ahrs专题

海康相机+SC-AHRS-100D2 IMU + VINS-MOMO
百度找IMU适配型号的功能包sanchi_amov。注意imu的坐标系。 解压功能包,编译,用sanchi_amov启动SC-AHRS-100D2(根据不同型号改参数) roslaunch sanchi_amov imu_100D2.launch 若端口打开错误,配置其权限 sudo chmod 777 /dev/ttyUSB0 IMU话题为 /imu/data_raw 将海

其他-IMU与AHRS区别
AHRS: Attitude and Heading Reference System 中文译称“航姿参考系统”,包含陀螺仪,加速度计,电子罗盘。通过地球的重力场,磁场来判读自身的姿态与位置,磁场重力场越正交,精度效果越好,因而在高纬度地区误差大。 IMU: Inertial Measurement Unit 中文译称“惯性测量单元”,包含陀螺仪,加速度计。IMU将所有运动视作直线运动与旋转运动
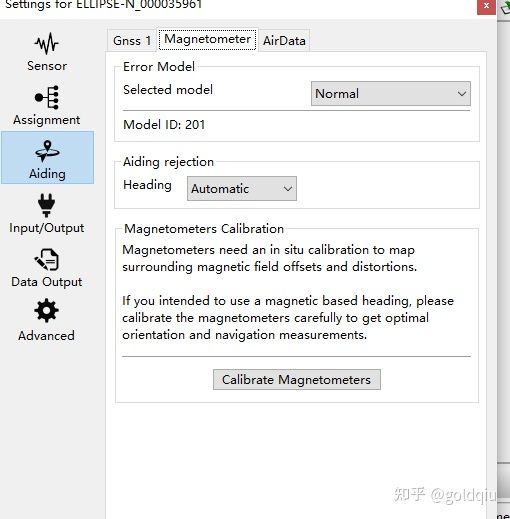
一.开发记录之AHRS、惯导传感器SBG-Ellipse-N传感器配置和使用
一、 磁力计校准 Window上位机连接上模块 在室外点击Calibrate Magnetometers,然后按手册进行校准,让传感器尽可能在多的不同方向旋转。校准结束,按下“Calibrate”按钮,点击OK,上位机会有参数值示意,达到1左右就可以了。 二、 惯导ROS驱动yaml文件修改 惯导ROS驱动包yaml文件可以修改传感器参数,但是不建议。建议的做法是在上位机进行修改,修改

ArduPilot开源飞控之AP_AHRS
ArduPilot开源飞控之AP_AHRS 1. 源由2. 框架设计2.1 启动代码2.2 任务代码 3. 重要例程3.1 init3.2 update 4. 外部AHRS传感模块4.1 init4.2 update 5. 参考资料 1. 源由 AHRS(Attitude Heading Reference System): 飞控最为重要的一个任务就是姿态、位置、方向计算。 本