履带式专题

X-Space系统教程一之履带式机器人的基本原理
大家好,我是x-space的工程师,今天我来给大家讲讲如何DIY一个属于自己的履带式机器人。本次讲解呢,坚决做到让小白可以听懂的地步,各位同学如果没有听懂的话,可以在我的博客上留言,我会修改这篇文章中比较羞涩难懂的部分,争取让更多的人都能参与制作自己的机器人。当然我们这款机器人是我研究生阶段做的ARM11架构的基础上进行改版的,为了使更多的人可以自己做一台价格低廉,但是性能又不裁剪的机器人。 这

X-Space系列教程三之组装自己的履带式机器人
跟着本篇教程,你将很容易的组装出一台属于你自己的履带WIFI智能机器人。 一、功能详细接口图 WIFI模块、51主控板和驱动板接口详细说明图如下: WIFI模块详细接口图 51主控板详细接口图 驱动板详细接口图 二、组装步骤 第一步:将摄像头接入WIFI模块的USB接口
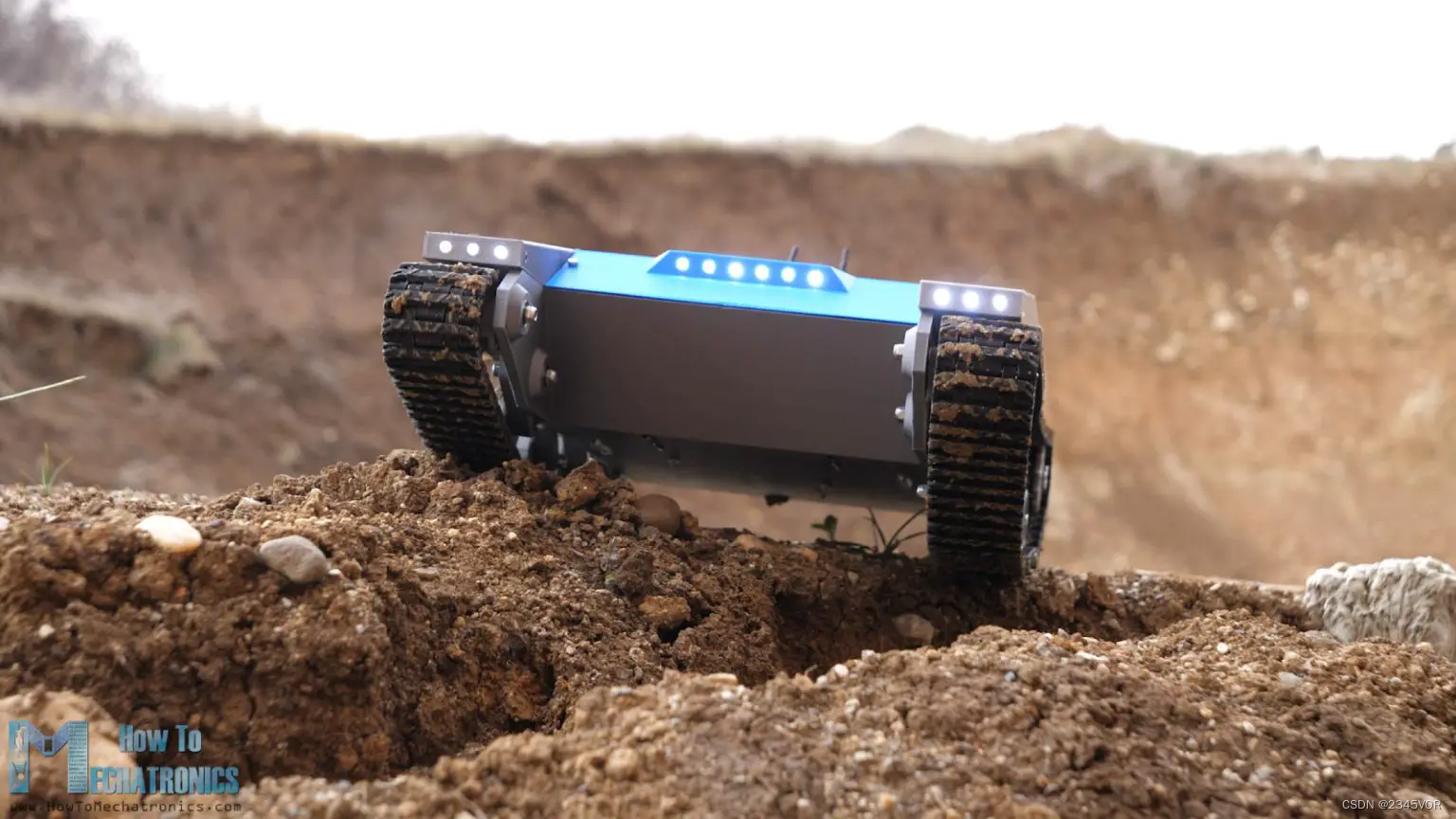
【全3D打印坦克——基于Arduino履带式机器人】
【全3D打印坦克——基于Arduino履带式机器人】 1. 概述2. 设计机器人平台3. 3D 模型和 STL 下载文件3.1 3D打印3.2 组装 3D 打印坦克 – 履带式机器人平台3.3 零件清单 4. 机器人平台电路图4.1 定制电路板设计4.2 完成 3D 打印储罐组件 5. 机器人平台编程6. 测试3D打印机器人 - 跟踪机器人平台 在教程中,我将向您展示我如何构建