本文主要是介绍Ubuntu 16.04 下 PL-SLAM (Stereo) 的安装和使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Overview
欢迎访问 https://cgabc.xyz/posts/b4bebaf6/,持续更新
This code rubengooj/pl-slam contains an algorithm to compute stereo visual SLAM by using both point and line segment features.
-
Related Publication
@article{gomez2017pl,title = {{PL-SLAM: a Stereo SLAM System through the Combination of Points and Line Segments}},author = {Gomez-Ojeda, Ruben and Zuñiga-Noël, David and Moreno, Francisco-Angel and Scaramuzza, Davide and Gonzalez-Jimenez, Javier},journal = {arXiv preprint arXiv:1705.09479},year = {2017}
Prerequisites and Dependencies
-
Basics
sudo apt install build-essential pkg-config libboost-dev \ libsuitesparse-dev libeigen3-dev libyaml-cpp-dev -
OpenCV 3.x.x
- I installed OpenCV 3.3.1 along with ros-kinetic
-
G2O
- recommend version: commit id ff647bd (ff647bd7537860a2b53b3b774ea821a3170feb13)
-
MRPT/mrpt: The Mobile Robot Programming Toolkit
- recommend version: commit id 0c3d605 (0c3d605c3cbf5f2ffb8137089e43ebdae5a55de3)
git clone https://github.com/MRPT/mrpt.git git branch cg_0c3d605 0c3d605c3cbf5f2ffb8137089e43ebdae5a55de3 git checkout cg_0c3d605# install dependencies sudo apt install libdc1394-22-dev libjpeg-dev libftdi-dev freeglut3-dev \ libwxgtk3.0-dev zlib1g-dev libusb-1.0-0-dev libudev-dev libfreenect-dev \ libavformat-dev libswscale-dev libassimp-dev libgtest-dev libpcap-dev# build & install mkdir build & cd build cmake .. & make -j4 sudo make install -
rubengooj/stvo-pl: Stereo Visual Odometry by combining point and line segment features
git clone https://github.com/rubengooj/stvo-pl.git cd stvo-pl chmod +x build.sh ./build.sh
Note: it’s better mrpt, stvo-pl and pl-slam are in the same directory
Build
Build pl-slam
git clone https://github.com/rubengooj/pl-slam.git
chmod +x build.sh
./build.sh
Errors
- Q: /usr/bin/ld: cannot find -lg2o_ext_csparse
A:sudo ln -sv libg2o_csparse_extension.so libg2o_ext_csparse.so
Run
Dataset
- Kitti Dataset: data_odometry_gray (~22G)
Kitti data_odometry_gray
- edit
~/.bashrc, and
addexport DATASETS_DIR=<path-to-data_odometry_gray>/sequences - copy
pl-slam/config/dataset_params/kitti00-02.yaml
to<path-to-data_odometry_gray>/sequences/00/,
rename the yaml file todataset_params.yamland change it if necessary source ~/.bashrc- edit
pl-slam/config/config/config_kitti.yaml, change the value of vocabulary_p and vocabulary_l - run
./plslam_dataset 00 -c ../config/config/config_kitti.yaml -o 100 -s 1 -n 1000
or
./plslam_dataset 00 -c ../config/config/config_kitti.yaml -o 100 -s 1
Result
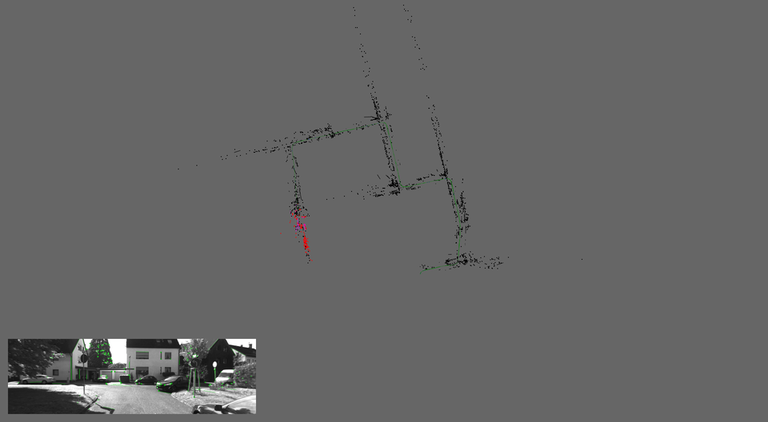
EuRoC MH_01_easy
- edit
~/.bashrc, and addexport DATASETS_DIR=<path-to-MH_01_easy> - copy
pl-slam/config/dataset_params/euroc_params.yamlto<path-to-MH_01_easy>/mav0/,
rename the yaml file todataset_params.yamland change it if necessary source ~/.bashrc- edit
pl-slam/config/config/config_euroc.yaml, change the value of vocabulary_p and vocabulary_l - run
./plslam_dataset mav0 -c ../config/config/config_euroc.yaml -o 100 -s 1
Run Errors
-
the app crashed and get the following error when restart the app after close it with
Ctrl+CDRM_IOCTL_I915_GEM_APERTURE failed: Invalid argument
Assuming 131072kB available aperture size.
May lead to reduced performance or incorrect rendering.
get chip id failed: -1 [22]
param: 4, val: 0
Segmentation fault (core dumped)and it fixed after reinstalling Nvidia-driver
-
the app crashed with the error
Segmentation fault (core dumped)after runFrame #1600with the KITTI data_odometry_gray dataset, but have not solved it
这篇关于Ubuntu 16.04 下 PL-SLAM (Stereo) 的安装和使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






