act专题

【Java设计模式】Arrange/Act/Assert模式:增强测试的清晰度和简洁性
文章目录 【Java设计模式】Arrange/Act/Assert模式:增强测试的清晰度和简洁性一、概述二、Arrange/Act/Assert设计模式的别名三、Arrange/Act/Assert设计模式的意图四、Arrange/Act/Assert模式的详细解释及实际示例五、Java中Arrange/Act/Assert模式的编程示例六、Java中何时使用Arrange/Act/Asse

ORA-1688: unable to extend table ACT.INFO_HIS partition P_201807 by 64 in tablespace TA
问题描述: 表空间TA的已扩展空间还有剩余255GB,而数据文件最大可扩展空间已到最大值。current_tatal=max_total,数据文件已经无法扩展。 据库报ORA-1688错误的问题分析如下: Mon Aug 13 09:35:47 2018 ORA-1688: unable to extend table ACT.INFO_HIS partition P_201807

poj1655 Balancing Act 【树形DP(很弱)】
都不知道怎么分类了。 大概要求一个树中以某个结点为根的子树结点个数,还有儿子结点中以儿子结点为根的子树结点个数的最大值,用递归得到n[i],以i为根节点的子树结点个数 #include <cstdio>#include <cstdlib>#include <iostream>#include <algorithm>#include <vector>#include <cstring>
java.lang.IllegalArgumentException:Service Intent must be explicit:Intent{act=org.opencv.engine.BIND
这是由于Android到了5.0版本也就是api>=21以后的一些新特性造成的。这时只需要改一下你的opencv library工程的org.opencv.android.AsyncServiceHelper的initOpenCV方法为如下: public static boolean initOpenCV(String Version, final Context AppContext,f

JAVA ACT ANGELS DEMONS DEMO
这是本人首个ACT游戏:"ANGELS & DEMONS“,游戏类似超级玛丽。因为计划在国外发布,所以做成了英文版。 类似超级玛丽,只是一个范例而已,所以只有1关。 下载地址: (含jdk) http://115.com/file/bhfnv06i# (不含jdk)10MB http://115.com/file/bhfnoyl7# 如果不了解JA

Camunda7.18流程引擎启动出现Table ‘camunda_platform_docker.ACT_GE_PROPERTY‘的解决方案
文章目录 1、问题描述2、原因分析3、解决方案3.1、方案一:降低mysql版本3.2、方案二:增加nullCatalogMeansCurrent参数(推荐) 4、总结 1、问题描述 需要在docker中,部署Camunda流程引擎。通过启动脚本camunda-platform-dockerstart.sh 连接引擎。 本文使用的数据库为mysql8.0.21版本,camun
Linux(ACT)权限管理
文章目录 一、 ATC简介二、 案例1. 添加测试目录、用户、组,并将用户添加到组2. 修改目录的所有者和所属组3. 设定权限4. 为临时用户分配权限5. 验证acl权限 6. 控制组的acl权限 一、 ATC简介 ACL(Access Control List,访问控制列表)是一种文件权限管理机制,它提供了比传统的UGO(用户、组、其他)权限更灵活的权限设置方式。以下是ACL的
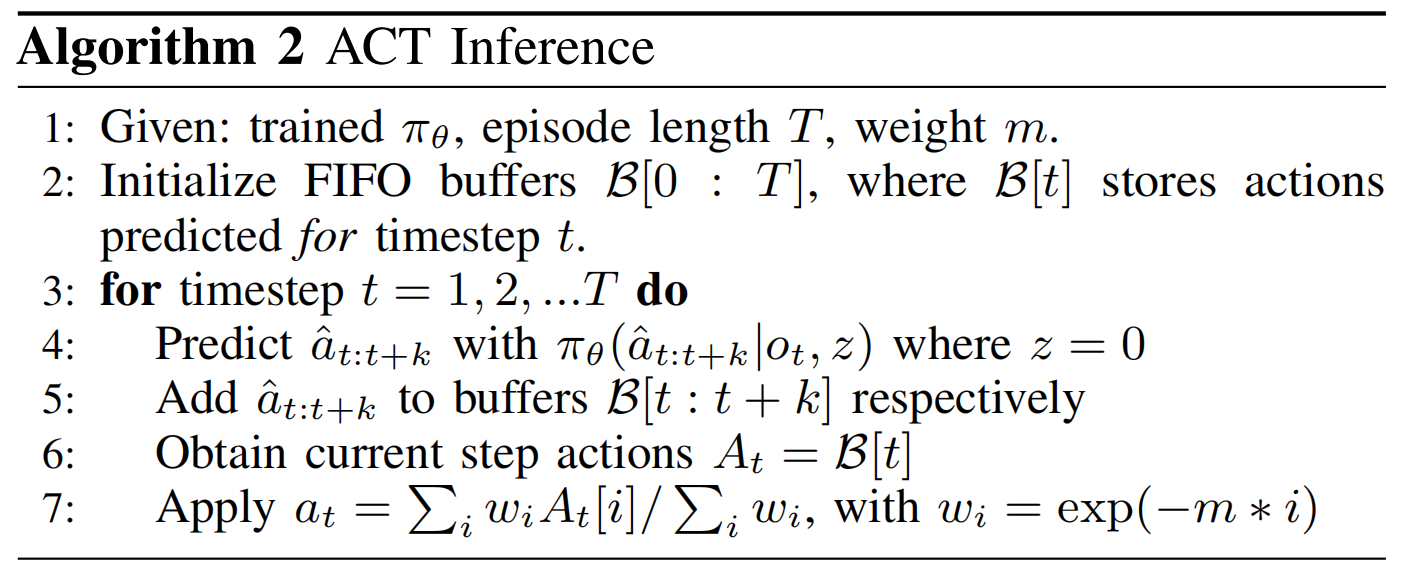
斯坦福Mobile ALOHA背后的关键技术:动作分块算法ACT的原理解析
前言 23年已过35 今24年则将36,到40岁之前还有4年半,这4年半我想冲一把大模型机器人(兼具商业价值、社会价值、科技价值 ),因为 通过过去一年的研究探索与应用开发(比如我带队开发完成的AIGC模特生成、论文审稿GPT、企业知识库问答等),机器人是在可能范围之内我能做的最大的项目(至于更大的如造车 我也干不了),很难,4年半下来也不一定能达到预期,但全力希望通过Q1之内的技术准备、复现
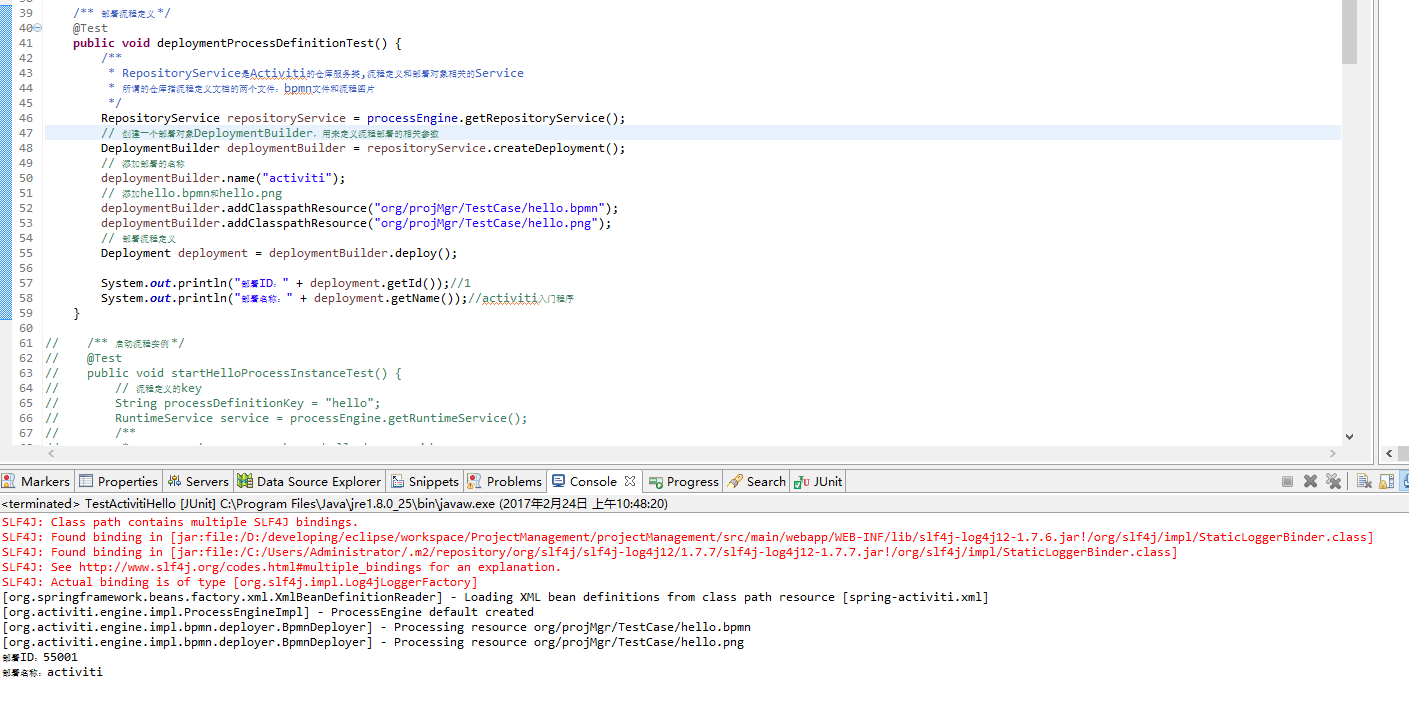
activiti部署流程定义时出错:INSERT INTO ACT_GE_BYTEARRAY,修改数据库编码
activiti部署流程定义时出错 1 // 部署流程定义 Deployment deployment = deploymentBuilder.deploy(); 错误信息:(有乱码的...没留下截图...) 1 SLF4J: Class path contains multiple SLF4J bindings. 2 SLF4J: Found binding in [jar:fil

org.postgresql.util.PSQLException: 错误: 关系 act_ge_property 不存在
先说解决方式: 删除act_*相关的表,然后手动重建表。act_ge_property表中有4行数据也要手动插入。 插入sql语句在activiti-engine-6.0.0.jar中有。 activiti-engine-6.0.0.jar!\org\activiti\db\create\activiti.postgres.create.engine.sql activiti.post

Aloha 机械臂的学习记录4——act:detr_vae.py的代码部分
detr_vae.py的原始代码如下: # Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved"""DETR model and criterion classes."""import torchfrom torch import nnfrom torch.autograd import Varia
斯坦福Mobile ALOHA提到的ACT之外的另两项技术:Diffusion Policy、VINN
前言 本文接上一篇文章《斯坦福机器人Mobile ALOHA的关键技术:动作分块ACT的算法原理与代码剖析》而来,当然最开始本文是作为上一篇文章的第二、第三部分的 但因为ACT太过关键,除了在上一篇文章中写清楚其算法原理之外,还得再剖析其代码实现,故为避免上一篇文章太过长,也为更清楚的阐述Diffusion Policy、VINN,故便有了本文 第一部分 Diffusion Policy
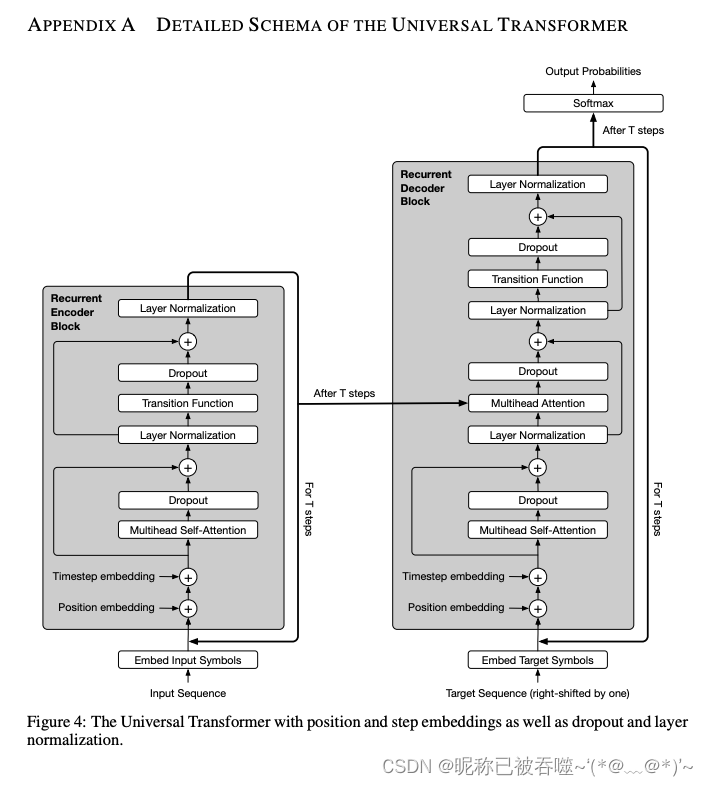
UniversalTransformer with Adaptive Computation Time(ACT)
原论文链接:https://arxiv.org/abs/1807.03819 Main code import torchimport numpy as npclass PositionTimestepEmbedding(torch.nn.Module):def forward(self, x, t):device = x.devicesequence_length = x.si
ACT、NAT、NATPT和EASY-IP
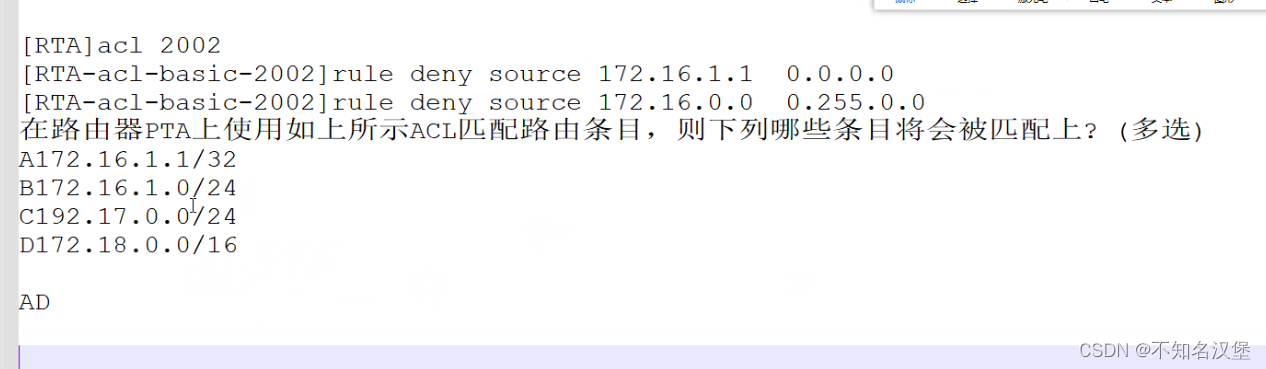
目录 一、ACL 1.ACL 2.ACL的两种应用匹配机制 3.ACL的基本类型 4.ACL命令操作 5.ACL实验: 4.ACL的应用原则: 5.匹配原则: 二、NAT 1.NAT的原理及作用: 2.NAT分类 3.NAT配置 三、EASY-ip实验 四、NATPT 五、通配符 一、ACL 1.ACL ACL:是访问控制列表。 作用:过滤流量,然后匹
ACT、NAT、NATPT和EASY-IP
目录 一、ACL 1.ACL 2.ACL的两种应用匹配机制 3.ACL的基本类型 4.ACL命令操作 5.ACL实验: 4.ACL的应用原则: 5.匹配原则: 二、NAT 1.NAT的原理及作用: 2.NAT分类 3.NAT配置 三、EASY-ip实验 四、NATPT 五、通配符 一、ACL 1.ACL ACL:是访问控制列表。 作用:过滤流量,然后匹
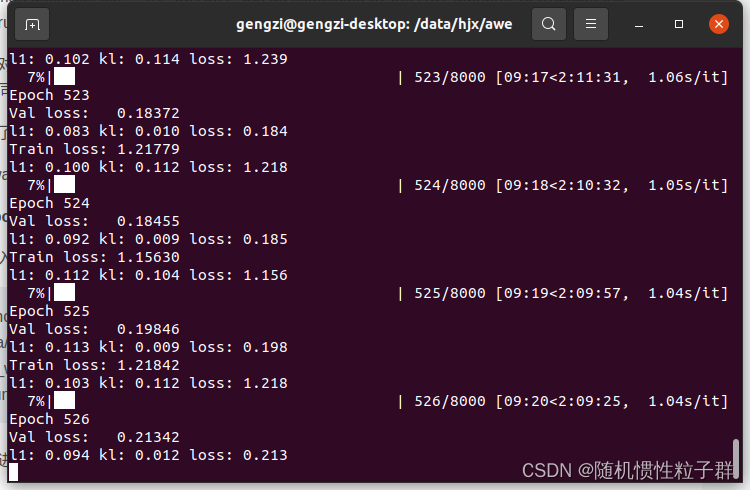
Aloha 机械臂的学习记录2——AWE:AWE + ACT
继续下一个阶段: Train policy python act/imitate_episodes.py \ --task_name [TASK] \ --ckpt_dir data/outputs/act_ckpt/[TASK]_waypoint \ --policy_class ACT --kl_weight 10 --chunk_size 50 --hidden_dim 512 --b
poj 1655 Balancing Act(树形dp)
本文出自 http://blog.csdn.net/shuangde800 -------------------------------------------------------------------------------------- 题目链接: poj-1655 题意 一n个节点的棵树,去掉某个节点后,会变成一个

LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比
本心、输入输出、结果 文章目录 LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比前言RAG、MRKL、Re-Act和Plan-Execute模式的一些对比花有重开日,人无再少年实践是检验真理的唯一标准 LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比 编辑:简简单单 Online zuozuo
LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比
本心、输入输出、结果 文章目录 LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比前言RAG、MRKL、Re-Act和Plan-Execute模式的一些对比花有重开日,人无再少年实践是检验真理的唯一标准 LLM 开发模式 RAG,MRKL,Re-Act,Plan-Execute 模式对比 编辑:简简单单 Online zuozuo

flowable项目报错:java.sql.SQLSyntaxErrorException: Table ‘psr_flowable_test.act_ge_property’ doesn’t exi
报错 java.sql.SQLSyntaxErrorException: Table ‘psr_flowable_test.act_ge_property’ doesn’t exist 解决 比如在代码中配置: configuration.setJdbcUrl("jdbc:mysql://localhost:3306/flowable_test?nullCatalogMeansC
poj 1655 Balancing Act(树形DP,删点)
1、http://poj.org/problem?id=1655 2、题目大意: 一棵树有n个点,每个点都有一个平衡值,就是该点的子树中结点数最大值,现在要删除这样一个点,他的平衡值最小,本题只有一种方式,不用考虑是否有重复值,只需要输出最小的那个点及他的平衡值即可 dp[i]表示i点的平衡值 dp[i]=max(max(cnt[v]),n-cnt[u]) 3、AC代码: #inclu
android项目调试问题(ActivityManager: Starting: Intent { act=android.intent.action.MAIN cat=[android.inten)
问题:ActivityManager: Starting: Intent { act=android.intent.action.MAIN cat=[android.intent.category.LAUNCHER] cmp=com.example.gnss_rtk/.MainActivity },运行开始即退出 解决:将依赖的项目appcompat包更新到最新。

Balancing Act (树形dp 求树的重心板题)
题目:Balancing Act Consider a tree T with N (1 <= N <= 20,000) nodes numbered 1...N. Deleting any node from the tree yields a forest: a collection of one or more trees. Define the balance of a node to
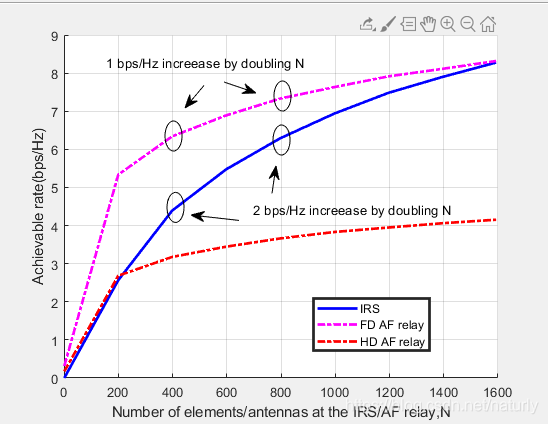
matlab 画图---添加注释如何确定注释位置及大小(Intelligent Reflecting Surface Enhanced Wireless Network via Joint Act)
复现文章:Intelligent Reflecting Surface Enhanced Wireless Network via Joint Active and Passive Beamforming 绘制文章Fig.5 如下,存在偏差(找不出原因,应该是参数的问题)(左原图 右复现图) 1 创建注释函数:annotation() 函数详细介绍:https://ww2.mat
how to act as a good scrum master
last sprint advantages: 32.1, save meeting time.because need to save engineers developing time. 32.2,重视dependencies, 主动push工程师进行dependency的沟通和解决。 improve: 32.3, 细分task, make sure every task can be fin
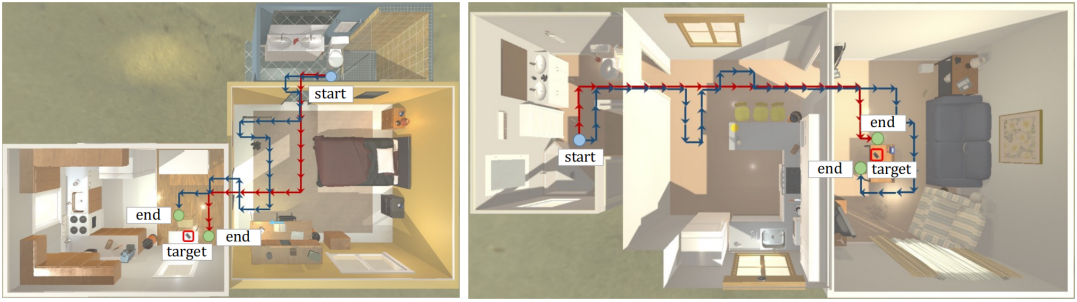
Look, Listen, and Act: Towards Audio-Visual Embodied Navigation(2020)
看、听和行动:面向视听体现的导航(2020) 摘要 移动智能代理的一个关键能力是在一个环境中整合来自多个感官输入的证据,并做出一系列动作来实现其目标。 在本文中,我们试图探讨视听嵌入式导航问题,即在仅给定原始的以自我为中心的视觉和听觉感官数据的情况下,规划从场景中随机起始位置到室内环境中声源的最短路径的任务。 为了完成这项任务,代理需要学习各种模式,即将音频信号与视觉环境相关联。 在这