能动专题
ROS 2边学边练(45)-- 构建一个能动的机器人模型
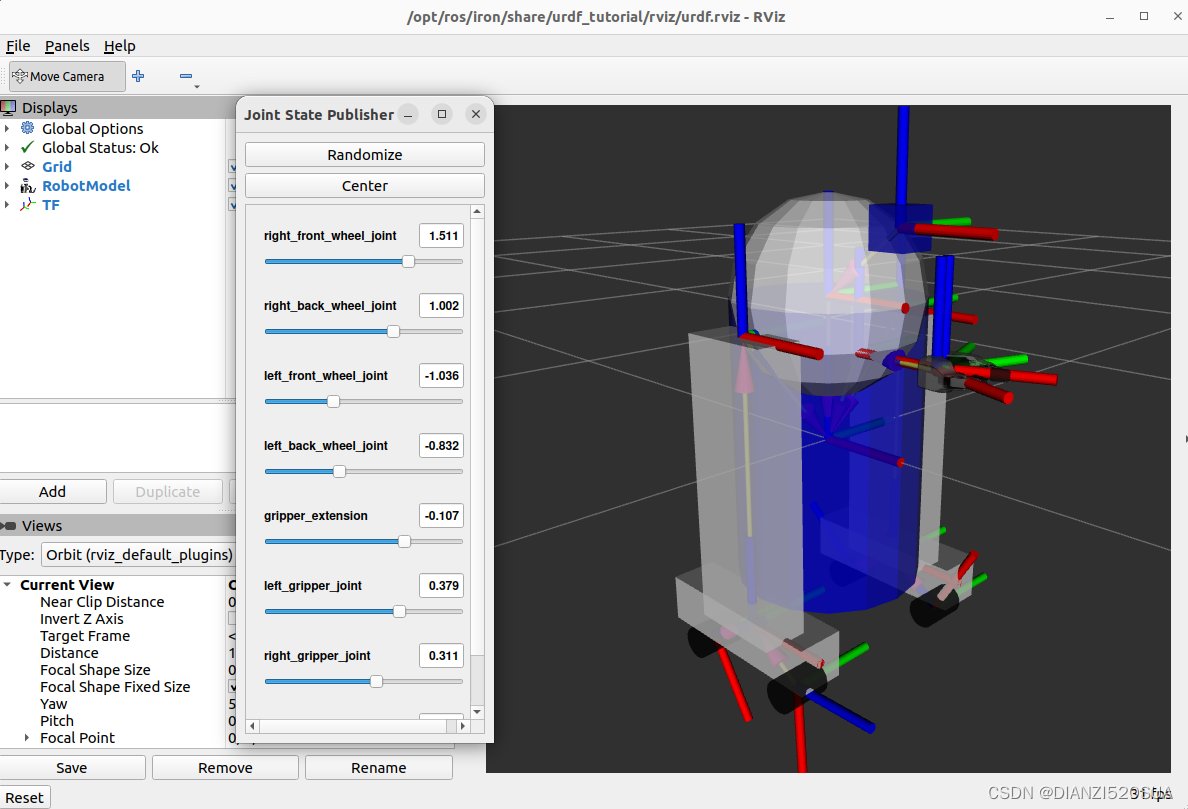
前言 在上篇中我们搭建了一个机器人模型(其由各个关节(joint)和连杆(link)组成),此篇我们会通过设置关节类型来实现机器人的活动。 在ROS中,关节一般有无限旋转(continuous),有限旋转(revolute)和滑动(prismatic)三种类型,除了上述三种关节类型外,ROS还支持其他类型的关节,如planar(平面关节,允许在平面正交方向上平移