正逆专题
【Matlab】非对称3-SPR并联机器人正逆运动学
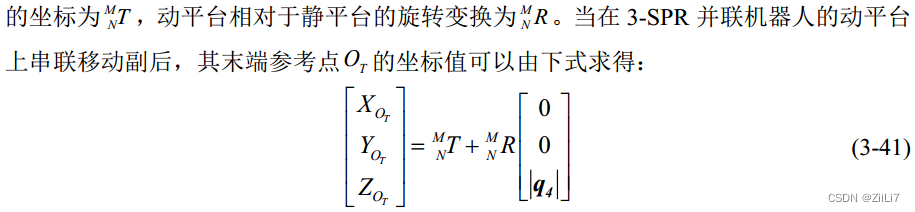
省流说明:本文提供球铰的非对称布置情况下其正逆运动学的求解,但需要有额外的输入参数 文章目录 3-SPR并联机器人的运动学模型逆运动学求解正运动学求解(待更新补充说明) 3-SPR并联机器人的运动学模型 S:球铰 P:移动副 R:转动副 3-SPR并联机器人即包含三条独立的SPR运动支链 输入:三个移动副(P)的伸长量 输出:系统末端参考点(一般是动平台的中心点) 运动学模型
非对称3-SPR并联机器人正逆运动学(Matlab源码)
省流说明:本文提供球铰的非对称布置情况下其正逆运动学的求解,但需要有额外的输入参数 文章目录 3-SPR并联机器人的运动学模型逆运动学求解正运动学求解(待更新补充说明) 3-SPR并联机器人的运动学模型 S:球铰 P:移动副 R:转动副 3-SPR并联机器人即包含三条独立的SPR运动支链 输入:三个移动副(P)的伸长量 输出:系统末端参考点(一般是动平台的中心点) 运动学模型