示教专题
【EAI 007】Mobile ALOHA:一个低成本的收集人类示教数据的双臂移动操作硬件系统
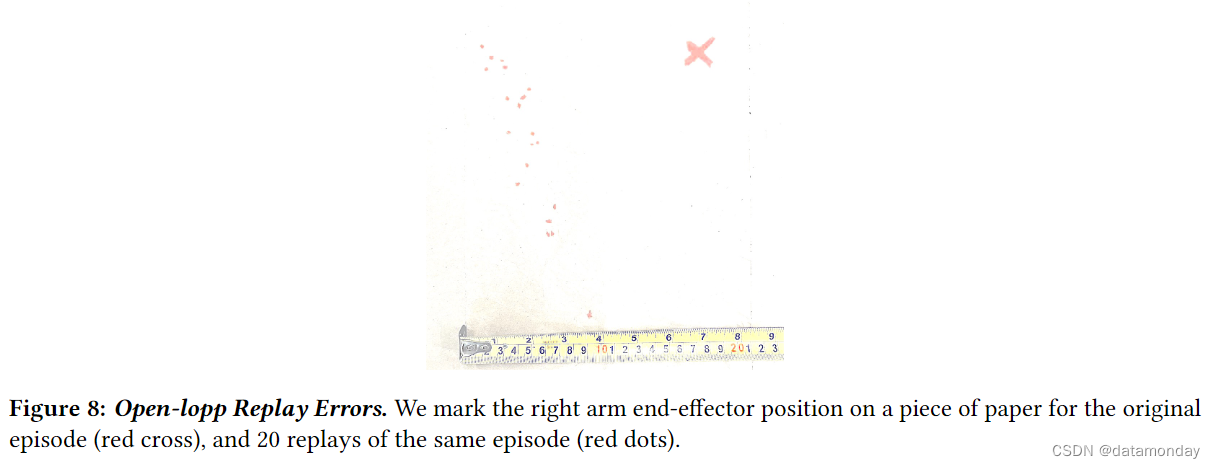
论文标题:Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation 论文作者:Zipeng Fu, Tony Z. Zhao, Chelsea Finn 作者单位:Stanford University, UC Berkeley, Meta 论文原文:https://arx

DrGraph原理示教 - OpenCV 4 功能 - 膨胀腐蚀
在二值图的结果基础上,可针对性处理。 这些处理有些是概念上的,有些是原理上的,也有形态上的,那就看用途与目的了。 本质上还是对二值图的黑白点进行处理,以用于图像增强、边缘检测、图像分割等多个领域。比如膨胀与腐蚀。 膨胀:输入图像与结构元素进行卷积计算,取局部极大值来替代中心值,可以使相互分离的物体连接起来。 腐蚀:取局部极小值替换中心值,可以断开两个连接在一起的物体。 这个概念对于没太多理论支持的
DrGraph原理示教 - OpenCV 4 功能 - 颜色变幻
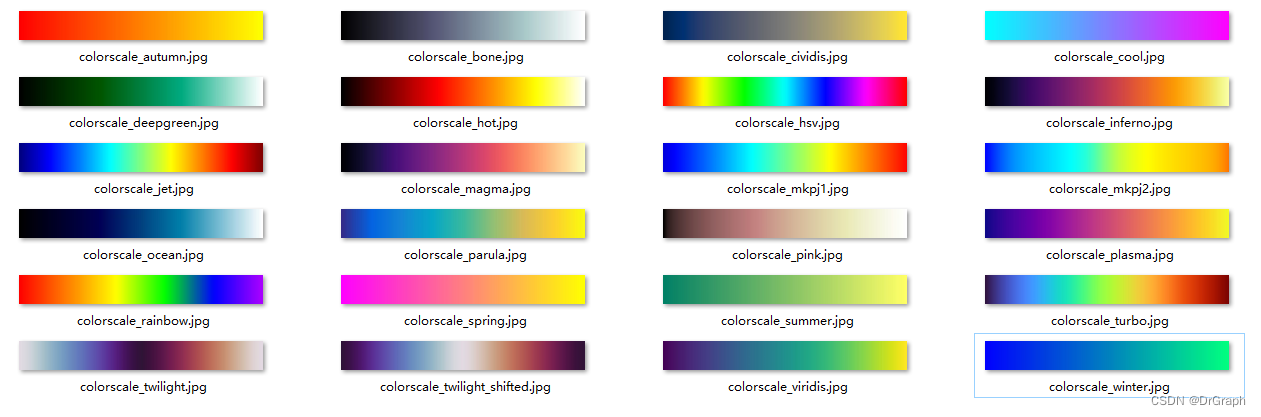
二值化是逐像素处理,而逐像素处理会有很多效果,这主要是给人眼看的,因为像素值的变化,直观的就是图像变化,比如颜色。 颜色变幻处理 OpenCV提供了一些图片,如下: 粗看是一些风格,细看一下,其实是各行颜色一致,看属性知道图像尺寸为256 * 30。 256是字节宽度,也是各通道取值范围。 所以,可以用查表法直接替代处理,即将上面一张图片作为输入,则各行就将原值的0-255映射成为图片相应列
开源六轴协作机械臂MechArm 拖动示教模型案例
介绍 今天,我将向大家展示一个我独立设计并实现的机械臂模型。这个模型的核心功能是实现实时的手势追踪——只需用手轻轻拖拽,机械臂就能立即跟随你的动作进行移动。 我之所以想要创造这样一个模型,是因为在一些危险环境中,我们可以用机械臂来代替人工进行作业,从而避免人员的生命安全受到威胁。 你可能会问,为什么不直接使用远程的键盘控制、手柄控制或者APP控制,而要选择手动拖拽的方式呢?我觉得只有手动操

法兰克机器人循环编程_FANUC机器人示教编程:距离先执行指令功能介绍与使用方法...
概述 距离先执行指令是这样一种功能,它在机器人的TCP相对动作指令的目标位置到达所指定的距离以内时,与机器人的动作并行地调用程序,或者进行信号输出。本指令可作为动作指令的附加指令来使用,不能作为单独指令进行示教。 J P[1] 100% FINE L P[2] 1000mm/sec FINE DB 100mm,CALL A 距离先执行指令功能相关要素、参数、使用限制说明如下表所示。 使用本指令前

机械臂的零力拖动和直接示教
机械臂的零力拖动(Zero Force Control)指的是在机械臂的关节没有输出扭矩的状态下,利用外力使其产生运动的一种方式。 其基本原理是:1. 先切断机械臂关节的控制器,使关节不能输出扭矩。 2. 然后人工对机械臂施加外力,带动其执行运动。 3. 这时由于关节输出扭矩为零,机械臂会随着外力移动,实现被动运动。 4. 通过测量关节位置,可以记录下这种被动运动轨迹。 5. 再将记录的

FANUC机器人示教编程:宏指令功能介绍与使用方法
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注! 概述 宏指令是指把由若干个程序指令组成的机器人程序作为一条单独的指令来记录,进而调用并执行该指令的功能。FANUC机器人支持记录150个宏指令,可以将现有的程序记录为宏指令,也可以单独创建宏程序,然后再将其记录为宏指令。 使用宏指令时可以按如下步骤进行: 1.创建一个程序作为宏程序,并对程序进行示

DMC640MH激光焊锡功率实时控制示教系统
CRT工业运动控制系统,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及直线曲线加减速控制、I/O 信号的检测处理。DMC600M系列3~6轴运动控制系统(DMC630M、DMC640M、DMC650M、DMC660M),运用实时多任务控制技术和硬件插补技术,稳定性高, 加工精度高,运行平稳,实现多种插补(直线、圆弧、抛物线及螺旋线插补等),并其他轴联动。