本文主要是介绍buidldroot musl uclib库 编译,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
buildroot 修改
编译工具链
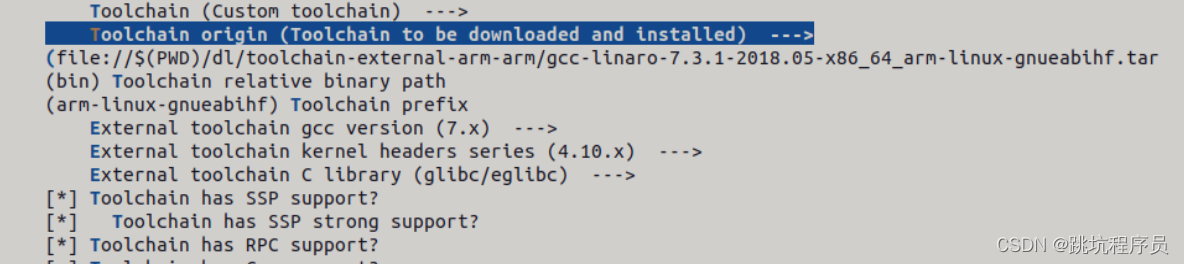
原本编译器相关信息:
Incorrect selection of the C library
buidroot编译 注意相关选项,后续使用CUSTOM TOOLCHAIN 时对应
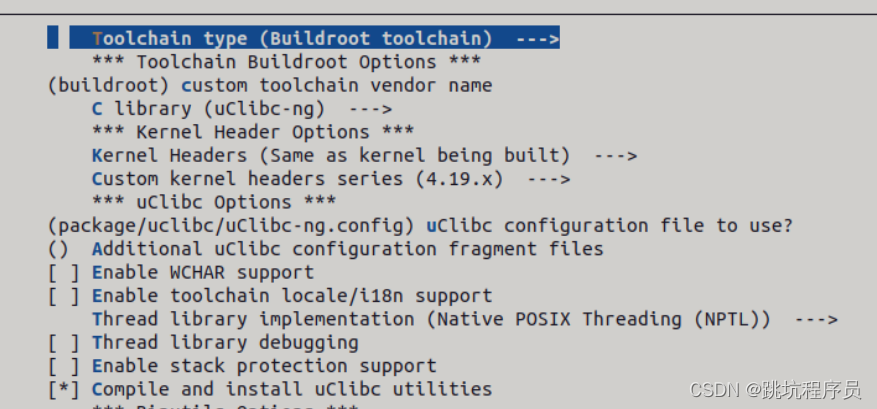
UCLIB 能将生成IMAGE 从2.9K变为2.3K
MUSL 能将生成IMAGE 从2.9K变为2.7K 变大了
arm-linux-gnueabihf
xzcat /home/xts/linux_sdk/buildroot-4-20/buildroot/dl/toolchain-external-custom/gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabihf.tar.xz | tar --strip-components=1 -C /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/build/toolchain-external-custom --exclude='usr/lib/locale/*' -xf -
rm -rf /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/host/opt/ext-toolchain
mkdir -p /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/host/opt/ext-toolchain
mv /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/build/toolchain-external-custom/* /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/host/opt/ext-toolchain/
>>> toolchain-external-custom Patching
>>> toolchain-external-custom Configuring
Incorrect selection of the C library
make[1]: *** [package/pkg-generic.mk:283: /home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/build/toolchain-external-custom/.stamp_configured] Error 255
make: *** [Makefile:84: _all] Error 2#生成 SDK
bpkg make sdk 可能不行,进入对应output 文件夹下在makefile 目录下 输入 make sdk 将生成

make sdk
....
.....
...-location
>>> Generating SDK tarball
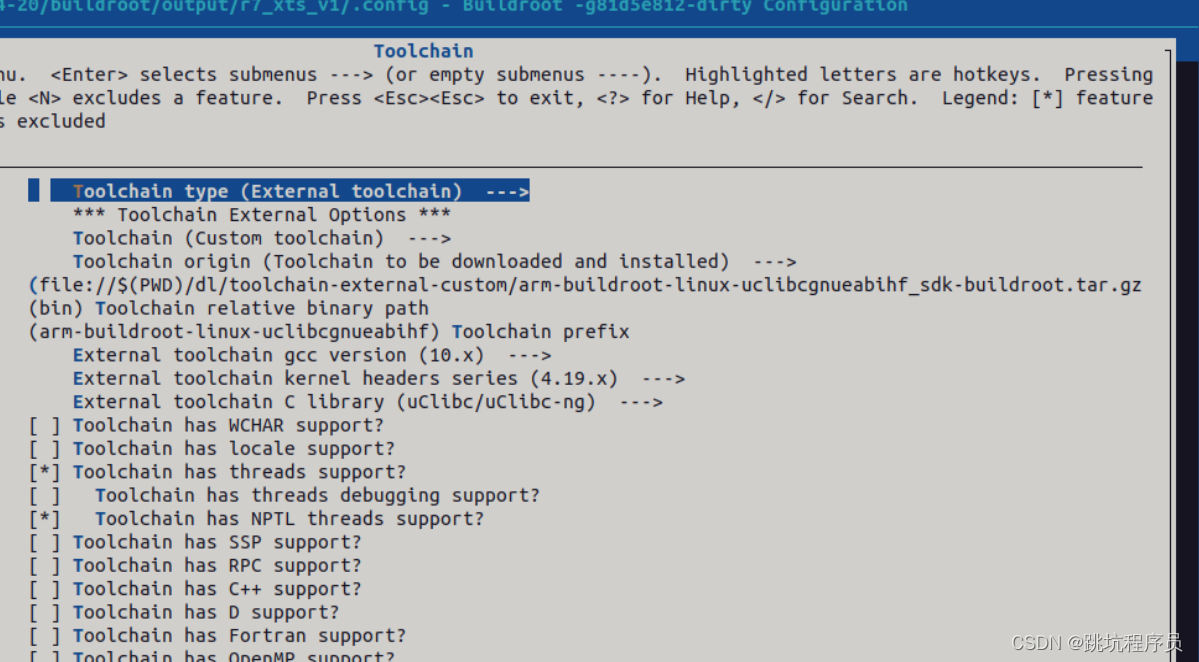
tar czf "/home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/images/arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot.tar.gz" \--owner=0 --group=0 --numeric-owner \--transform='s#^home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/host#arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot#' \-C / home/xts/linux_sdk/buildroot-4-20/buildroot/output/r7_xts_v1/host使用新的编译器
把编译器放到指定位置

bpkg menuconfig
BR2_TOOLCHAIN_EXTERNAL_HAS_SSP:堆栈粉碎保护(Stack Smashing Protection)
BR2_TOOLCHAIN_EXTERNAL_INET_RPC:是否支持RPC,远程过程调用,主要用于NFS
BR2_TOOLCHAIN_EXTERNAL_PATH:指定交叉编译链路径
BR2_TOOLCHAIN_HEADERS_AT_LEAST指定的版本要和交叉编译工具链的version.h中的一致,例如
NPTL 和LinuxThreads
NPTL 和LinuxThreads区别介绍
多线程最初是由 LinuxThreads 这个工程带入到 Linux 的,但是 LinuxThreads 并不符合 POSIX 在线程方面的标准。之后的原生 POSIX 线程库(Native POSIX Thread Library,NPTL)比 LinuxThreads 更符合标准,且克服了后者的许多缺陷。
output/r7_xts_v1/host/arm-buildroot-linux-uclibcgnueabihf/sysroot/usr/include/asm-generic/fcntl.h
-I…/…/output/r7_xts_v1/build/uclibc-1.0.41/include
编译异常 GNU_SOURCE支持处理
#define _GNU_SOURCE 1 启用 GNU C 库支持的 GNU 扩展。当您使用非标准函数和宏时定义它。就您而言,您尝试使用属于 POSIX 一部分的非标准函数,这就是您需要 #define _GNU_SOURCE 1 的原因。
您想要获得 _GNU_SOURCE 的全部效果,但要使用 BSD 定义优先于 POSIX 定义,使用 _GNU_SOURCE。
owner_ex.pid = syscall(SYS_gettid);owner_ex.type = F_OWNER_TID;fcntl(enc->fd_enc, F_SETOWN_EX, &owner_ex); /* this thread will receive SIGIO *///fcntl(enc->fd_enc, F_SETOWN, syscall(SYS_gettid)); /* this thread will receive SIGIO */

使能RPC SSP 和线程DEBUG可能会有编译错误
使用C++或关闭相关支持

这篇关于buidldroot musl uclib库 编译的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








