矢量积专题
机械臂雅可比矩阵的矢量积理解和matlab实现
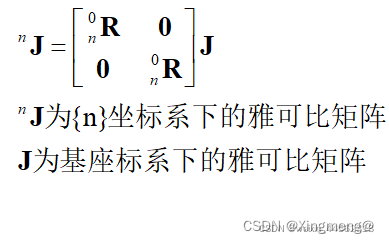
雅可比矩阵的第Ji列: 关于一些基本概念可以参考博客,部分细节如下: 每个移动关节,Ji可以这样计算: 每个旋转关节,Ji这样计算: 有时候要求按照末端执行器坐标系{n}来执行一些位移旋转之类的操作,在末端执行器坐标系下的雅可比矩阵可以这样计算: SDH代码程序参考博客,如下: function [ J ] = Jacob_cross_SDH( q )%JACOB_CROSS_S