随机噪声专题

Open3D 点云添加均匀分布的随机噪声
目录 一、概述 1.1实现步骤 1.2应用场景 二、代码实现 三、实现效果 3.1原始点云 3.2添加噪声后点云 Open3D点云算法汇总及实战案例汇总的目录地址: Open3D点云算法与点云深度学习案例汇总(长期更新)-CSDN博客 一、概述 在 Open3D 中,可以通过向点云的每个点添加随机噪声来模拟实际的测量误差或环境噪声。均匀分布的随机噪声是
《基于ICEEMDAN 和分布熵的SS-Y伸缩仪信号随机噪声压制方法》论文笔记
吴林斌.基于ICEEMDAN 和分布熵的SS-Y 伸缩仪信号随机噪声压制方法[J/OL].大地测量与地球动力学. https://doi.org/10.14075/j.jgg.2023.07.103 CEEMDAN和ICEEMDAN性质差不多,只是改良了一下 这篇文章相较于上级篇文章,没有用方差和相关系数来评估IMF的噪声含量,而是提出用分布熵这个词来评估的, 分布熵,它通常用来描述一个随机变
156基于Matlab的光纤陀螺随机噪声和信号
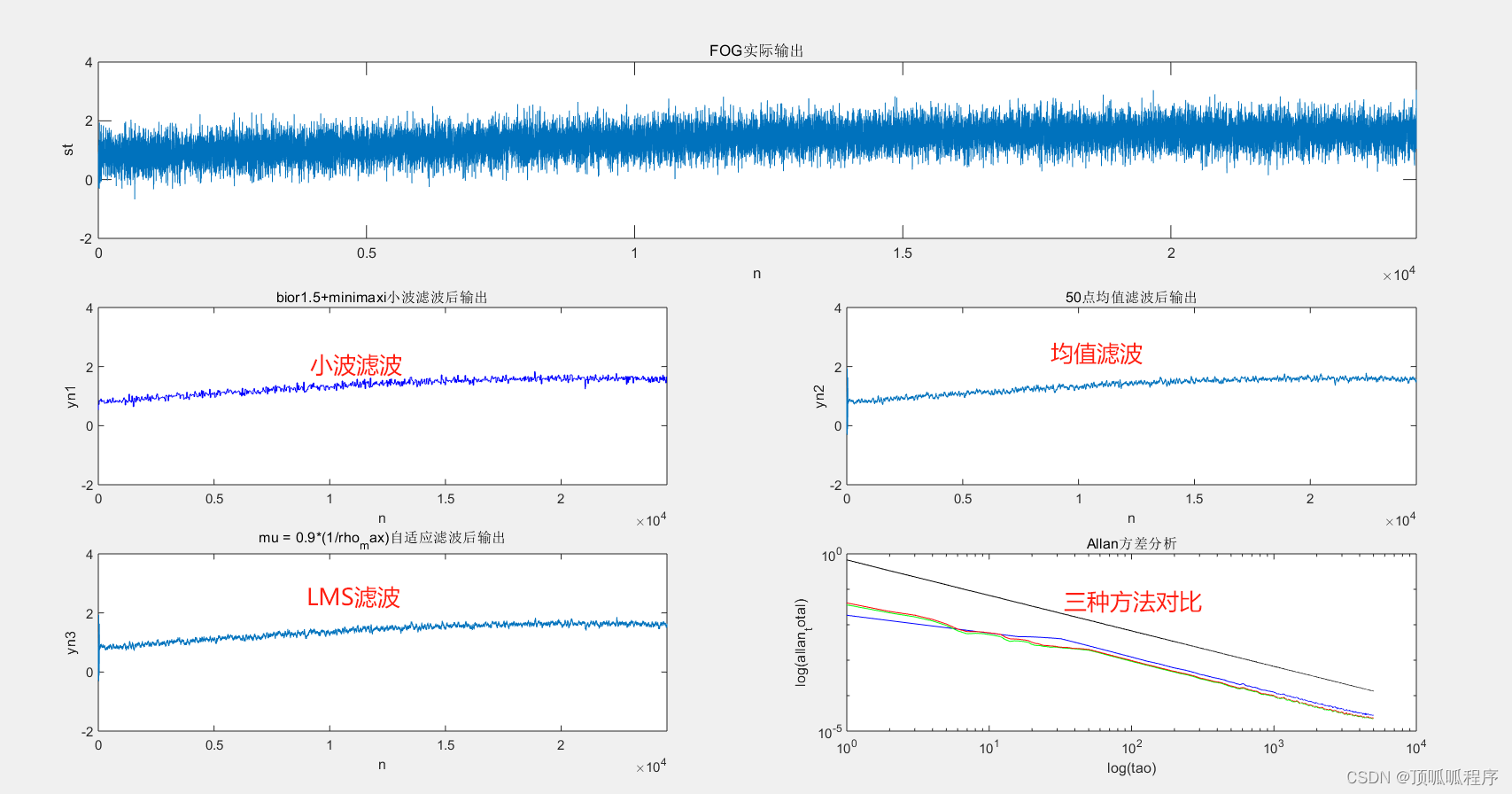
基于Matlab的光纤陀螺随机噪声和信号,利用固定步长和可调步长的LMS自适应滤波、最小二乘法、滑动均值三种方法进行降噪处理,最后用阿兰方差评价降噪效果。程序已调通,可直接运行。 156 信号处理 自适应滤波 降噪效果评估 (xiaohongshu.com)
关于随机数的设定和随机噪声
以下是设立随机数和随机噪声的code: 设定随机数的方法有很多,下面代码是通过numpy的API设定随机数,除了numpy,实际上scikit,tf,pytorch都有设定随机数的API的 # Set a random seed for reproducibility(01modifiy)加入随机数的代码最好是在第一行np.random.seed(200)# 数据集拆分X, y = np