本文主要是介绍Halcon 极坐标转换图像,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、概述
先看效果

将圆形的用极坐标转换成矩性然后再进行识别或者其他缺陷检测,最后在还圆到原图中
二、原理:
halcon 圆环类缺陷检测的一种方法(极坐标变换法)_halcon缺口检测-CSDN博客
图像极坐标变换与反变换(Halcon + OpenCV)_将 环形虹膜图像的极坐标转换成矩形图像-CSDN博客
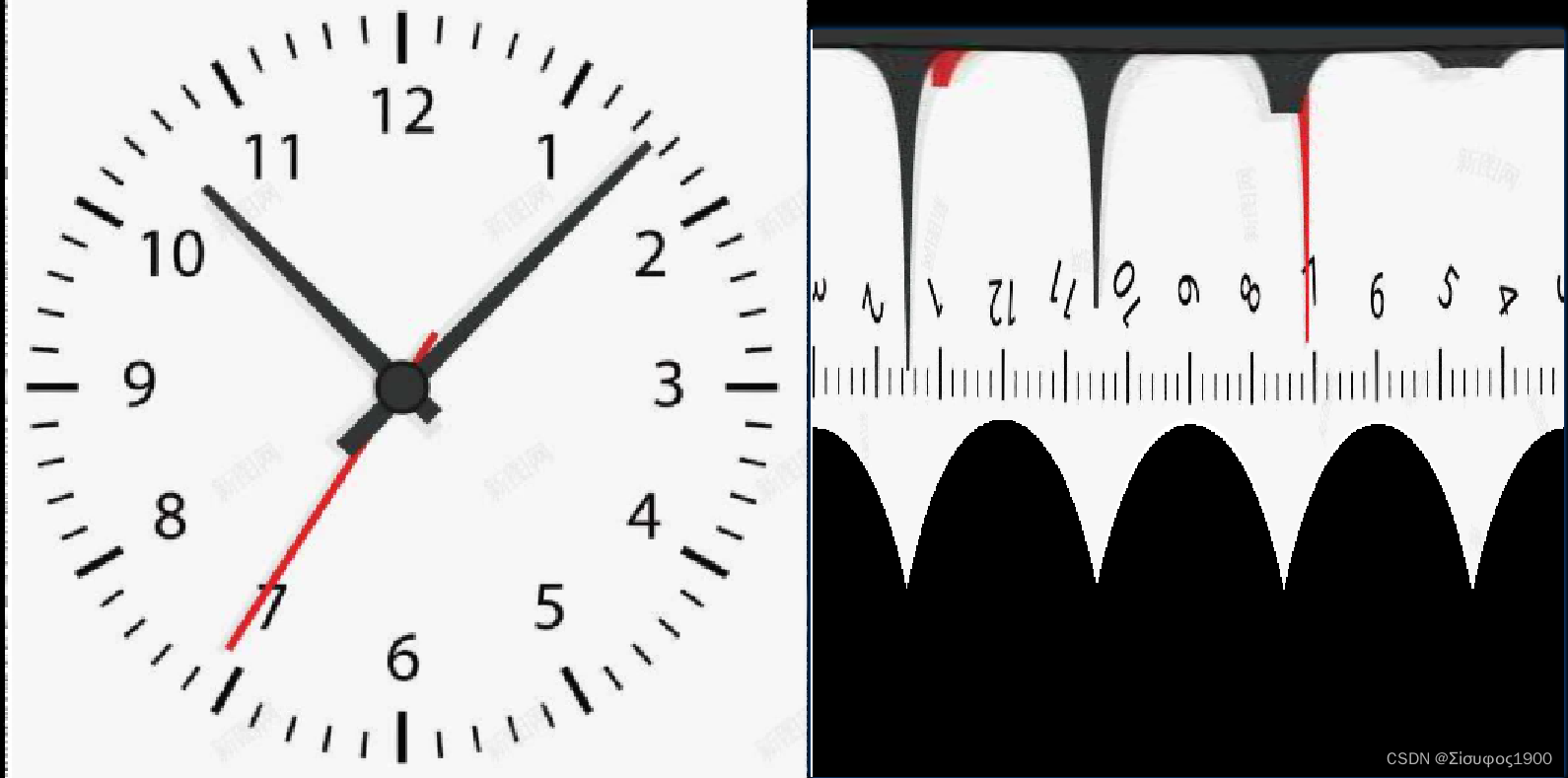
极坐标转换: 圆形图像--》矩形图像
原理:
三、实践
案例一
dev_open_window (0, 0, 512, 512, 'black', WindowHandle)
read_image (Beer, '/tem.png')
get_image_size (Beer, Width, Height)
draw_circle (WindowHandle, Row1, Column1, Radius)
gen_circle (Circle, Row1, Column1, Radius)
reduce_domain (Beer, Circle, ImageReduced)
PI:=3.1415926
*WidthPolar := (OuterRadius - 5)*2*3.14
W:=(Radius-150)*2*3.14
H:=300
*逆时针,从0度到360度,转一圈
* 原始图像 极坐标之后的图像 图像中心坐标row col 起始角度 终止角度 开始半径 结束半径 差值方式
polar_trans_image_ext (ImageReduced, PolarTransImage, Row1, Column1, 0, 2*PI, 0, Radius*2, W, H, 'bilinear')dev_display (ImageZoomed)
*长和宽必须是原图像的长和宽,否则尺寸太小的话,图像容易超出,导致一片黑,看不到转换结果
*极坐标图像转笛卡尔坐标系图像 恢复之前的图像
polar_trans_image_inv (PolarTransImage, RestoreImage, Row1, Column1, 0, 2*PI, 0, Radius, Width, Height, 'bilinear')
write_image (RestoreImage, 'jpeg 100', 0, 'd:\\2.jpg')*点坐标的转换
*Contour的原坐标是基于极坐标系,我们把它转到笛卡尔坐标系
gen_contour_polygon_xld (Contour, [155.568, 137.404, 30], [47.4712, 116.479, 260])
polar_trans_contour_xld_inv (Contour, XYTransContour, Row1, Column1, 0, 2*PI, 0, Radius, Width, Height, Width, Height)
案例二、
dev_update_off ()
get_system ('clip_region', Information)
set_system ('clip_region', 'true')
read_image (Image, 'barcode.png')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowHandle)
dev_set_colored (12)
dev_display (Image)
stop ()
* 分割包含条形码的CD上的环。
threshold (Image, Region, 0, 100)
closing_circle (Region, Region, 3.5)
connection (Region, ConnectedRegions)
*筛选出圆环
select_shape (ConnectedRegions, Ring, ['width','height'], 'and', [550,550], [750,750])
shape_trans (Ring, OuterCircle, 'outer_circle')
complement (Ring, RegionComplement)
connection (RegionComplement, ConnectedRegions)
select_shape (ConnectedRegions, InnerCircle, ['width','height'], 'and', [450,450], [650,650])
*提取并生成圆环区域外圆,内圆
* 确定包含条形码的环的参数。
smallest_circle (Ring, Row, Column, OuterRadius)
smallest_circle (InnerCircle, InnerRow, InnerColumn, InnerRadius)
dev_set_color ('green')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Image)
dev_display (OuterCircle)
dev_display (InnerCircle)
stop ()
* 现在读条形码。这是通过计算包含条形码的图像中圆环的极坐标变换来实现的。
* WidthPolar := 1440
*内圆的周长
WidthPolar := (OuterRadius - 5)*2*3.14
HeightPolar := round(OuterRadius - InnerRadius - 10)
*极坐标变换(中心Row, Column,用圆环的圆心坐标。起始角度是0到360度。起始半径分别是圆环内圆的半径和外圆的半径。
*宽高分别是圆环外圆的周长和外圆半径减去内圆半径的值)
polar_trans_image_ext (Image, PolarTransImage, Row, Column,0, rad(360), InnerRadius + 5, OuterRadius - 5, WidthPolar, HeightPolar, 'bilinear')
*逆向转换回圆环图像,以查看此函数效果
polar_trans_image_inv (PolarTransImage, XYTransImage, Row, Column, 0, rad(360), InnerRadius + 5, OuterRadius - 5, Width, Height, 'nearest_neighbor')
invert_image (PolarTransImage, ImageInvert)
* 由于条形码区域相当平坦,因此图像的高度增加了一倍。
zoom_image_factor (ImageInvert, ImageZoomed, 1, 2, 'weighted')
get_image_size (ImageZoomed, Width1, Height1)
dev_resize_window_fit_size (0, 0, Width1, Height1, -1, -1)
dev_display (ImageZoomed)
stop()
create_bar_code_model ([], [], BarCodeHandle)
* 条形比较小,对比度也低;因此,阈值从0.05提高到0.1。
set_bar_code_param (BarCodeHandle, 'element_size_min', 1.5)
set_bar_code_param (BarCodeHandle, 'meas_thresh', 0.3)
find_bar_code (ImageZoomed, SymbolRegions, BarCodeHandle, 'Code 128', DecodedDataStrings)
clear_bar_code_model (BarCodeHandle)
dev_set_window_extents (-1, -1, WidthPolar / 2, HeightPolar)
dev_display (ImageZoomed)
dev_display (SymbolRegions)
set_system ('clip_region', Information)
disp_message (WindowHandle, DecodedDataStrings, 'image', 10, 180, 'black', 'true')
stop ()* 主要是要显示到原来的那个区域
* 将条码区域转换回原始图像并显示。
zoom_region (SymbolRegions, SymbolRegions, 1, 0.5)
polar_trans_region_inv (SymbolRegions, CodeRegionCircular, Row, Column, 0, rad(360), InnerRadius + 5, OuterRadius - 5, WidthPolar, HeightPolar, Width, Height, 'nearest_neighbor')
dev_set_window_extents (-1, -1, Width / 2, Height / 2)
dev_display (Image)
dev_display (CodeRegionCircular)
disp_message (WindowHandle, DecodedDataStrings, 'window', 12, 12, 'black', 'true')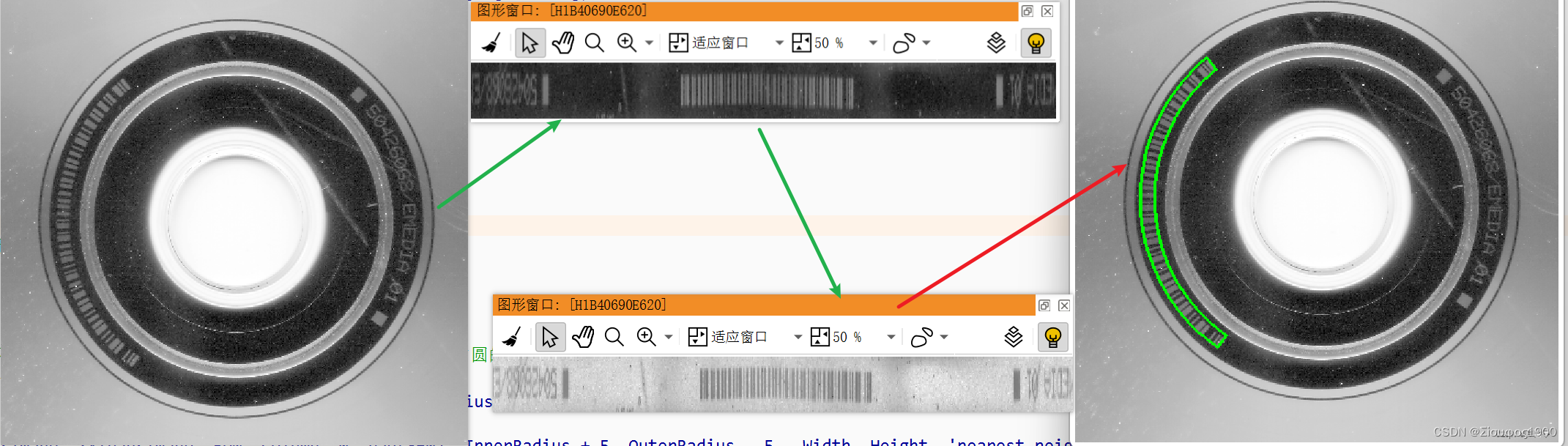 案例三
案例三
*
* tuning parameters
SmoothX := 501
ThresholdOffset := 25
MinDefectSize := 50
*
* initialization
PolarResolution := 640
RingSize := 70
get_system ('store_empty_region', StoreEmptyRegion)
set_system ('store_empty_region', 'false')
read_image (Image, 'bottles/bottle_mouth_01')
dev_update_off ()
dev_close_window ()
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, 640, 512, WindowHandle1)
set_display_font (WindowHandle1, 16, 'mono', 'true', 'false')
dev_display (Image)
dev_set_draw ('margin')
dev_set_line_width (3)
dev_open_window_fit_size (0, 648, RingSize, PolarResolution, 150, 512, WindowHandle)
dev_set_draw ('margin')
dev_set_line_width (3)
dev_set_color ('red')
*
* Main loop
*
* Detect defects in bottle necks
for Index := 1 to 16 by 1read_image (Image, 'bottles/bottle_mouth_' + Index$'.02')* * Part 1: 使用blob 分析将外部圆找出来auto_threshold (Image, Regions, 2)select_obj (Regions, DarkRegion, 1)opening_circle (DarkRegion, RegionOpening, 3.5)closing_circle (RegionOpening, RegionClosing, 25.5)fill_up (RegionClosing, RegionFillUp)boundary (RegionFillUp, RegionBorder, 'outer')dilation_circle (RegionBorder, RegionDilation, 3.5)reduce_domain (Image, RegionDilation, ImageReduced)* * 使用边缘亚像素来找轮廓 并拟合圆edges_sub_pix (ImageReduced, Edges, 'canny', 0.5, 20, 40)segment_contours_xld (Edges, ContoursSplit, 'lines_circles', 5, 4, 2)union_cocircular_contours_xld (ContoursSplit, UnionContours, 0.9, 0.5, 0.5, 200, 50, 50, 'true', 1)length_xld (UnionContours, Length)select_obj (UnionContours, LongestContour, sort_index(Length)[|Length| - 1] + 1)fit_circle_contour_xld (LongestContour, 'ahuber', -1, 0, 0, 3, 2, Row, Column, Radius, StartPhi, EndPhi, PointOrder)* * Part 2: 极坐标转换gen_circle (Circle, Row, Column, Radius)dilation_circle (Circle, RegionDilation, 5)erosion_circle (Circle, RegionErosion, RingSize - 5)difference (RegionDilation, RegionErosion, RegionDifference)reduce_domain (Image, RegionDifference, ImageReduced)polar_trans_image_ext (ImageReduced, ImagePolar, Row, Column, 0, rad(360), Radius - RingSize, Radius, PolarResolution, RingSize, 'nearest_neighbor')* * Part 3:检测是否有缺陷scale_image_max (ImagePolar, ImageScaleMax)mean_image (ImageScaleMax, ImageMean, SmoothX, 3)*原图区域-均值后的区域 =有差异的区域dyn_threshold (ImageScaleMax, ImageMean, Regions1, 55, 'not_equal')connection (Regions1, Connection)select_shape (Connection, SelectedRegions, 'height', 'and', 9, 99999)* ignore noise regionsclosing_rectangle1 (SelectedRegions, RegionClosing1, 10, 20)union1 (RegionClosing1, RegionUnion)* re-transform defect regions for visualizationpolar_trans_region_inv (RegionUnion, XYTransRegion, Row, Column, 0, rad(360), Radius - RingSize, Radius, PolarResolution, RingSize, 1280, 1024, 'nearest_neighbor')* * Part 4: Display results* display original image with resultsdev_set_window (WindowHandle1)dev_display (Image)dev_set_color ('blue')dev_display (RegionDifference)dev_set_color ('red')dev_display (XYTransRegion)* display polar transformed inspected region with results* The image and resulting region are rotated by 90 degrees* only for visualization purposes! (I.e. to fit better on the screen)* The rotation is NOT necessary for the detection algorithm.dev_set_window (WindowHandle)*旋转图像rotate_image (ImagePolar, ImageRotate, 90, 'constant')dev_display (ImageRotate)count_obj (RegionUnion, Number)if (Number > 0)mirror_region (RegionUnion, RegionMirror, 'diagonal', PolarResolution)mirror_region (RegionMirror, RegionMirror, 'row', PolarResolution)dev_display (RegionMirror)disp_message (WindowHandle1, 'Not OK', 'window', 12, 12, 'red', 'false')elsedisp_message (WindowHandle1, 'OK', 'window', 12, 12, 'forest green', 'false')endifif (Index < 16)disp_continue_message (WindowHandle1, 'black', 'true')stop ()endif
endfor
* Reset system parameters
set_system ('store_empty_region', StoreEmptyRegion)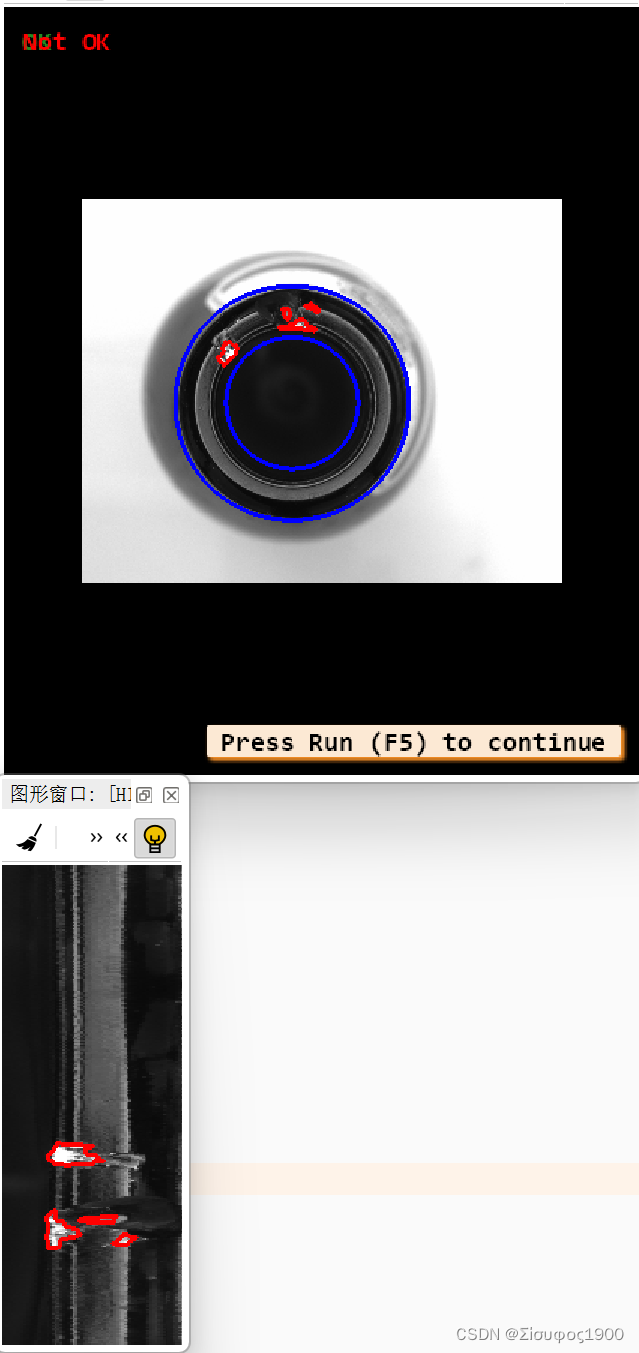
案例四
https://blog.csdn.net/cashmood/article/details/104709546
ead_image (Image, '1.png')
rgb3_to_gray (Image, Image, Image, ImageGray)
dev_open_window_fit_image (ImageGray, 0, 0, -1, -1, WindowHandle)
dev_set_draw ('margin')
dev_set_line_width (3)
dev_set_draw ('margin')
* dev_set_draw ('fill')
get_image_size (ImageGray, Width, Height)
binary_threshold (ImageGray, Region, 'max_separability', 'dark', UsedThreshold)
connection (Region, ConnectedRegions)
select_shape_std (ConnectedRegions, SelectedRegions, 'max_area', 70) * 计算最外测圆的直径
smallest_circle (SelectedRegions, Row2, Column2, Radius)
gen_circle (Circle, Row2, Column2, Radius)
reduce_domain (ImageGray, Circle, ImageReduced2)
gray_closing_rect (ImageReduced2, ImageClosing1, 10, 4)
*极坐标转换
polar_trans_image_ext (ImageClosing1, PolarTransImage1, Row2, Column2, 0, 6.28319, Radius-100, Radius-10, 6.28*Radius, 90, 'nearest_neighbor') mean_image (PolarTransImage1, ImageMean1, 500, 2)
dyn_threshold (PolarTransImage1, ImageMean1, RegionDynThresh1, 7, 'dark')
connection (RegionDynThresh1, ConnectedRegions1)
select_shape (ConnectedRegions1, SelectedRegions1, 'area', 'and',100, 9000000)
union1 (SelectedRegions1, RegionUnion)
closing_rectangle1 (RegionUnion, RegionClosing1, 10, 20)
connection (RegionClosing1, ConnectedRegions3) opening_rectangle1 (ConnectedRegions3, RegionOpening1, 10, 20) * 将区域还原到原图上
polar_trans_region_inv (RegionOpening1, XYTransRegion1, Row2, Column2, 0, 6.28319, Radius-100, Radius-10, 6.28*Radius, 90, Width, Height, 'nearest_neighbor')
smallest_circle (XYTransRegion1, Row, Column, Radius1)
gen_circle (Circle1, Row, Column, Radius1)
dev_display (ImageGray)
dev_display (Circle1)
五、Opencv :
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;int main() {Mat img = imread("rainbow.png");if (!img.data) {cout << "请检查图像文件名称是否正确" << endl;return -1;}Mat img1, img2;Point center = Point(img.cols / 2, img.rows / 2); //极坐标在图像中的原点//正极坐标变换->方变圆warpPolar(img, img1, Size(512, 512), center, center.x, WARP_POLAR_LINEAR);//逆极坐标变换->圆变方warpPolar(img1,img2,Size(img.rows,img.cols),center,center.x,WARP_INVERSE_MAP);imshow("Original", img);imshow("Anti Polar Result", img2);imshow("Polar Result", img1);waitKey(0);return 0;
}图像极坐标变换与反变换(Halcon + OpenCV)_将 环形虹膜图像的极坐标转换成矩形图像-CSDN博客
//
// Created by zzl on 2020/12/20.
//#include <iostream>
#include "opencv2/opencv.hpp"using namespace std;
using namespace cv;// 矩形图像转圆形
Mat Rectangle_to_Circle(const Mat &src, int Width);Mat Circle_to_Rectangle(const Mat &src);uchar getPixel(const Mat &src, double X, int X_up, int X_down, double Y, int Y_up, int Y_down);int main(int argc, char **argv) {// 读入图像Mat src, dst;src = imread("/home/zzl/Blog/CoordinateTrans/Data/testimage4.jpg", 0);namedWindow("InputImages", WINDOW_NORMAL);imshow("InputImages", src);dst = Rectangle_to_Circle(src, 2 * src.rows);namedWindow("OutputImages", WINDOW_NORMAL);imshow("OutputImages", dst);Mat dst2;dst2 = Circle_to_Rectangle(dst);namedWindow("OutputImages2", WINDOW_FREERATIO);imshow("OutputImages2", dst2);cout << "Hello World" << endl;waitKey();return 0;
}Mat Rectangle_to_Circle(const Mat &src, int Width) {int src_height = src.rows;int src_width = src.cols;Size dstSize = Size(2 * src_height, 2 * src_height);Mat dst = Mat::zeros(dstSize, CV_8UC1);// 极坐标变换double scale_r = 2 * src_height / (dstSize.width);double scale_theta = src_width / CV_2PI;Mat tmp = Mat::zeros(dst.size(), CV_64FC1);for (int i = 0; i < dstSize.height; ++i) {for (int j = 0; j < dstSize.width; ++j) {// 计算距离Point2d center(dstSize.width / 2, dstSize.width / 2);double distance = sqrt(pow(i - center.y, 2) + pow(j - center.x, 2));
// tmp.at<double>(j, i) = distance;if (distance < dstSize.width / 2) {// 处于边界内部的点,可以提取像素// 坐标变换求对应方图上的点的坐标double Rec_Y = distance * scale_r; //Y 方向坐标if (Rec_Y < 0) {Rec_Y = 0;}if (Rec_Y > dstSize.width / 2) {Rec_Y = dstSize.width / 2;}double line_theta = atan2(i - center.y, j - center.x);if (line_theta < 0) {line_theta += CV_2PI;}if (line_theta < 0) {cout << "仍然小于0" << endl;}double Rec_X = line_theta * scale_theta;dst.at<uchar>(i, j) = src.at<uchar>((int) Rec_Y, (int) Rec_X);}}}// ---- 显示图像边界距离
// normalize(tmp, tmp, 0, 1, NORM_MINMAX);
// Mat display;
// tmp.convertTo(display, CV_8UC1, 255.0);
//
// namedWindow("Distance", WINDOW_NORMAL);
// imshow("Distance", display);
// waitKey();
// circle(display, Point2d(Width / 2, Width / 2), Width / 2, 0, 10, LINE_8);
// imshow("Distance", display);
// waitKey();return dst;
}Mat Circle_to_Rectangle(const Mat &src) {// 变换不同的图像大小有不同的效果Mat dst = Mat::zeros(Size((int) (src.cols * CV_PI) + 1, src.cols / 2 + 1), CV_8UC1);
// Mat dst = Mat::zeros(Size(src.cols / 2 + 1, src.cols / 2 + 1), CV_8UC1);double scale_r = src.cols / (dst.rows);double scale_theta = 2 * CV_PI / dst.cols;for (int i = 0; i < dst.cols; ++i) {double theta = i * scale_theta;double sinTheta = sin(theta);double cosTheta = cos(theta);for (int j = 0; j < dst.rows; ++j) {double p = j * scale_r;double X = (src.rows / 2 + cosTheta * p);double Y = (src.cols / 2 + sinTheta * p);int X_up = ceil(X);int X_down = floor(X);int Y_up = ceil(Y);int Y_down = floor(Y);if (X > src.cols) {X = src.cols;}if (X < 0) {X = 0;}if (Y > src.rows) {Y = src.rows;}if (Y < 0) {Y = 0;}// 若使用插值算法需要取消注释
// uchar tmp_Pixel = getPixel(src, X, X_up, X_down, Y, Y_up, Y_down);
// dst.at<uchar>(j, i) = tmp_Pixel;dst.at<uchar>(j, i) = src.at<uchar>(Y, X); // 最近邻算法}}return dst;
}uchar getPixel(const Mat &src, double X, int X_up, int X_down, double Y, int Y_up, int Y_down) {// 插值算法// X 为水平方向坐标 X_up、X_down分别为向上向下取整后的值 Y同理double inter_val = 0;if (X_up == X_down && Y_up == Y_down) {inter_val = saturate_cast<uchar>(src.at<uchar>(Y_up, X_up));} else if (X_up == X_down) {inter_val = saturate_cast<uchar>((Y_up - Y) * src.at<uchar>(Y_up, X_up) +(Y - Y_down) * src.at<uchar>(Y_down, X_up));} else if (Y_up == Y_down) {inter_val = saturate_cast<uchar>((X_up - X) * src.at<uchar>(Y_up, X_up) +(X - X_down) * src.at<uchar>(Y_up, X_down));} else {double Y_tmp = saturate_cast<uchar>((X_up - X) * src.at<uchar>(Y_down, X_up) +(X - X_down) * src.at<uchar>(Y_down, X_down));double X_tmp = saturate_cast<uchar>((X_up - X) * src.at<uchar>(Y_up, X_up) +(X - X_down) * src.at<uchar>(Y_up, X_down));inter_val = (Y_up - Y) * X_tmp + (Y - Y_down) * Y_tmp;}return (uchar) inter_val;
}
这篇关于Halcon 极坐标转换图像的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







