本文主要是介绍统计学习方法笔记-K近邻法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
k近邻法是一种基本分类与回归方法,这儿只讨论分类问题中的k近邻法。k近邻法输入为实例的特征向量,输出为实例的类别,可以取多类。
K近邻算法
简介:
给定一个训练数据集,对新输入的实例,在训练数据集中找到与其最近邻的k个实例,这k个实例的多数属于某个类,就把该输入实例分为这个类。
算法:
1、根据给定的距离度量,在训练集中找出实例x最邻近的k个实例,涵盖这k个实例的x的领域记作 
2、在  中根据分类决策规则(如多数表决)决定x的类别y:
中根据分类决策规则(如多数表决)决定x的类别y:
中根据分类决策规则(如多数表决)决定x的类别y:

其中I()为指示函数,即yi = cj时,I()为1,否则为0
k近邻模型
模型:
特征空间中,对每个训练实例点xi,距离该点比其他点更近的区域,叫作单元。所有实例点的单元构成对特征区域的划分。最近邻法讲实例xi的类yi作为其单元中所有点的类标记。
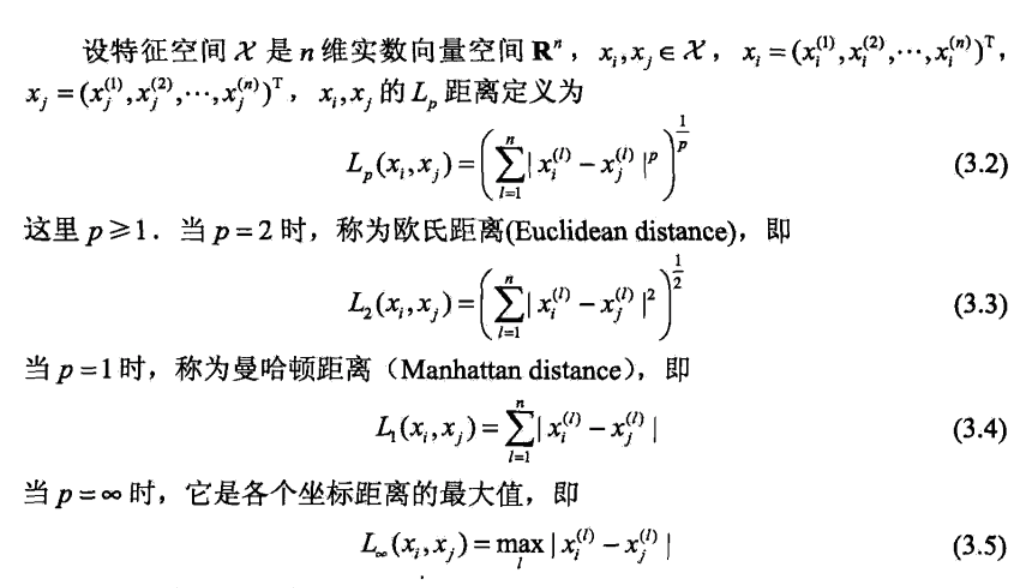
距离度量:
特征空间中两个实例点的距离是两个实例点相似度的反映。k近邻法一般使用的距离是欧氏距离,但也可以是其他距离。
k值的选择:
选择较小的k值,学习的近似误差减小,但学习的估计误差会增大,预测结果对近邻的实例点非常敏感,如果近邻的实例点恰好是噪声,预测就会出错。也就是说k值减小,意味着模型变得复杂,更容易发生过拟合。
选择小的k值,可以减小估计误差,但是会增大近似误差,k值的增大意味着模型变得简单。
在应用中,k值一般去一个比较小的值,通常采用交叉验证法来选取最优k值。
分类决策规则:
k近邻法中分类决策规则往往是多数表决。误分类率是:
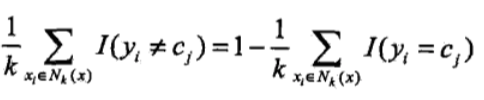
要使误分类率最小即经验风险最小,就得让  最大,所以多数表决等价于经验风险最小。
最大,所以多数表决等价于经验风险最小。
最大,所以多数表决等价于经验风险最小。
kd树
构造kd树:
1、开始:构造根结点,根结点对应于包含T(T为训练数据集)的k维空间的超矩形区域。
选择x¹为坐标轴,以T中所有x¹的中位数为切分点,将根结点对应的超矩形区域切分成两个子区域,切分由通过切分点并与坐标轴x¹垂直的超平面实现。
由根结点生成深度为1的左、右子结点:
2、重复:对深度为j的结点,选择 x ( l ) 为切分的坐标轴,l = j(mod k) + 1,以该结点的区域中所有实例的x( l )坐标的中位数为切分点(如果是偶数个,也可以最中间二者选其一),将该结点对应的超矩形区域切分为两个子区域。切分由通过切分点并且与坐标轴x( l )垂直的超平面实现。
由该结点生成深度为j + 1的左、右子结点:左子结点对应坐标x( l )小于切分点的子区域,右子结点对应坐标x( l )大于切分点的子区域。
将落在切分超平面上的实例点保存在该结点。
搜索kd树:
1、在kd树中找出包含目标点x的叶结点:从根节点出发,递归向下访问kd树。若目标点x当前维的坐标小于切分点坐标,则移动到左子结点,否则移动到右子结点,直到子结点为叶结点为止。
(之所以上面这个过程没有判断等于(即目标点正好为某个父结点的特例),是因为单个维度等于不足以确定就是某个类,而目标点和训练点所有特征值相等的可能性太低,而单一特征值相等的可能性要高些,要是每出现某个纬度一样就对比所有特征值效率太低,所以干脆往右移,最终确定的一个叶结点。就算此时目标点正好是某个父节点甚至根节点这样的特例(可能性太低太低),最终也会找出这个父节点就是最近点,不会出现找出错误最近点的情况,总的来说不判断特殊情况利大于弊)
(我之前的观点:如果目标点当前维大于切分点坐标,且当前所在子结点只有左子结点并没有右子结点,那么就停留在当前结点。
这个观点有点问题,如果按照接下来的算法,这个观点不会在当前结点的区域下遍历找最近点,而是直接跳到父节点,所以具体实现还是得我找时间看kd树搜索算法的实现!)
2、以此叶结点为“当前最近点”
3、递归的向上回退,在每个结点执行以下操作:
a、如果该结点保存的实例点比当前最近点距离目标点更近,则以该实例为“当前最近点”(父结点在这个时候进行距离比较)
b、当前最近点一定存在于该结点一个子结点对应的区域。检查该子结点的父结点的另一个子结点对应的区域是否有更近的点。具体的,检查另一个子结点对应的区域是否与以目标点为球心,以目标点与“当前最近点”的距离为半径的超球体相交。
如果相交,可能在另一个子结点对应的区域存在距目标点更近的点,移动到另一个子结点,接着,递归地进行最近邻搜索(自解释:如果这个子结点的度不为0,则从选择叶结点步骤开始,否则直接比较此节点保存的唯一实例点);
如果不相交,向上回退。(子结树的所有点都不用比较了,这个时候效率就体现出来的)
4、当回到根节点时,搜索结束,最后的“当前最近点”即为x的最近邻点
这篇关于统计学习方法笔记-K近邻法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







