本文主要是介绍光速入门python的OpenCV,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
欢迎来到我的博客
个人主页:北岭敲键盘的荒漠猫-CSDN博客

本文整理python的OpenCV模块的关键知识点
争取用最短的时间入门OpenCV
并且做到笔记功能直接复制使用

OpenCV简介
不浪费时间的介绍:
就是类似于ps操作图片。
至于为什么不直接用ps,因为只有程序能完成ps的操作,这样才能完全自动化2小时不间断的执行一些程序,总不能执行到一定地方要等你人为的在ps中做好图片再来执行程序吧。
功能点罗列:
画图,图片高斯模糊,腐蚀膨胀等处理,开启摄像头。
最基本的使用
导入模块:import cv2| 方法 | 作用 |
|---|---|
| cv2.getVersionString() | 返回OpenCV的版本 |
| cv2.imread(文件地址,图片灰彩类型) | 读取文件,用于实例化对象 灰彩类型:(可以不写) cv2.IMREAD_COLOR读入彩色图像cv2.IMREAD_GRAYSCALE读入灰色图像 |
| 对象.shape | 返回图片的大小(像素) |
| cv2.imshow(窗口名,图片对象) | 返回个窗口用于展示这个图片 |
| cv2.waitKey(自动关闭时间) | 窗口不自动关闭,知道按下任意键或者到规定时间(时间为微秒) 返回他按得键的代号数字 到时间返回-1 |
| cv2.imwrite(保存路径和文件名,保存的图片) | 保存编辑的图片 |
注意:
这个库不支持任何中文!!!!!
不管是图片文件命名还是窗口等
一律别用中文!!!!!!!
(至少我的版本不支持任何中文)
案例演示:
import cv2#导入库
print(cv2.getVersionString())#返回版本号
image=cv2.imread("konglong.jpg")#导入图片,实例化
print(image.shape)#返回图片的大小和通道cv2.imshow("阿萨德",image)#展示图片
cv2.waitKey(1000)#设置暂停
cv2.imwrite("okok.jpg",image)#保存图片结果:
打印信息

保存okok图片
展示图片(代码中用中文做窗口所以会乱码)

视频的打开方式
我们视频有两种:摄像头,视频文件
用到的函数:
读取视频或摄像头:cv2.VideoCapture(视频或者摄像头的指针)
返回视频读取的照片:cap.read()
开启摄像头
思路:原理就是对这摄像头一遍遍截图。然后我们不断的刷新显示的图片。
代码如下:
import cv2#导入库
cap=cv2.VideoCapture(0)#读取摄像头
while True:#循环valu,video=cap.read()#读取摄像头内容show=cv2.imshow("video",video)#展示摄像头key=cv2.waitKey(1)#设置等待0.001秒刷新一次print(key)if key!=-1:#如果不是到时间刷新的视频就退出视频break
结果如下:

按下别的键就关闭了。(字母有时候不行,数字或者特殊按键相对靠谱点)
视频打开方式
代码:
import cv2#导入库
cap=cv2.VideoCapture("bingdu.mp4")
while True:valu,video=cap.read()show=cv2.imshow("video",video)key=cv2.waitKey(1)print(key)if key!=-1:break基本一样不截图了
灰度图获取与处理
介绍:OpenCV储存图片实际上是储存三原色的三张图片,最后整合在一起。采用bgr图像。
灰度加权平均:
cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)展示隔色彩图像:
cv2.imshow("blue",image[:,:,0])
cv2.imshow("green",image[:,:,1])
cv2.imshow("red",image[:,:,2])
用法演示:(图片太大不展示效果了)
import cv2
image=cv2.imread("konglong.jpg")
cv2.imshow("blue",image[:,:,0])
cv2.imshow("green",image[:,:,1])
cv2.imshow("red",image[:,:,2])
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
cv2.imshow("gray",gray)
cv2.waitKey()裁剪图像
crop=image[y轴开始裁剪位置:结束位置,x轴开始裁剪位置:结束位置]水平为x,垂直为y
案例演示:
import cv2
image=cv2.imread("konglong.jpg")
print(image.shape)
y,h,x,w=100,300,100,600
crop=image[y:h,x:w]
cv2.imshow("crop",crop)
cv2.waitKey()
图形绘制
可用于标记识别的物品
(注意,所有的粗细参数输入负数后就是填充图像)
绘制直线
cv2.line(图片, 起点坐标, 终点坐标, 颜色, 粗细)案例演示
import cv2
image=cv2.imread("okok.jpg")
cv2.line(image,(0,0),(700,600),(255,45,65),4)
cv2.imshow("image",image)
cv2.waitKey()效果演示:
绘制方形
cv2.rectangle(图片, 起点坐标, 终点坐标, 颜色, 粗细)案例演示
import cv2
image=cv2.imread("okok.jpg")
cv2.rectangle(image,(309,310),(344,352),(255,45,65),4)
cv2.imshow("image",image)
cv2.waitKey()
绘制圆形
cv2.circle(image,原点坐标,半径,颜色,粗细)案例演示:
import cv2
image=cv2.imread("okok.jpg")
cv2.circle(image,(329,329),30,(255,45,65),4)
cv2.imshow("image",image)
cv2.waitKey()
椭圆绘制
cv2.ellipse(图片, 中心点坐标, 横纵轴长度(元组), 旋转角度, 起始角度, 结束角度, 颜色, 粗细)案例演示:
import cv2
image=cv2.imread("okok.jpg")
cv2.ellipse(image, (256, 256), (100, 50), 60, 0, 360, (0, 255, 0), -1)
cv2.imshow("image",image)
cv2.waitKey()

绘制文字
cv2.putText(图片, 文字, 位置, 字体, 文字大小, 颜色, 粗细)案例演示:
import cv2
image=cv2.imread("okok.jpg")
cv2.putText(image, "how cool am i!", (250, 350), cv2.FONT_HERSHEY_SIMPLEX, 2, (65,54,87), 2)
cv2.imshow("image",image)
cv2.waitKey()噪点处理
噪点描述:拍摄时信号传输收到干扰产生的杂色,如下:

噪点处理,其实就是让他变模糊,模糊之后边界就会不明显。但是也会影响一定的画面。
所以一般情况下,是对图像的局部噪点严重的区域进行区域内的噪点处理。
注意下面的核必须是奇数。
高斯模糊
cv2.GaussianBlur(图像,高斯核,sigmaX,sigmaY,边界样式)
x与y差越大越模糊,0的话就是自行计算
实际上一般可以用下面形式进行使用
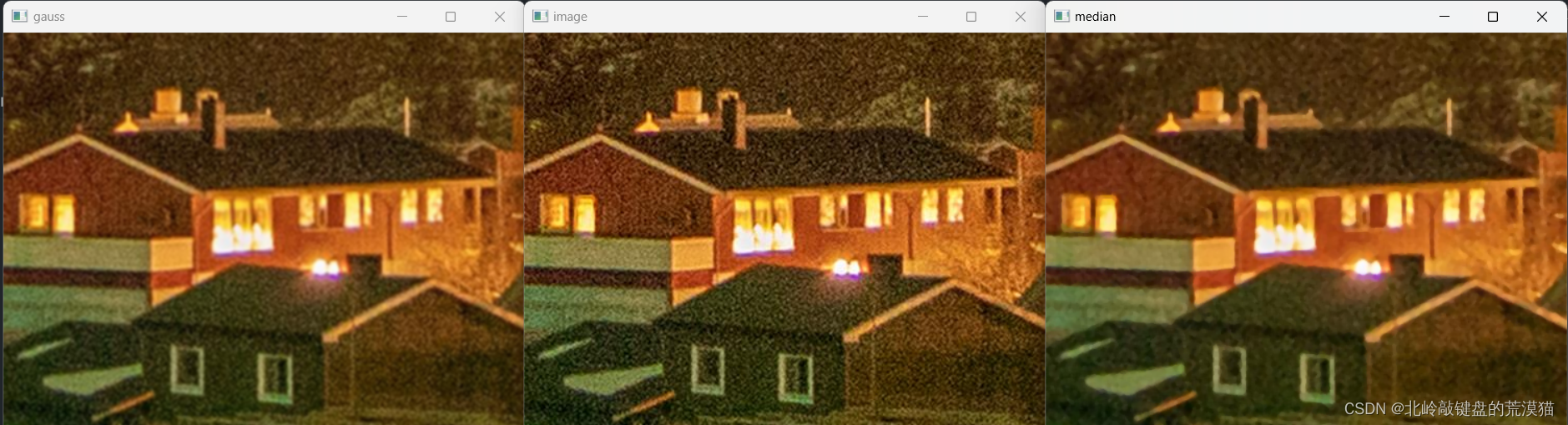
cv2.GaussianBlur(image,(5,5),0)中值滤过(像素排序取中值平滑处理)
cv2.medianBlur(图片,核)案例演示
import cv2
image=cv2.imread("zaodian.jpeg")
cv2.imshow("image",image)
gauss=cv2.GaussianBlur(image,(5,5),0,11)
cv2.imshow("gauss",gauss)
median=cv2.medianBlur(image,5)
cv2.imshow("median",median)
cv2.waitKey()效果演示
图片特征提取
(但是OpenCV提取图像特征的水平有限,如果需要特别的精准可以尝试别的库)
提取图片的特征,比如说转角,边缘,纹理啥的。
提取思路:先把图像给转化为灰度图,然后在灰度图中匹配转角这类的特征。
函数:
cv2.cvtColor(图片,cv2.COLOR_BGR2GRAY) #灰度处理
cv2.goodFeaturesToTrack(图片,最大特征数,点的质量,特征最小的距离)
.ravel()#点的坐标案例演示
import cv2
image=cv2.imread("okok.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
corners=cv2.goodFeaturesToTrack(gray,500,0.1,10)
for corner in corners:x,y=corner.ravel()cv2.circle(image,(int(x),int(y)),2,(255,0,255),-1)
cv2.imshow("corners",image)
cv2.waitKey()
其实这些特征提取也不是特别的精准,看图中的特征点也能看出来,这些特征点也不足以准确的识别这个画面。
图片匹配
原理:
也是把指定的图片转化为灰度图,然后找特征点,之后在指定的图片中匹配有没有相似的特征点。
缺点:
对图片的大小敏感。也就是说我们给的图片距离镜头20m,但是在指定的图片中,这个图片在镜头50m的地方,就会因为大小不同而匹配不到。
解决思路:
可以改变图像的大小进行多次匹配,或者减少匹配的精度要求(误判多)。
(用到了numpy模块)
函数
灰度处理:cv2.cvtColor(图片,cv2.COLOR_BGR2GRAY)
匹配图像:cv2.matchTemplate(gray_video, target, cv2.TM_CCOEFF_NORMED)
获取坐标:numpy.where(match >= 匹配相似度)案例演示
(我写的这个识别度不是很高,不过能识别基本的功能,有点人工智障)
调用摄像头实时识别书本上的java。
代码案例
import cv2
import numpy as np
image=cv2.imread("java.jpg")
video=cv2.VideoCapture(0)
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
x1,y1=617,608
x2,y2=967,734
target=gray[y1:y2,x1:x2]
cv2.imshow("okk",target)
h,w=target.shape[0:2]
print("{},{}".format(h,w))
a=1
while True:#循环valu,video1=video.read()#读取摄像头内容gray_video=cv2.cvtColor(video1,cv2.COLOR_BGR2GRAY)if a==1:a=2cv2.imshow("okkk",gray_video)match = cv2.matchTemplate(gray_video, target, cv2.TM_CCOEFF_NORMED)place = np.where(match >= 0.9)print(place)for p in zip(*place[::-1]):x_1, y_1 = p[0], p[1]x_2, y_2 = x_1 + w, y_1 + hprint(x_1,x_2)cv2.rectangle(video1,(x_1, y_2),(x_2, y_2),(156, 124, 21), 1)show=cv2.imshow("video",video1)#展示摄像头key=cv2.waitKey(1)#设置等待0.001秒刷新一次if key!=-1:#如果不是到时间刷新的视频就退出视频break效果演示
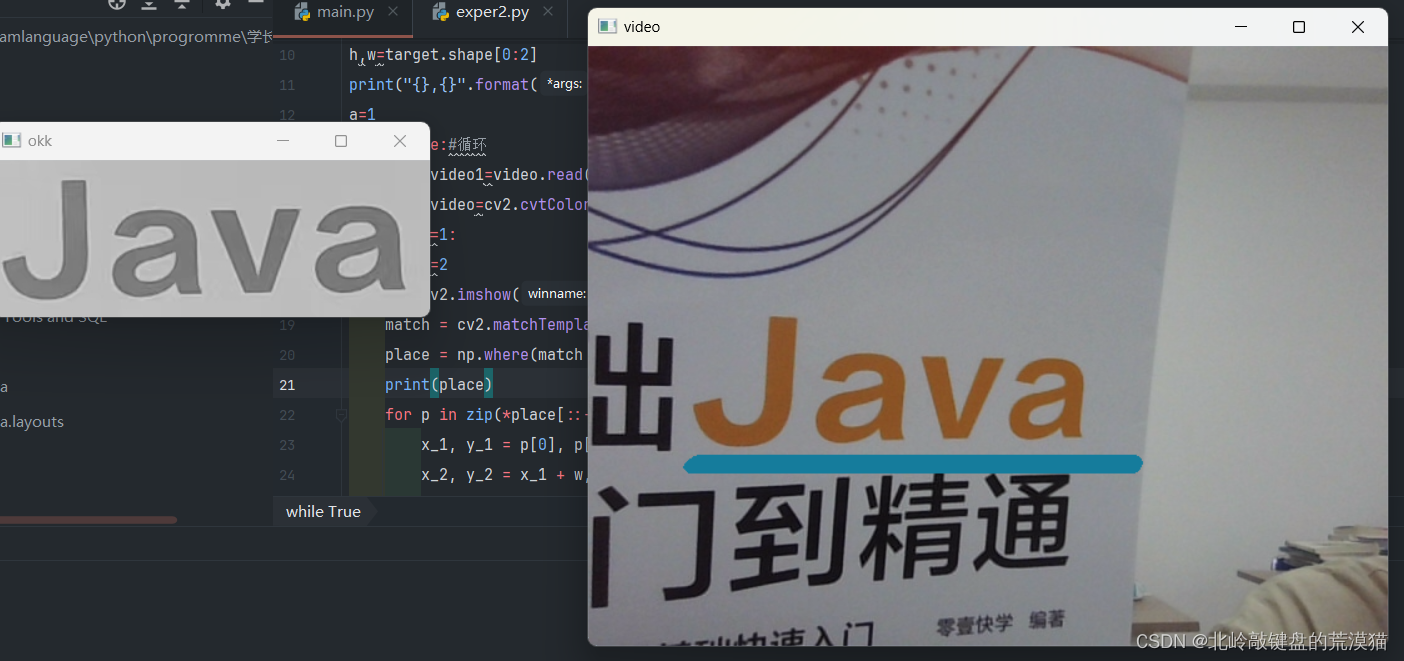
嗯人工智障,识别条件特别苛刻。
不过也算是能够完成实时识别的功能了。
图像梯度算法
简介一下图像梯度:
图像梯度就像地理地图的等高线一样。
给我们分辨一个区域的图像像素变化的强度,如果他变化强度比较大,那么他大概率是图形的边缘。可以利用图像的梯度来分辨图像中的不同的物体。
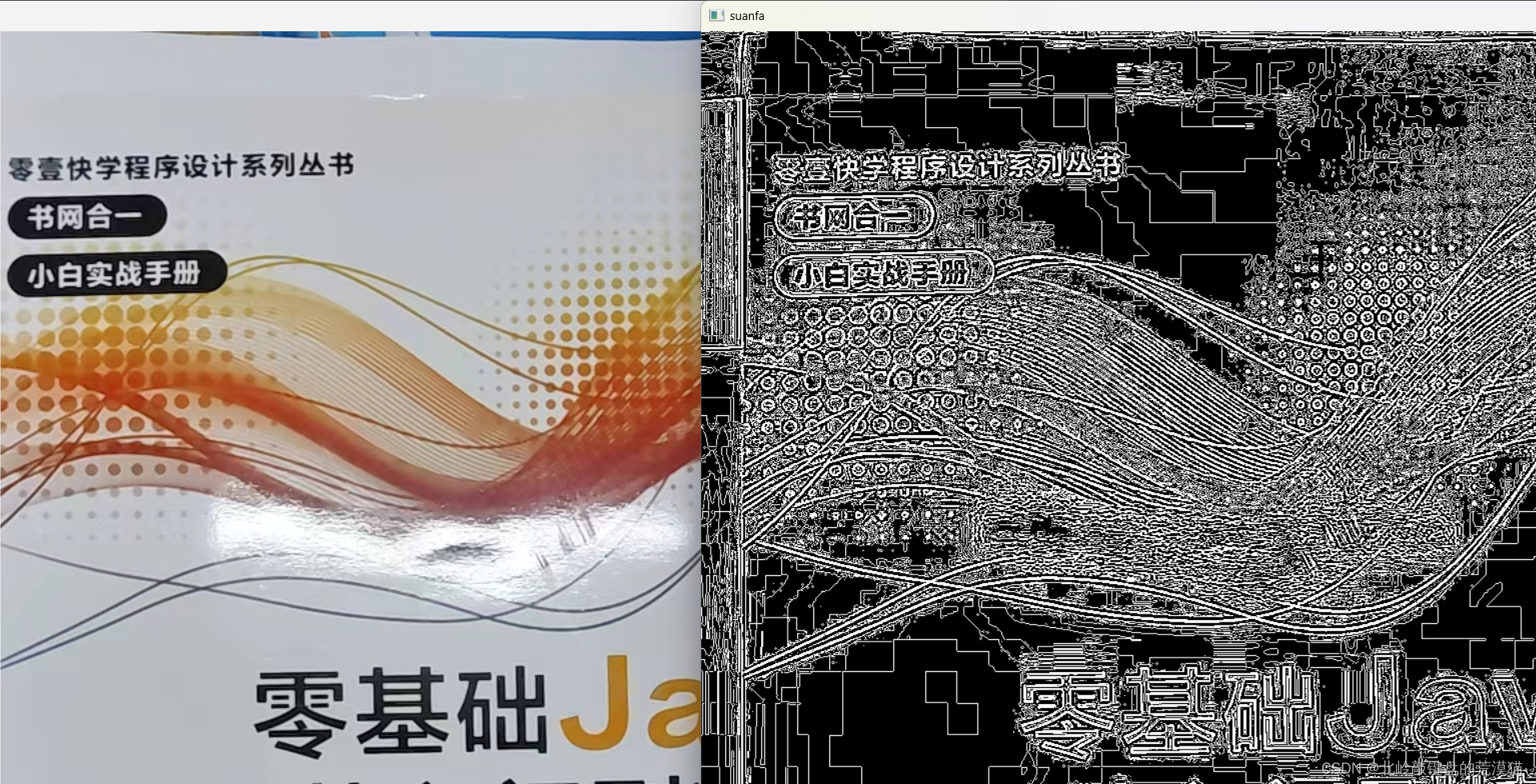
拉普拉斯算子
作用:利用梯度的方法检测图像边缘,轮廓以及纹理。
函数:
常用写法:cv2.Laplacian(图片,cv2.CV_64F)
完整写法:cv2.Laplacian(image, dest, ddepth, ksize, scale, delta, borderType)
image是输入图像,dest是输出图像,ddepth是输出图像的深度,ksize是卷积核的大小,scale是拉普拉斯算子的系数案例演示:
import cv2
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
laplacian=cv2.Laplacian(gray,cv2.CV_64F)
cv2.imshow("yuantu",image)
cv2.imshow("suanfa",laplacian)
cv2.waitKey()效果演示:
canny算子
函数:
cv2.Canny(gray,边缘1,边缘2)
原理:
像素变化强度大于边缘2被判定为是边界,小于边界1被判定为不是边界。在两者之间的区域根据已经判断的区域进行判断。
源码如下:
import cv2
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
canny=cv2.Canny(gray,100,200)
canny2=cv2.Canny(gray,50,100)
cv2.imshow("yuantu",image)
cv2.imshow("canny",canny)
cv2.imshow("canny2",canny2)
cv2.waitKey()效果演示:
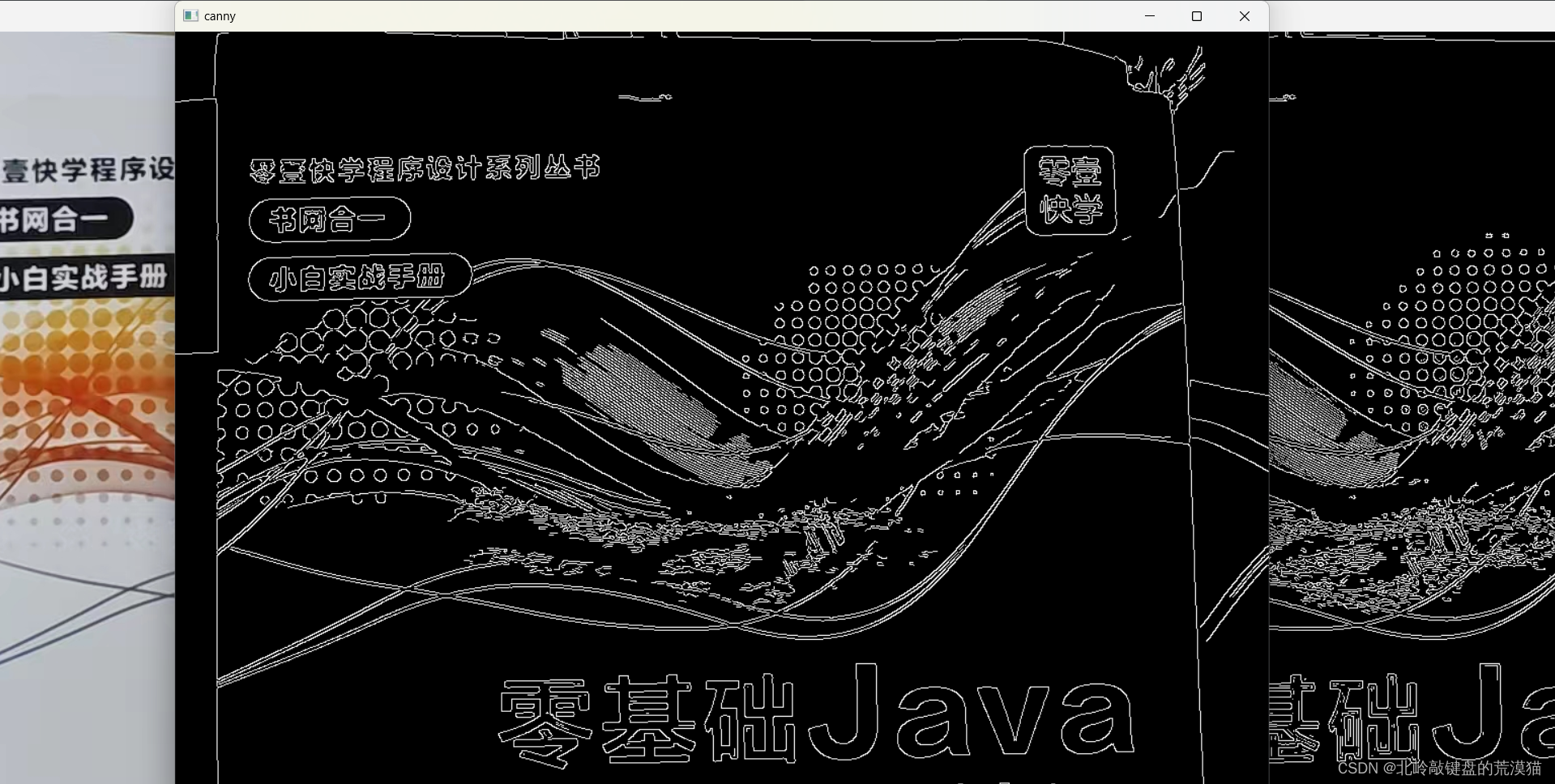
好处就是自己能规定他判断的严格程度。
阈值算法(二值化)
普通算法
描述:众所周知,我们世界的颜色并不是绝对的黑白,我们由黑白之间可以配出很多种灰色。
我们就可以用这个原理来把这些灰色绝对化。满足某个值的就变成黑色,不满足的就是白色。
这样就可以识别一些黑暗环境中的文字或者物品。
(但也别指望太准,要是拿个你自己都分辨不出来的图片,用这个也不容易。。。)
函数
cv2.threshold(图片,阈值,最大灰度,处理方法)
本案例用的函数:cv2.threshold(gray,100,255,cv2.THRESH_BINARY)
(因为这张照片环境明堂堂的。。。)案例演示
import cv2
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
ret,binary=cv2.threshold(gray,100,255,cv2.THRESH_BINARY)
cv2.imshow("binary",binary)
cv2.waitKey()效果演示
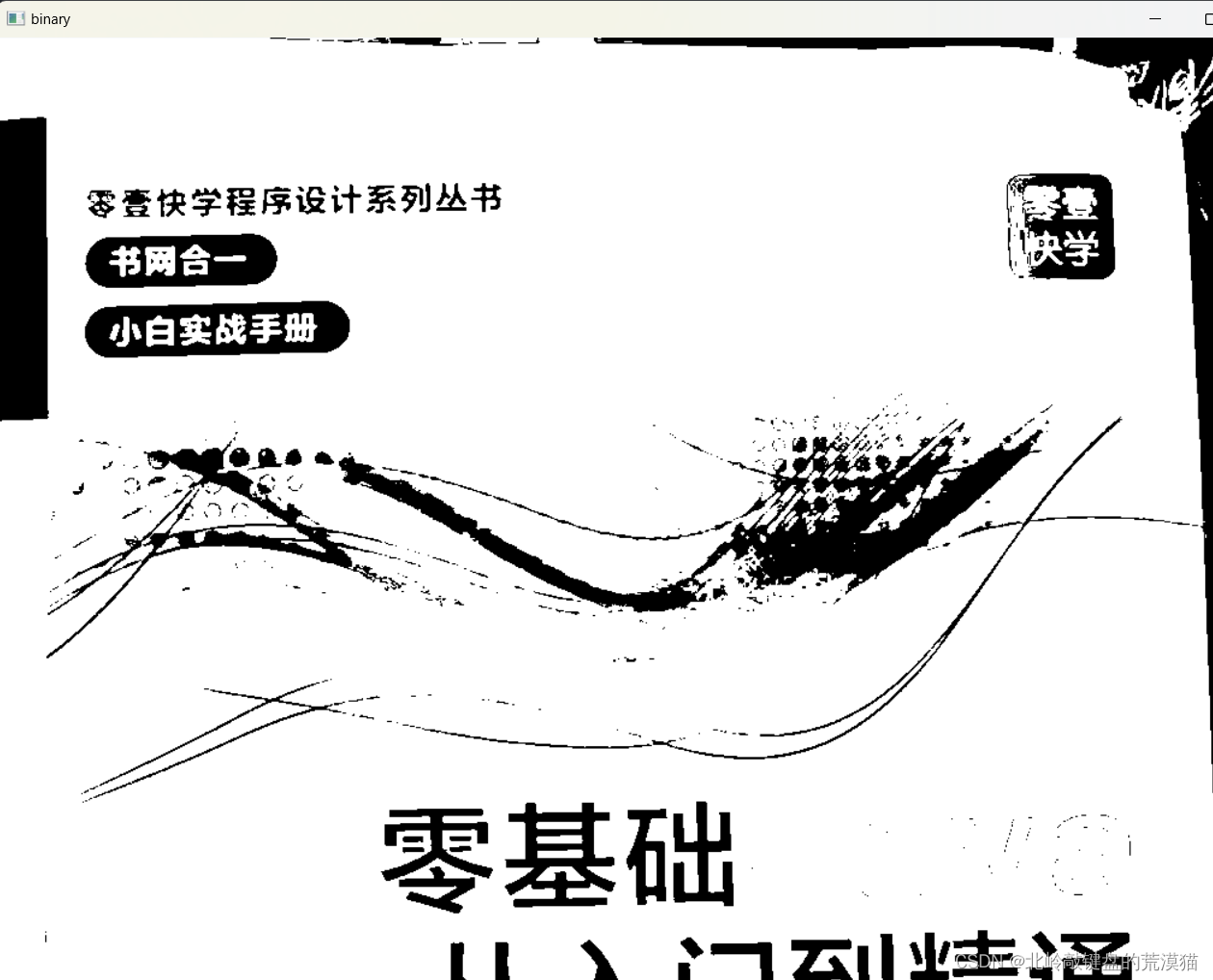
分区二值化算法
OpenCV有内置的分区二值化算法,自动计算这个小区域的阈值,并设定合适的阈值。
函数
函数:(案例)
cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,115,1)该函数有以下参数:src: 要二值化的原始图像。maxval: 阈值的最大值。adaptiveMethod: 用于计算阈值的方法。有两个选项可供选择:cv2.ADAPTIVE_THRESH_MEAN_C和cv2.ADAPTIVE_THRESH_GAUSSIAN_C。推荐使用默认的cv2.ADAPTIVE_THRESH_GAUSSIAN_C。thresholdType: 阈值类型。可以是cv2.THRESH_BINARY或cv2.THRESH_BINARY_INV。推荐使用默认的cv2.THRESH_BINARY。blockSize: 每个局部区域的大小,用来计算局部阈值。C: 从平均值或加权平均值中减去的常数。该参数在计算局部阈值时起到调整阈值的作用。案例演示
import cv2
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
binary_adaptive=cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,115,1)
cv2.imshow("binary",binary_adaptive)
cv2.waitKey()结果演示
可以看到,明显的比自己写的那个好用。
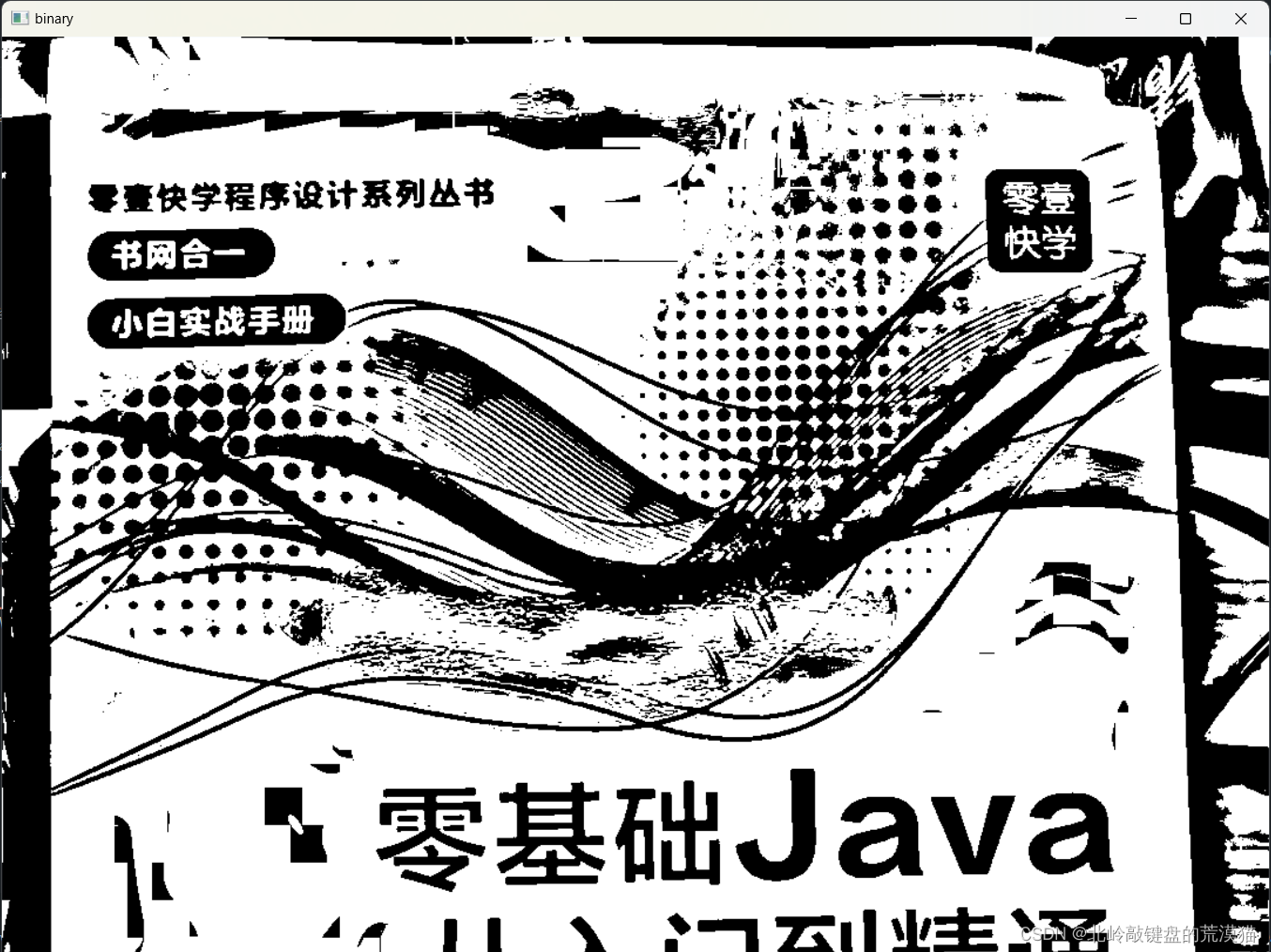
大金算法
算法原理:找两个最大的值,然后取两个值的中心。让黑白差异最大化。
函数
cv2.threshold(gray,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)好处
完全不用咱们自己设置阈值,他自己就可以设置的明明白白的。
但是也有缺点,不如自己设置的完美,有时候可能不是很好用。
案例演示
import cv2
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
ret1,binary_otsu=cv2.threshold(gray,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
cv2.imshow("binary",binary_otsu)
cv2.waitKey()效果演示
腐蚀与膨胀
腐蚀:就是给图像变瘦一点(减少白色)
膨胀:相反,给图像变胖一点(增加白色)
作用:可以处理图像边缘,放大或者缩小图像的细节。
函数
他们都需要创建一个核
np.ones((5, 5), np.uint8)膨胀与腐蚀
cv2.erode(图像, kernel) # 腐蚀
cv2.dilate(图像, kernel) # 膨胀案例演示:
import cv2
import numpy as np
image=cv2.imread("java.jpg")
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
ret1,binary_otsu=cv2.threshold(gray,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
kernel = np.ones((5, 5), np.uint8)
erosion = cv2.erode(binary_otsu, kernel) # 腐蚀
dilate = cv2.dilate(binary_otsu, kernel) # 膨胀
cv2.imshow("binary",binary_otsu)
cv2.imshow("er",erosion)
cv2.imshow("di",dilate)
cv2.waitKey()效果演示:
腐蚀
膨胀

这里看到,明明是腐蚀但是感觉像是做出膨胀的效果,这是因为这个是腐蚀白色。所以对于黑色来说是膨胀了。
总结
OK,这些就是OpenCV的基础了。
他还有很多深入的算法,需要自己挖掘。
掌握了这些就能实现一些基本的功能了。
这篇关于光速入门python的OpenCV的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






