点云上专题
Transformer在点云上的应用
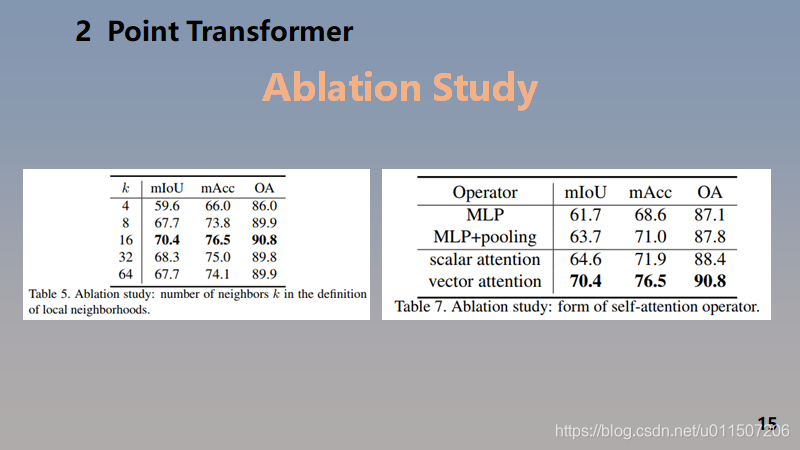
快速浏览了这两篇文章,方法都比较简单,一些思想都在前面的工作中或多或少都出现过。值不值的读,能不能中不好说。第二篇文章的方法还是很涨点的。 1 PCT: Point Cloud Transformer 2 Point Transformer

【ICCV2019论文阅读】PU-GAN:点云上采样对抗网络
摘要 从范围扫描获取的点云通常稀疏,嘈杂且不均匀。 本文提出了一种称为PU-GAN 的新点云上采样网络,该网络是基于生成对抗网络(GAN)制定的,旨在从潜在空间中学习丰富的点分布并在对象表面的子块上对点进行上采样。为了实现可运行的GAN网络,我们在生成器中构造了一个自上而下再向上的扩展单元,以对带有误差反馈和自校正的点特征进行上采样,并制定了一个自注意力单元来增强特征集成。 此外,我们设计了具有
Open3D在点云上画直线
想在点云上做一些标识,发现画直线比较方便,下面是我画了一个三角形。可以根据自己的情况改变坐标画出不同的形状 pcd.translate(np.array([0,0,20]))points = np.asarray(pcd.points)centroid = points.mean(axis=0)x1 = length1[1]y1 = centroid[1]z1 = centroid[
Online Quadrotor Trajectory Generation and Autonomous Navigationon Point Clouds 点云上的在线四旋翼轨迹生成和自主导航
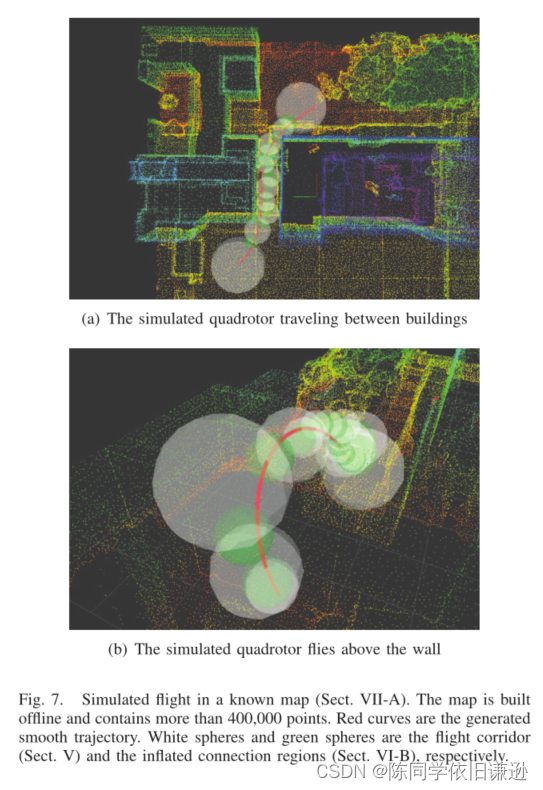
点云上的在线四旋翼轨迹生成和自主导航 摘要 在本文中,我们提出了一种直接在点云上在线生成自主四旋翼飞行安全轨迹的框架。考虑到四旋翼机在未知环境中运行,我们使用三维激光测距仪进行状态估计,同时构建环境的点云图。基于增量构建的点云地图,我们利用KD树中快速最近邻搜索的特性,采用基于采样的路径查找方法,在三维空间中生成具有安全保障的飞行走廊。然后使用在二次约束二次规划(QCQP)中制定的轨迹生成方法
【点云上采样】最近邻插值上采样算法
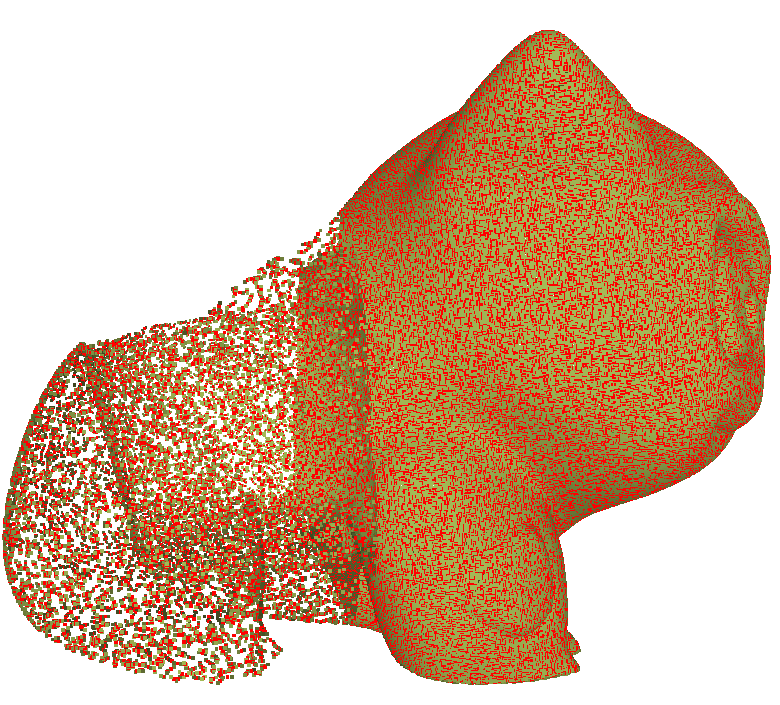
文章目录 声明简介代码 声明 本帖更新中 简介 点云最近邻插值上采样算法是一种常见的点云处理方法,用于将稀疏的点云数据进行上采样,增加点云的密度和细节。该算法基于最近邻的原理,在已有的点云数据中找到最近邻的点,并根据其位置和属性信息来生成新的点。 点云最近邻插值上采样算法的主要步骤如下: 对于每一个待上采样的点,确定其邻域内的最近邻点集合。可以使用欧氏距离或kd树等方法
【点云上采样】基于移动最小二乘(MLS)的上采样
文章目录 声明简介代码参考 声明 示例结果比较奇怪,可能是参数没调好,如有问题,望指正! 简介 基于MLS(Moving Least Squares)的上采样是一种常用的点云处理方法,用于增加稀疏点云数据的密度和细节。MLS上采样通过对点云进行局部拟合,并使用拟合结果生成新的点,从而实现点云的平滑和细节恢复。 MLS上采样的工作流程如下: 针对每一个待上采样的点,选择其邻