本文主要是介绍STM32作业实现(六)闪存保存数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
STM32作业设计
STM32作业实现(一)串口通信
STM32作业实现(二)串口控制led
STM32作业实现(三)串口控制有源蜂鸣器
STM32作业实现(四)光敏传感器
STM32作业实现(五)温湿度传感器dht11
STM32作业实现(六)闪存保存数据
STM32作业实现(七)OLED显示数据
STM32作业实现(八)触摸按键TPAD
STM32作业实现(九)驱动舵机
源码位置
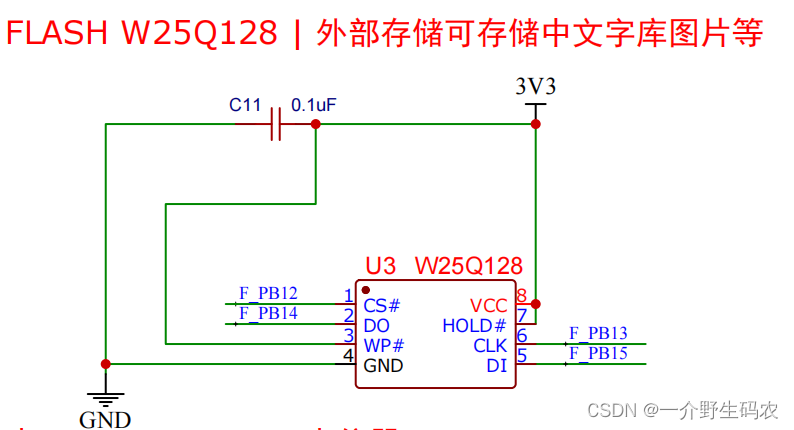
打开w25q128所需引脚(SPI)
选择spi模式
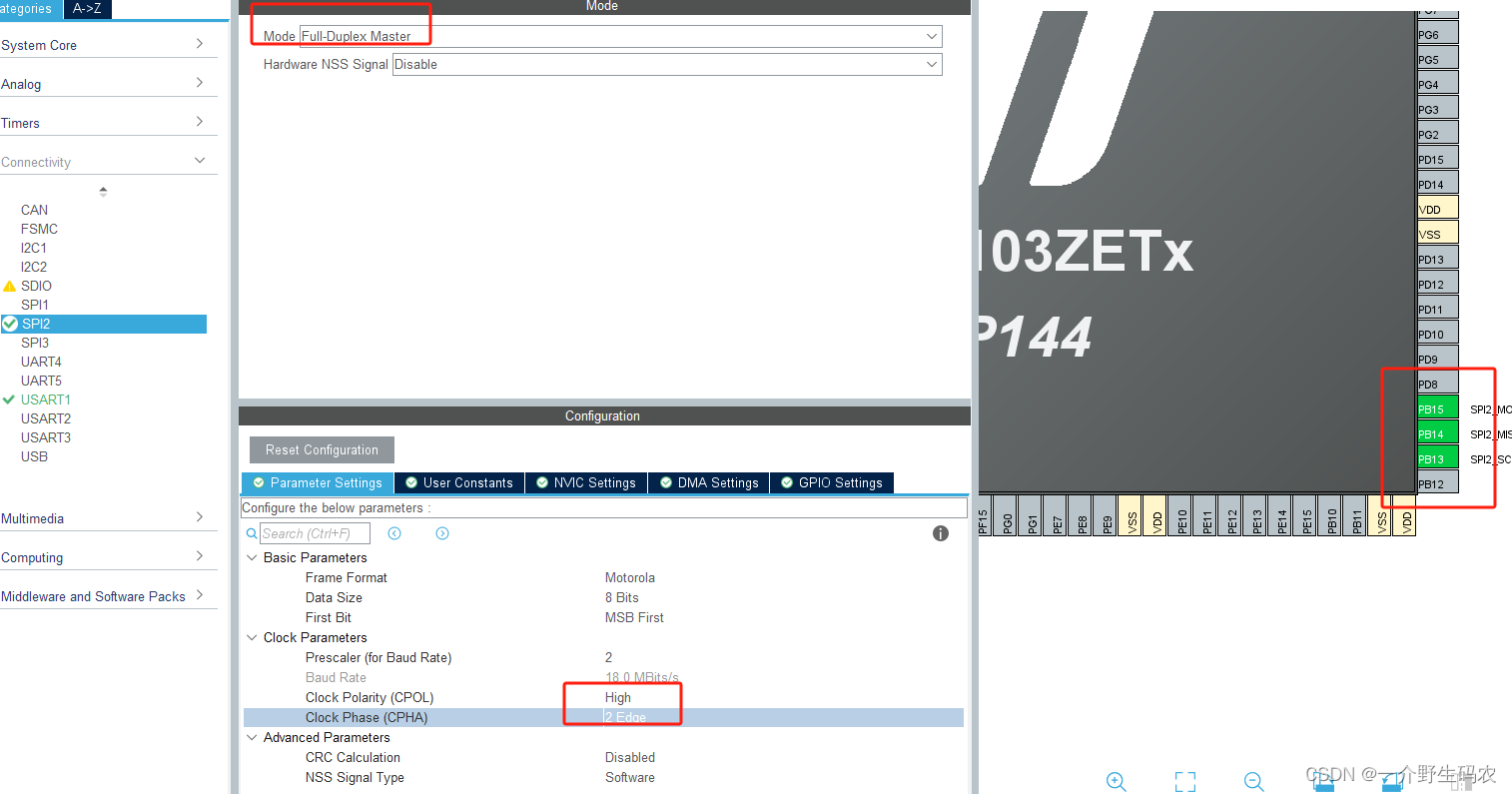
注意:我这里使用片选引脚软件模拟方式
打开片选引脚

使用tim2用于w25q1238计时(微秒级)

编写w25q128驱动文件
w25q128.h
#ifndef __W25Q128_H__
#define __W25Q128_H__#include "main.h"
#include "gpio.h"
#include "tim.h"
#include "spi.h"extern uint8_t W25QXX_BUFFER[4096];//w25q128读写指令表
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F#define W25_CS_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET)
#define W25_CS_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET)uint16_t W25QXX_ReadID(void);//读取FLASH IDvoid W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead);//读取flash
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);//写入flashvoid W25QXX_Erase_Chip(void); //整片擦除
void W25QXX_Erase_Sector(uint32_t Dst_Addr);//扇区擦除void W25QXX_PowerDown(void);//进入掉电模式
void W25QXX_WAKEUP(void);//唤醒#endifw25q128.c
#include "w25q128.h"// 微秒级延时函数(向下)
void Delay_Us(uint16_t us)
{uint16_t dif = 10000;uint16_t us_con = 10000 - us;htim2.Instance->CNT = 10000; // 设置计数值为10000HAL_TIM_Base_Start(&htim2);while (dif > us_con){dif = __HAL_TIM_GET_COUNTER(&htim2);}HAL_TIM_Base_Stop(&htim2);
}/***********************************
封装读写操作
SPI 读写一个字节
TxData:要写入的字节
返回值:读取到的字节
*************************************/
uint8_t SPI2_ReadWriteByte(uint8_t TxData)
{uint8_t Rxdata;HAL_SPI_TransmitReceive(&hspi2, &TxData, &Rxdata, 1, 1000);return Rxdata;
}
/********************************************************************* :
BIT: 7 6 5 4 3 2 1 0SPR RV TB BP2 BP1 BP0 WEL BUSY
SPR:默认0,状态寄存器保护位,配合WP使用
TB,BP2,BP1,BP0:FLASH区域写保护设置
WEL:写使能锁定
BUSY:忙标记位(1,忙;0,空闲)
默认:0x00
**********************************************************************/
uint8_t W25QXX_ReadSR(void)
{uint8_t byte = 0;W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_ReadStatusReg); // 发送读取状态寄存器命令byte = SPI2_ReadWriteByte(0xff); // 读取一个字节W25_CS_H; // 取消片选return byte;
}// 写SPI_FLASH状态寄存器
// 只有SPR,TB,BP2,BP1,BP0(bit 7,5,4,3,2)可以写!!!
void W25QXX_Write_SR(uint8_t sr)
{W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_WriteStatusReg); // 发送写取状态寄存器命令SPI2_ReadWriteByte(sr); // 写入一个字节W25_CS_H; // 取消片选
}// 等待空闲
void W25QXX_Wait_Busy(void)
{while ((W25QXX_ReadSR() & 0x01) == 0x01); // 等待BUSY位清空
}// SPI_FLASH写使能
// 将WEL置位
void W25QXX_Write_Enable(void)
{W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_WriteEnable); // 发送写使能W25_CS_H; // 取消片选
}// SPI_FLASH写禁止
// 将WEL清零
void W25QXX_Write_Disable(void)
{W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_WriteDisable); // 发送写禁止指令W25_CS_H; // 取消片选
}// 读取芯片ID W25X16的ID:0XEF14
uint16_t W25QXX_ReadID(void)
{uint16_t Temp = 0;W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_ManufactDeviceID); // 发送读取ID命令SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);Temp |= SPI2_ReadWriteByte(0xFF) << 8;Temp |= SPI2_ReadWriteByte(0xFF);W25_CS_H; // 取消片选return Temp;
}// 读取SPI FLASH
// 在指定地址开始读取指定长度的数据
// pBuffer:数据存储区
// ReadAddr:开始读取的地址(24bit)
// NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{uint16_t i;W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_ReadData); // 发送读取命令SPI2_ReadWriteByte((uint8_t)((ReadAddr) >> 16)); // 发送24bit地址SPI2_ReadWriteByte((uint8_t)((ReadAddr) >> 8));SPI2_ReadWriteByte((uint8_t)ReadAddr);for (i = 0; i < NumByteToRead; i++){pBuffer[i] = SPI2_ReadWriteByte(0XFF); // 循环读数}W25_CS_H; // 取消片选
}// SPI在一页(0~65535)内写入少于256个字节的数据
// 在指定地址开始写入最大256字节的数据
// pBuffer:数据存储区
// WriteAddr:开始写入的地址(24bit)
// NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void W25QXX_Write_Page(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint16_t i;W25QXX_Write_Enable(); // SET WELW25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_PageProgram); // 发送写页命令SPI2_ReadWriteByte((uint8_t)((WriteAddr) >> 16)); // 发送24bit地址SPI2_ReadWriteByte((uint8_t)((WriteAddr) >> 8));SPI2_ReadWriteByte((uint8_t)WriteAddr);for (i = 0; i < NumByteToWrite; i++)SPI2_ReadWriteByte(pBuffer[i]); // 循环写数W25_CS_H; // 取消片选W25QXX_Wait_Busy(); // 等待写入结束
}// 无检验写SPI FLASH
// 必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
// 具有自动换页功能
// 在指定地址开始写入指定长度的数据,但是要确保地址不越界!
// pBuffer:数据存储区
// WriteAddr:开始写入的地址(24bit)
// NumByteToWrite:要写入的字节数(最大65535)
// CHECK OK
void W25QXX_Write_NoCheck(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint16_t pageremain;pageremain = 256 - WriteAddr % 256; // 单页剩余的字节数if (NumByteToWrite <= pageremain)pageremain = NumByteToWrite; // 不大于256个字节while (1){W25QXX_Write_Page(pBuffer, WriteAddr, pageremain);if (NumByteToWrite == pageremain)break; // 写入结束了else // NumByteToWrite>pageremain{pBuffer += pageremain;WriteAddr += pageremain;NumByteToWrite -= pageremain; // 减去已经写入了的字节数if (NumByteToWrite > 256)pageremain = 256; // 一次可以写入256个字节elsepageremain = NumByteToWrite; // 不够256个字节了}};
}// 写SPI FLASH
// 在指定地址开始写入指定长度的数据
// 该函数带擦除操作!
// pBuffer:数据存储区
// WriteAddr:开始写入的地址(24bit)
// NumByteToWrite:要写入的字节数(最大65535)
uint8_t W25QXX_BUFFER[4096];
void W25QXX_Write(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;secpos = WriteAddr / 4096; // 扇区地址 0~511 for w25x16secoff = WriteAddr % 4096; // 在扇区内的偏移secremain = 4096 - secoff; // 扇区剩余空间大小if (NumByteToWrite <= secremain)secremain = NumByteToWrite; // 不大于4096个字节while (1){W25QXX_Read(W25QXX_BUFFER, secpos * 4096, 4096); // 读出整个扇区的内容for (i = 0; i < secremain; i++) // 校验数据{if (W25QXX_BUFFER[secoff + i] != 0XFF)break; // 需要擦除}if (i < secremain) // 需要擦除{W25QXX_Erase_Sector(secpos); // 擦除这个扇区for (i = 0; i < secremain; i++) // 复制{W25QXX_BUFFER[i + secoff] = pBuffer[i];}W25QXX_Write_NoCheck(W25QXX_BUFFER, secpos * 4096, 4096); // 写入整个扇区}elseW25QXX_Write_NoCheck(pBuffer, WriteAddr, secremain); // 写已经擦除了的,直接写入扇区剩余区间.if (NumByteToWrite == secremain)break; // 写入结束了else // 写入未结束{secpos++; // 扇区地址增1secoff = 0; // 偏移位置为0pBuffer += secremain; // 指针偏移WriteAddr += secremain; // 写地址偏移NumByteToWrite -= secremain; // 字节数递减if (NumByteToWrite > 4096)secremain = 4096; // 下一个扇区还是写不完elsesecremain = NumByteToWrite; // 下一个扇区可以写完了}};
}// 擦除整个芯片
// 整片擦除时间:
// W25X16:25s
// W25X32:40s
// W25X64:40s
// 等待时间超长...
void W25QXX_Erase_Chip(void)
{W25QXX_Write_Enable(); // SET WELW25QXX_Wait_Busy();W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_ChipErase); // 发送片擦除命令W25_CS_H; // 取消片选W25QXX_Wait_Busy(); // 等待芯片擦除结束
}// 擦除一个扇区
// Dst_Addr:扇区地址 0~511 for w25x16
// 擦除一个扇区的最少时间:150ms
void W25QXX_Erase_Sector(uint32_t Dst_Addr)
{Dst_Addr *= 4096;W25QXX_Write_Enable(); // SET WELW25QXX_Wait_Busy();W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_SectorErase); // 发送扇区擦除指令SPI2_ReadWriteByte((uint8_t)((Dst_Addr) >> 16)); // 发送24bit地址SPI2_ReadWriteByte((uint8_t)((Dst_Addr) >> 8));SPI2_ReadWriteByte((uint8_t)Dst_Addr);W25_CS_H; // 取消片选W25QXX_Wait_Busy(); // 等待擦除完成
}// 进入掉电模式
void W25QXX_PowerDown(void)
{W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_PowerDown); // 发送掉电命令W25_CS_H; // 取消片选Delay_Us(3); // 等待TPD
}// 唤醒
void W25QXX_WAKEUP(void)
{W25_CS_L; // 使能器件SPI2_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xABW25_CS_H; // 取消片选Delay_Us(3); // 等待TPD
}参考文章:STM32F030 HAL库硬件SPI操作W25Q16存储芯片(二)
这篇关于STM32作业实现(六)闪存保存数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






