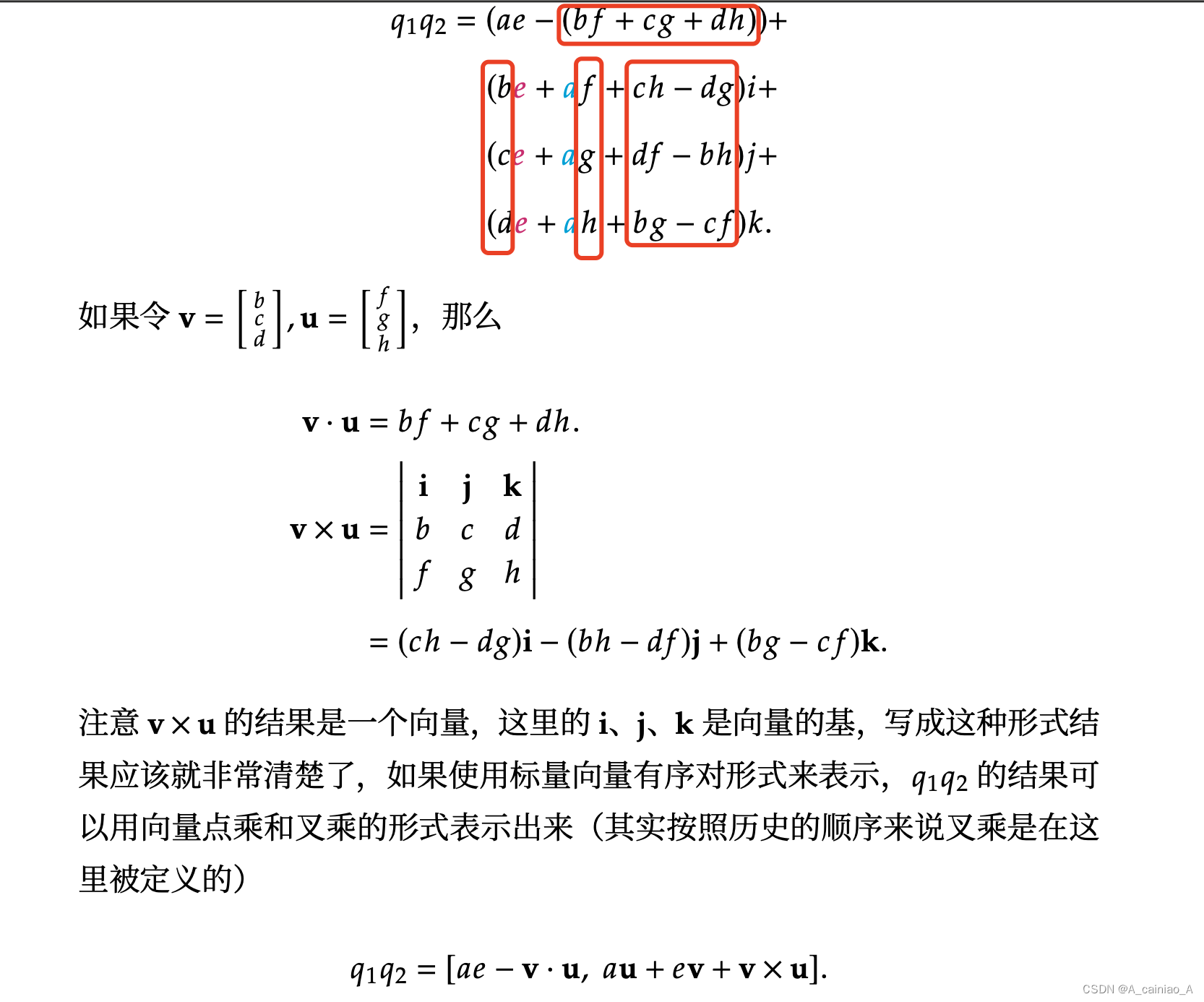
2.3.2 四元数的乘法
四元数的矩阵乘法和复数乘法的矩阵形式有几分相似
四元数 Graßmann 积
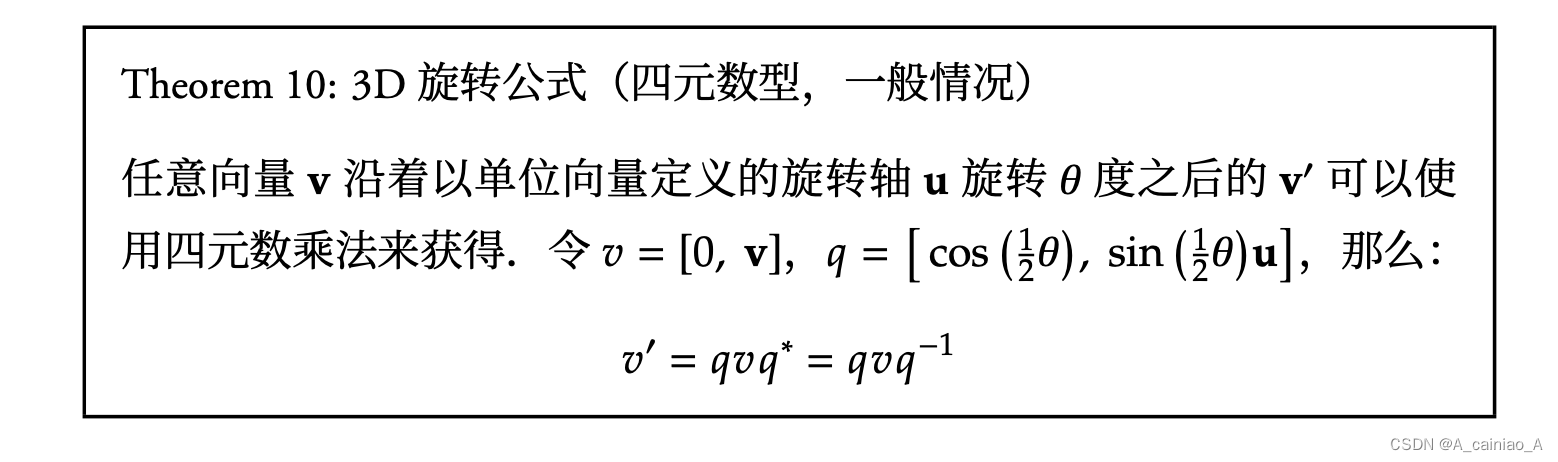
2.3.3 四元数与三维旋转
如果将需要被旋转的三维向量看作四元数的虚部,实部设为零,即纯四元数。这样就可以在四元数的运算规则下计算了。
和前面一样,将被旋转的向量分解,然后旋转。
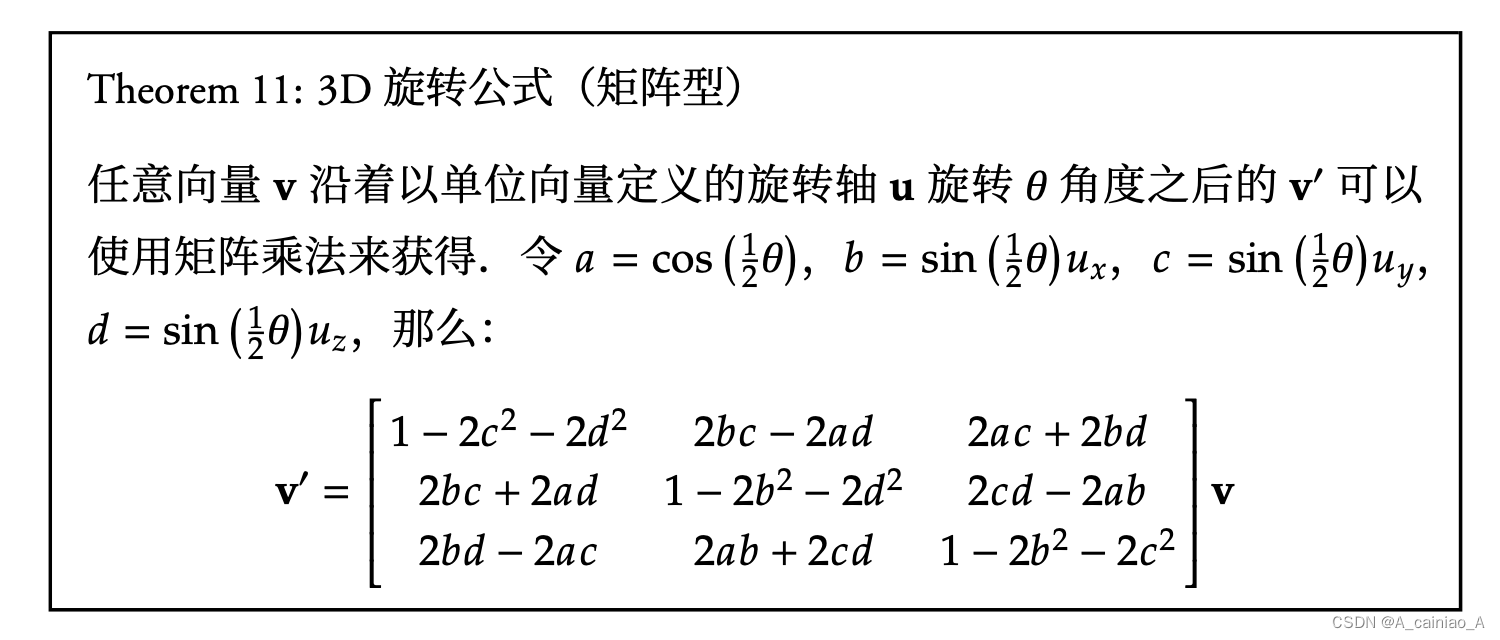
2.3.4 三维旋转的矩阵形式
这篇关于【强烈推荐】四元数与三维旋转的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







