环视专题

Java正则环视和反向引用
==环视== 1、环视概念 环视,又称为零宽断言,简称断言。 环视强调位置(前面或后面),必须匹配环视表达式,才能匹配成功。 环视可认为是虚拟加入到它所在位置的附加判断条件,并不消耗正则的匹配字符。 2、环视基础表达式 ( ?= Expression) 顺序肯定环视,表示所在位置 右侧能够匹配 Expression ( ?! Ex

高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据)
高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据) 附赠自动驾驶学习资料和量产经验:链接 写在前面 在自动驾驶车辆的使用寿命内,传感器外参校准会因振动、温度和碰撞等环境因素而发生变化。即使是看似无害的 camera-lidar 外参校准值有一两度的误差,也可能给高级的 camera-lidar 感知功能引入灾难性的故障。 连续在线外部校准(COEC)在自动驾驶

【目标跟踪】多相机环视跟踪
文章目录 一、前言二、流程图三、实现原理3.1、初始化3.2、输入3.3、初始航迹3.4、航迹预测3.5、航迹匹配3.6、输出结果 四、c++ 代码五、总结 一、前言 多相机目标跟踪主要是为了实现 360 度跟踪。单相机检测存在左右后的盲区视野。在智能驾驶领域,要想靠相机实现无人驾驶,相机必须 360 度无死角全覆盖。博主提供一种非深度学习方法,采用kalman滤波+匈牙利匹配方
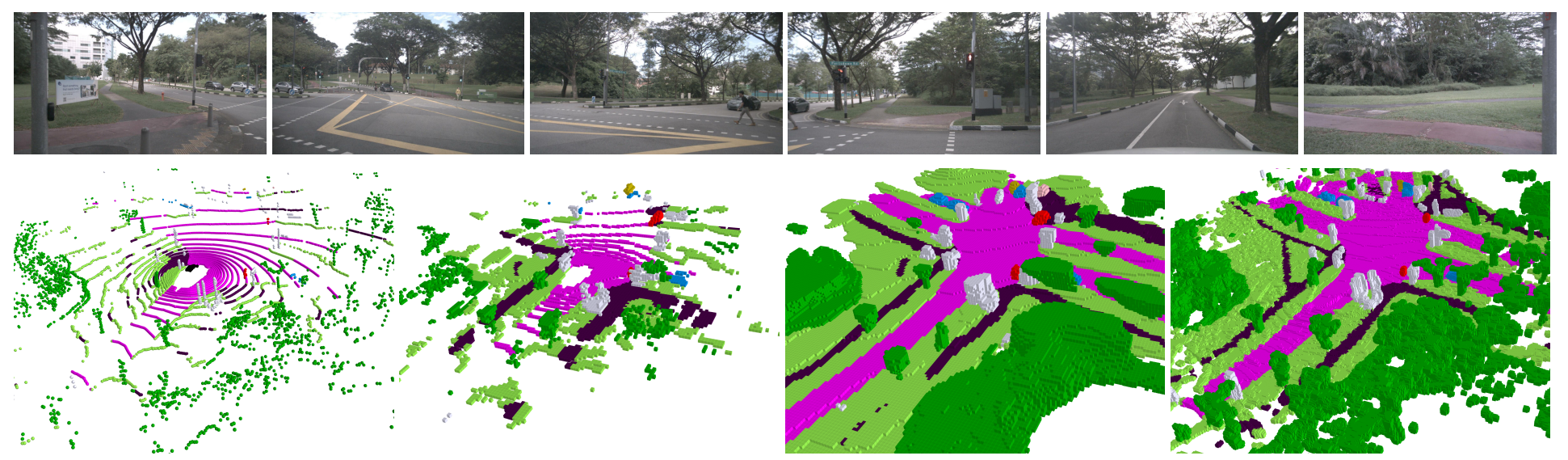
【占用网络】SurroundOcc:基于环视相机实现3D语义占用预测 ICCV 2023
前言 本文分享“占用网络”方案中,来自ICCV 2023的SurroundOcc,它基于环视相机实现3D语义占用预测。 使用空间交叉注意力将多相机图像信息提升到3D体素特征,即3D体素Query到2D图像中查询融合特征的思想。 然后使用3D卷积逐步对体素特征进行上采样,并在多个层次特征图上进行损失监督。 论文地址:SurroundOcc: Multi-Camera 3D Occupancy

四. 基于环视Camera的BEV感知算法-BEVDepth
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camera的BEV感知算法,一起去学习下 BEVDepth 感知算法 课程大纲可以看下面的思维导图 0. 简述

四. 基于环视Camera的BEV感知算法-BEVDet
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camera的BEV感知算法,一起去学习下 BEVDet 感知算法 课程大纲可以看下面的思维导图 0. 简述 本次
代客泊车的环视图鱼眼BEV感知的数据集、基线方法和克服畸变的多任务框架
点云PCL免费知识星球,点云论文速读。 文章:Surround-view Fisheye BEV-Perception for Valet Parking: Dataset, Baseline and Distortion insensitive Multi-task Framework 作者:Zizhang Wu1& Yuanzhu Gan1& Xianzhi Li2∗ Yunzhe Wu1

四. 基于环视Camera的BEV感知算法-BEVFormer
目标 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比5. BEVFormerv2总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camera的BEV感知算法,一起去学习下 BEVFormer 感知算法 课程大纲可以看下面的思维

四. 基于环视Camera的BEV感知算法-DETR3D
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camera的BEV感知算法,一起去学习下 DETR3D 感知算法 课程大纲可以看下面的思维导图 0. 简述 从

全景环视前装市场“变天”,这家中国本土供应商首次跻身份额第一
作为中国本土供应商最先进入的细分市场,全景环视系统近年来也在悄然发生市场格局的重构。与此同时,这个过去在后装市场养活不少企业的功能配置,逐步进入前装标配的主赛道。 高工智能汽车研究院监测数据显示,2022年1-6月中国市场(不含进出口)乘用车前装标配搭载全景环视系统新车交付上险为253.81万辆,同比增长28.4%,前装搭载率为28.53%,继续保持稳定的增长势头。 在具体功能特点上,透明底盘

汽车屏类产品(二):360全景环视(SVC)、多分割显示、行车记录
前言 随着新能源汽车的快速发展,带动了车载器件的大发展,大的比如域控,小的创新更是不断涌现。而车载显示屏可以说是一大类产品,产品形态也是愈发多样化,比如:仪表cluster、中控IVI、副驾屏、行车记录仪、流媒体后视镜、透明A柱屏、方向盘屏(替代方向盘按键)、门饰板显示屏(替代门窗椅控制按键)、后排扶手屏(座椅控制)、空调控制屏(替代空调按键风量调节)、后排娱乐屏,甚至还有抬头显示HUD(可以将
汽车屏类产品(二):360全景环视(SVC)、多分割显示、行车记录
前言 随着新能源汽车的快速发展,带动了车载器件的大发展,大的比如域控,小的创新更是不断涌现。而车载显示屏可以说是一大类产品,产品形态也是愈发多样化,比如:仪表cluster、中控IVI、副驾屏、行车记录仪、流媒体后视镜、透明A柱屏、方向盘屏(替代方向盘按键)、门饰板显示屏(替代门窗椅控制按键)、后排扶手屏(座椅控制)、空调控制屏(替代空调按键风量调节)、后排娱乐屏,甚至还有抬头显示HUD(可以将

AidLux AI应用案例悬赏选题 | 车载360全景环视
AidLux AI 应用案例悬赏征集活动 AidLux AI 应用案例悬赏征集活动是AidLux推出的AI应用案例项目合作模式,悬赏选题将会持续更新。目前上新的选题涉及泛边缘、机器人、工业检测、车载等领域,内容涵盖智慧零售、智慧社区、智慧交通、智慧农业、智能家居等多个行业的真实应用场景。 开发者可以基于悬赏库内的选题(当然,我们也非常欢迎选题库外其他的idea),结合自己的专业能力,完成AI应